

Работа рлс-н в режиме «самолёты».
Режим «САМОЛЁТЫ» предназначен для обнаружения встречных самолётов в районах с интенсивным воздушным движением. В этом режиме работа ведётся острым лучом пассивным (I КАНАЛ) или активным (II КАНАЛ) методом.
Обнаружение самолётов пассивным методом осуществляется в результате приёма отражённых от них эхо-сигналов, наблюдаемых на экранах индикаторов в виде точечных ярко светящихся меток на фоне отражений от земной поверхности, горных вершин или грозовых фронтов. При этом обеспечивается определение местоположения самолёта (азимут и дальность) и степени опасности столкновения. Степень опасности столкновения оценивается по движению метки самолёта на экране. Встречный самолёт считается опасным, если при сближении с ним азимутальное положение его яркостной метки на экране индикатора не меняется. В таких случаях необходимо произвести обходной манёвр. Применение пассивного метода позволяет обнаружить встречный самолёт на расстоянии до 25-30 км.
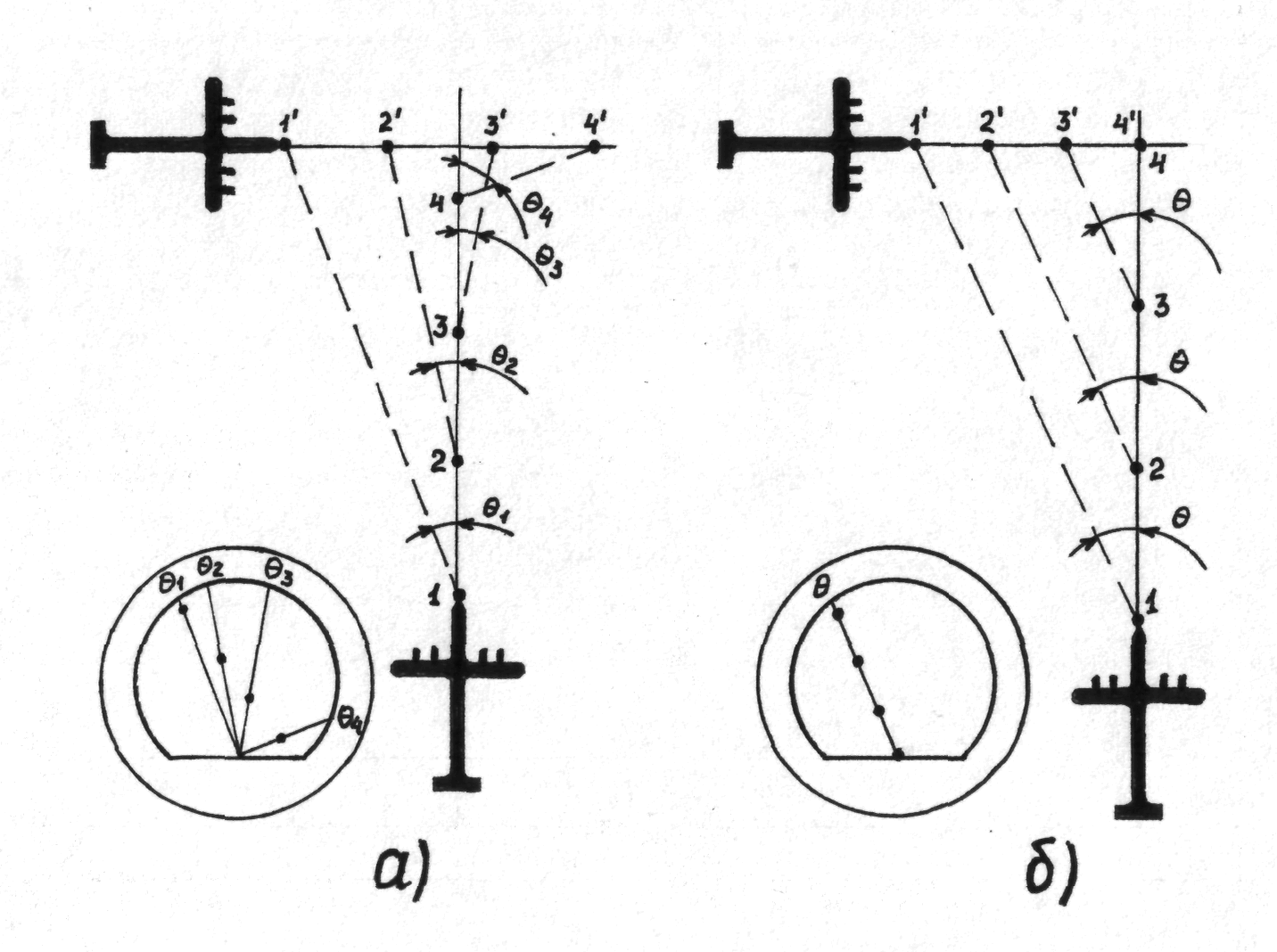
Определение степени опасности встречного самолета:
а)не опасно б) опасно
Для увеличения дальности обнаружения до 40-50 км применяется активный метод. Обнаружение встречных самолётов активным методом возможно, если эти самолёты оборудованы аппаратурой активного ответа. В этом случае производится запрос самолётов с помощью СР30-2М. При появлении самолёта, оборудованного ответчиком, срабатывает схема сигнализации по его ответному сигналу. При этом загорается световое табло «ВСТРЕЧНЫЙ САМОЛЁТ», и на экранах индикаторов появляется метка от этого самолёта на соответствующей дальности. При этом на экранах не будет других меток, полученных от эхо-сигналов.
Оценка степени опасности столкновения с встречным обнаруженным самолётом в этом случае не возможна, так как метка получается в виде дуги, и можно определить только дальность до него.
При снижении или наборе высоты в районе с интенсивным воздушным движением рекомендуется выключать стабилизацию антенны по тангажу для того, чтобы обеспечить обзор в плоскости движения самолёта.
Работа рлс-н в режиме «маяк».
Режим «МАЯК» предназначен для запроса наземных маяков-ответчиков и индикации принятых сигналов на экранах индикаторов.
Работа в этом режиме осуществляется на масштабах M15, М30, М50, М150. Ответные сигналы маяка принимаются аппаратурой А-811 и после обработки и декодирования поступают в станцию для индикации в виде яркостной метки на экранах индикаторов.
По меткам от маяка и калибрационным меткам определяется дальность до радиолокационного маяка и его азимутальное положение. При приближении к маяку на расстояние менее 50 км включается электронное перекрестие, с помощью которого можно более точно определить положение маяка относительно самолёта. Используя метку от маяка и электронное перекрестие, можно выполнять задачи выхода в заданную точку.
ЗАНЯТИЕ 3 «СИСТЕМА МЕЖСАМОЛЁТНОЙ НАВИГАЦИИ МСН»
1 Вопрос «назначение и состав системы мсн»
Система межсамолётной навигации (МСН) самолёта предназначена для определения и контроля взаимного расположения самолётов в воздухе при вождении самолётов в боевых порядках (ВСБП) и решает следующие задачи:
Индикацию самолётов боевого порядка на экранах индикаторов 2НВ-4 лётчиков и штурмана станции РЛС-Н.
Автоматическое выдерживание заданных интервала и дистанции до впереди идущего самолёта в боевом порядке.
Индикацию на индикаторах КП1-46 лётчиков линейной или временной дистанции, фактического или заданного интервала в боевом порядке, потребного изменения воздушной скорости для занятия заданной дистанции.
Выдачу сигналов на стрелки крена КПП лётчиков для директорного управления самолётом при выдерживании заданного интервала.
Сигнализацию об опасном сближении с впереди идущим самолётом.
В состав системы МСН входят следующие подсистемы:
Управляющий вычислительный комплекс КП1-76.
Радиолокационная станция РЛС-Н.
Аппаратура «КЛИН».
Самолётный ответчик СОМ-64.
Станция предупреждения об облучении СПО-10.