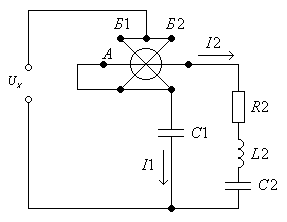
5.8 Сурет - Электромагниттік частотомердің схемасы.
5.4 Электродинамикалық өлшеуіш механизмдер
Электродинамикалық өлшеуіш механизмнің жұмыс істеу принципі екі катушканың магниттік өрістерінің токпен қозғалыссыз және қозғалмалы өзара әсеріне негізделген.
5 .9
және 5.10
суреттерде электродинамикалық өлшеуіш
механизм және оның структуралық схемасы
көрсетілген.
.9
және 5.10
суреттерде электродинамикалық өлшеуіш
механизм және оның структуралық схемасы
көрсетілген.
Бұл механизмде тізбектей жалғанған және ауалық саңылаумен бөлінген екі қозғалыссыз катушка (5.9-суретті қара), сондай-ақ 36 осінің көмегімен стрелкамен жалғанған 2 қозғалмалы катушкасы бар.
Қозғалмалы катушка ток кері әсер етуші моментті тудыратын серіппелер арқылы келтіріледі.
Тынышталу ауалық немесе магнитоиндукциондық тыныштандырғышымен тудырылады. Токтардың жүруі кезіндеөлшеуіш механизм катушкаларының орамаларында қозғалмалы бөлікті айналдыратын момент пайда болады. Тогы бар екі катушканың электромагниттік энергиясы:
![]()
мұндағы L1 және L2 – қозғалыссыз және қозғалмалы катушкалардың индуктивтігі;
M1,2 – қозғалыссыз және қозғалмалы катушкалардың өзара индуктивтігі;
I1 және i2 – катушкалардағы токтар.
Бұл механизмдерде L1 және L2 индуктивтігі қозғалмалы бөліктің бұрылу бұрышына тәуелді емес, сондықтан WЭМ электромагниттік энергиясының туындысының ауытқу бұрышы қатынасына тең айналдырушы момент:
![]()
![]() .
.
Катушка арқылы тұрақты токтардың өтуі кезінде айналдырушы момент:
![]() .
.
Катушка
арқылы синусоидалық формалы
![]() және
және
![]() айнымалы токтардың өтуі кезінде орташа
айналдырушы момент:
айнымалы токтардың өтуі кезінде орташа
айналдырушы момент:
![]() .
.
мұндағы I1 және I2 – токтардың әсер етуші мәндері;
- I1 және I2 токтары арасындағы фазалардың ығысу бұрышы.
Айналдырушы мен кері әсер етушінің арасындағы теңдіктен қозғалмалы бөліктің ауытқу бұрышын табамыз.
Тұрақты ток үшін бұрышы:
![]() .
.
Айнымалы ток үшін:
![]() .
.
Электродинамикалық механизмдердің логометрлері бір бірімен анықталған бұрышта бекітілген екі катушкадан тұрады. Қозғалмалы катушка токтар моментсіз токөткізгіштері арқылы келтіріледі.
Электродинамикалық өлшеуіш механизмдердің жетістіктері:
- тұрақт және айнымалы ток тізбектерінде 10Гц дейінгі жиілікпен жұмыс істеуі;
- өлшеулердің маңызды дәлдігі;
- көрсетулердің тұрақтылығы.
Кемшіліктері:
- сыртқы магниттік өрістердің ықпал етуі;
магнитоэлектрлік механизмдерге қарағандағы төмен сезімталдық;
- үлкен меншік тұтынылушы қуат;
- төмен жүктемелік қабілет;
- салыстырмалы күрделі конструкция;
- дайындаудағы қымбаттылық.
5.5 Ферродинамикалық өлшеуіш механизмдер.
Ферродинамикалық жүйе механизмдерінің электродинамикалықтан айырмашылығы қозғалмайтын орамада магниттік парақты материалдан жасалған магнит өткізгіш болады. 5.11. және 5.12. суреттерінде ферродинамикалық өлшеуші механизмінің сызбанұсқасы мен құрылымдық сұлбасы көрсетілген.
Екі магнит өткізгіштігі бар болғандығынан магнит өрісі мен айналу момент біршама өседі. Сол себептен ораманың магнит қозғаушы күші өседі және де механизмнің меншікті қуатпен қоректенуі бірқатар азаяды.
Каркас ішінде индукциялаеған токтар пайда болмас үшін қозғалмалы ораманы каркассыз етіп жасайды.
Ферродинамикалық механизмдер меншікті магнит өрісі өте күшті болғандықтан, магнит өткізгіш былайша айытқанда экран болғандықтан сыртқы магнит өрістері әлсіз әсер етеді.
 Тоқтатқыштар
магнит индукциялық және сұйықтық болады.
Тоқтатқыштар
магнит индукциялық және сұйықтық болады.
Өзекше бар болуы үлкен қосымша қателік тудырады, ол гистерезиспен түсіндіріледі.
Ферродинамикалық механизмде өзекше электродинамикалық құрышпен немесе пермалойдан жасалған пластинадан жиналған және қателікті азайту үшін бір бірінен ажыратылған, соған қарамастан, берілген механизм электродинамикалықпен салыстырғанда дәлдігі аз.
Электродинамикалық механизмдердің қателік формулалары ферродинамикалық механизмдерге әділ.
Қозғалмалы ораманың ауа кертігінде орын ауыстырады. Ондағы магнит өрісі радиалды және бірқалыпты болса, онда келесі қатынас:
![]()
Онда
электродинамикалық механизмнің айналу
моментінің
формуласы
берілген жүйе үшін мынандай болады:![]()
![]() ;
;
мұндағы С – аспаптың құрылымен және бірліктер жүйесін таңдаумен анықталған коэффициент;
В1– I1 тогы тудыратын магнит өрісінің индукциясы,
- I2 және В1 арасындағы бұрыш.
Бұл формулада I1 тогын В1 индукциясына ауыстырамыз, өйткені олар тура пропорцанал. I1 тогы мен В1 индукция арасындағы жылжу бұрышы өте аз болғандықтан, айналу моментінің формуласы келесідей болады:
![]() ;
;
Қозғалатын рамканың бұрылу бұрышы тең болады:
![]() ;
;
Жетістіктері: Электродинамикалық өлшеу механизмімен салыстырғанда ферродинамикалық өлшеу механизмнің келесі жетістіктері бар :
- сыртқы магнит өрістер әсеріне сезгіштігі аз;
- қуатпен аз қоректенеді;
Кемшіліктері:
- дәлдігі аз,
- жиілікті диапазоны жіңішке.
Электродинамикалық немесе ферродинамикалық жүйелер негізінде амперметрлерді,егер токтар 0,5А ге дейін өзгергенде, өлшеуіш механизмдерді қозғалмалы және қозғалмайтын орамаларды тізбектей қосады. Сонда I1=I2, ал cos =1, сонда ауытқубұрышы тең болады:
![]()
Өлшеу тогымен бұрылу бұрышының сызықты тәуелділігін алу үшін айналу моменттінен орын ауыстыру бұрышымен туындысы сызықтық еместіктерді реттейтін етіп, қозғалмайтын орамаларды орналастырады. Тәжірибе жүзінде ұзындығынан 25 100% шегінде шкаласы бірқалыпты.
Токтардың өзгеруі 0,5 А-ден асса, онда қозғалмалы және қозғалмайтын орамаларды тізбектей қосады. Бұл жағдайда орамалар ішіндегі токтардың көп таралып кетуіне пайда болған қателіктерді температуралық және жиіліктік компенсациялаумен қамтамасыз ету керек.
Температуралық қателіктің компенсациясы манганиннен және мыстан жасалған қосымша резиторлардың кедергілерін жинауымен жүзеге асырылады.
Ол резисторлар параллель тармаққа бұл тармақтың кедергі температурасының коэффициенттеріне бірдей болып қосылған.
Жиілік қателіктің компенсациясын сәйкес тармақ сұлбасына қосымша индуктивті ораманы немесе конденсаторларды қосу арқылы жүзеге асырады. Тармақтардағы уақыт тұрақтылары тең болу керек.
Температуралық және жиілік компенсация шарттары орындалған параллель қосылған тізбектер үшін қозғалмалы және қозғалмайтын орамалар ішіндегі токтар тең болады:
![]()
![]()
мұндағы I –өлшеу тогы.
Ауытқу бұрышының мәні:
![]() .
.
Берілген амперметрлерді екі өлшеу диапозонына шығарады. Шектердің өзгеруі орамаларды тізбектей немесе параллель қосу арқылы жүзеге асырылады. Өлшеу шектерін үлкейту үшін өлшеуіш ток трансформаторларын қолданады.
Берілген жүйелерде вольтметрлерде қосымша резистор қолданылады және барлық орамалар мен қосымша резистор тізбектей қосылған қозғалмалы бөліктің ауытқу бұрышы тең болады:
![]() ;
;
мұндағы
![]() -аспап тұрақтысы;
-аспап тұрақтысы;
Z –вольтметр тізбегін толық кедергісі.
Өлшеу дипазоны аз вольтметрлерде үлкен температуралық қателіктен, орам сандарын азайтып, орама кедергісін азайтады , ол қоректі қуатты көбеюіне әкеледі.
Амперметрлер мен вольтметрлердің негізгі қолдану ауданы - ол 45 тен 1000 Гц жиілік дипазонындағы тұақты айнымалы тізбекке дәл өлшеу жүргізу. Оларды басқа аспаптарды градуирленген үлгілі аспап реттінде қолданылады. Дәлдік класы 0,1; 0,2; 0,5;
Ферродинамикалық аспаптарды ауыр жұмыс істеу жағдайында қолданылады. Олар 1,5 және 2,5 дәлдік класымен – селкілдеу -, - дірілдеу-, және соққыға төзімді етіп шығарады.
Ваттметрлер. Ваттметрлерді қосу тізбегі 5.13 суреттінде көрсетілген.
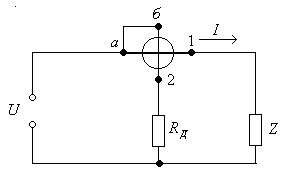
Сурет 5.13 Ваттметрлерді қосу тізбегі.
Бұл жағдайда қосылмайтын орамалар Z қуатын өлшеу объектімен тізбектей қосылады. Rд қосымша кедергімен қозғалмалы орама тізбектей параллель қосылады. Қозғалатын бөліктің ауытқу бұрышы (тұрақты ток үшін) тең:
![]() ;
;
мұнда
![]() – өлшеуіш қуат;
– өлшеуіш қуат;
S – сезімталдық.
Қозғалмалы бұрыштың ауытқу бұрышы айнымалы ток үшін тең болады:
![]()
Егер = 0 болса, онда ауытқу актив қуатына пропорционал болады. Бұл тізбекке қосымша резисторге параллель қосылған конденсатор сыйымдылығын келтірумен жасалады. Жиілік өзгергенде конденсатор сыйымдылығын жаңадан таңдау керек.
Жоғары омдық және төменгі омдық жүктеме қуатын өлшейтін ваттметрдің қосылу сұлбасы 4.14 суретте көрсетілген.
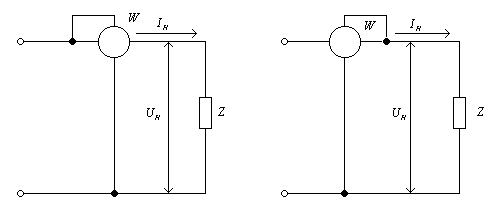
а) б)
Сурет 5.14 - Әртүрлі жүктемелер қуатын өлшеу үшін.
а)Жоғарыомдық жүктеме; б) Төмеңгіомдық жүктеме.
Жоғарыомдық жүктеме үшін қуат өлшемінің қателігі тең:
![]()
Төменгіомдық жүктеме үшін қуат өлшемінің қателігі тең:
![]()
![]()
мұндағы PI және PU – тізбектей және параллель орамаларға сәйкес келетін қоректі қуат;
PH – жүктеменің қорек қуаты.
Ваттметрдің тізбек қысқыштардың қосылу тәртібінің өзгеруі қозғалмалы механизм нің ауытқу бағытының өзгеруіне әкеледі. Сондықтан тізбектей және параллел тізбектің бір қысқышы жұлдызшамен белгіленеді.
Жиілікті үшін частотомер қолданылады. Ол электродинамикалық логометрлік өлшеуіш механизмде және 5.15 суретінде көрсетілген.
Б1 ораманың параметрлерін I1 тоғы мен Uх өлшенетін жиілік кернеуі арасындағы фазалық жылжу 90 тең етіліп таңдалынады.