Лабораторная работа
“ИЗУЧЕНИЕ ПНЕВМАТИЧЕСКИХ, ГИДРАВЛИЧЕСКИХ И КОМБИНИРОВАННЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ”

Главная | Общие сведения | Исполнительные механизмы | Регуляторы и приборы
Построение АСР | Средства гидроавтоматики | Литература
![]()
Лабораторная работа изучение пневматических, гидравлических и комбинированных систем автоматического управления
Цель работы: |
Изучение пневматических средств автоматизации и принципов построения пневматических систем управления |
Задачи работы: |
|
1. Общие сведения о пневматических средствах автоматизации
Пневматические средства автоматизации (ПСА) представляют собой технические устройства и приборы, использующие энергию сжатого воздуха. ПСА пожаро- и взрывобезопасны, обладают высокой надежностью при работе в условиях агрессивных сред, электромагнитных воздействий и изменений температуры; достаточно просты в эксплуатации. К недостаткам ПСА относят сравнительно низкое быстродействие, обусловленное небольшой скоростью передачи пневмосигналов (близкой к скорости звука в воздуховоде); сложность построения высокоточных вычислительных устройств; относительно высокую энергоемкость. Вследствие этого ПСА применяют чаще всего для автоматизации достаточно инерционных ТОУ с постоянными времени не менее 10-30 с; максимальная длина пневмокоммуникаций в таких системах управления не должна превышать 250-300 м; Несмотря на эти ограничения, в химической промышленности ПСА составляют 60-70% от общего числа средств автоматизации.
1.1. Принципы конструирования пса
Серийные ПСА строят на основе принципов компенсации перемещений и сил: принцип сравнения расходов пока не нашел применения в приборостроении.
Устройства и приборы ПСА, построенные на принципе компенсации перемещений, основаны на преобразователях пневмосигналов в линейные перемещения и содержат механические рычаги, тяги и другие элементы. Такие устройства имеют сложную механическую часть, обладают небольшими коэффициентами усиления и низкой эксплуатационной надежностью. Принцип компенсации перемещений широко применяют при конструировании ПСА, а также иногда используют при создании встроенных регуляторов.
Устройства ПСА, базирующиеся на принципе компенсации сил, содержат преобразователи давлений в усилия и мембранные компараторы. Для таких устройств характерны почти полное отсутствие механических узлов, малые перемещения чувствительных элементов и большие коэффициенты усиления. На этом принципе сконструированы пневматические устройства и приборы ГСП [1,2].
1.2. Конструктивное оформление пса
Отечественные ПСА имеют четыре условных уровня агрегатизации: элементный, модульный (агрегатный); приборный и блочный.
Под элементом в ПСА понимают законченную конструкцию, предназначенную для выполнения одной простой операции (усиление, сложение, преобразование и т.п.). Элементы условно классифицируют на простые (неделимые) и сложные (составные). Простые элементы (дроссели, емкости, мембраны, пружины и др.) не имеют самостоятельного значения в ПСА, их используют для конструирования более сложных элементов (типа пневмокамер, усилителей, реле и т.п.).
Совокупность элементов с унифицированными сигналами и единым конструктивным оформлением образует систему элементов. Применяемые системы элементов ПСА обычно избыточны, в их состав входят более сложные узлы, ячейки, модули с единым конструктивным оформлением. Отечественные ПСА базируются преимущественно на универсальной системе элементов промышленной пневмоавтоматики (УСЭППА), комплексе миниатюрных элементов и модулей пневмоавтоматики (КЭМП) и - частично - системе элементов струйной техники.
Элементы ПСА по характеру изменения сигналов во времени разделяют на аналоговые и дискретные. Сигналы аналоговых элементов изменяются в стандартном диапазоне (20-100) кПа, дискретные сигналы принимают условное значение «0» (не более 10 кПа) и «1» (не менее 110 кПа). Питание всех элементов УСЭППА и КЭМП осуществляется сжатым воздухом давлением (140±14) кПа.
Элементы УСЭППА и КЭМП конструктивно допускают "печатный" монтаж на платах с расположенными в них межэлементными каналами. Элементы УСЭППА имеют небольшие габаритные размеры - в среднем 40x40x50 мм; линейные размеры элементов КЭМП уменьшены в 1,5- 2 раза.
Элементы ПСА применяют для построения более сложных устройств - модулей (ячеек), выполняющих самостоятельные функции типа интегрирование, дифференцирование, запоминание и т.п. Конструктивно модуль представляет собой единое устройство, состоящее из группы элементов, которые закреплены на унифицированной плате и соединены внутренними коммуникационными каналами.
Модули с унифицированными информационными и конструктивными характеристиками называют агрегатами. Каждый агрегат предназначен для выполнения определенной функции системы контроля или регулирования, например сигнализации, стабилизации, регистрации.
Приборное конструктивное оформление ПСА предполагает размещение в корпусе одного прибора всех (или почти всех) ячеек, реализующих АСР -измерительного, задающего, регулирующего и регистрирующего устройства. Приборные ПСА строят по принципу компенсации перемещений, что снижает их функциональные возможности и усложняет эксплуатацию.
Блочное конструктивное оформление ПСА применяют при построении систем контроля и управления сложных ТОУ. В этом случае систему управления делят на ряд взаимосвязанных блоков, содержащих однотипные функциональные агрегаты или модули, например регуляторы, регистраторы, сигнализаторы и т.п. Блочная компоновка упрощает проектирование, монтаж и эксплуатацию пневматических систем управления. Блочный принцип построения широко используют при создании пневматических и пневмоэлектрических комплексов ТСА типа "Центр", "Режим", "Ритминал" [2, 3].
![]() Элементы и устройства
пневматических средств автоматики
Элементы и устройства
пневматических средств автоматики
|
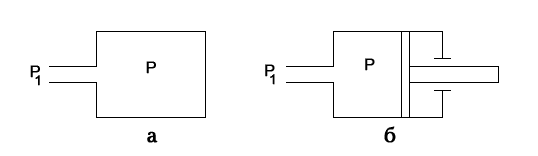
ЭЛЕМЕНТЫ И УСТРОЙСТВА ПНЕВМАТИЧЕСКИХ СРЕДСТВ АВТОМАТИКИ Под элементами в пневмоавтоматике понимают относительно простые функционально и (или) законченные конструктивно части более сложного устройства, предназначенные для выполнения одной сравнительно простой операции или преобразования сигнала. Элементы условно можно классифицировать на простые (неделимые) и составные. 2.1. Простые элементы К простым элементам относятся пневматические емкости, дроссели, пневмопроводы, мембраны, сильфоны, пружины и, наконец, механические рычаги. Из них собирают составные элементы: пневматические камеры, преобразователи, усилители, сумматоры. Каждый составной элемент выполняет одну операцию или функцию. Пневматическое устройство в целом реализует, как правило, ту или иную функцию переработки информации. Емкости Емкости предназначены для накопления сжатого воздуха. Параметры емкости ее объем V и (иногда) число вводов (выводов) потоков воздуха. Различают емкости постоянного и переменного объема (рис.1.1), причем в последнем случае объем V изменяют вручную. Входной координатой являются давление Р1 и расход G воздуха на входе в емкость, выходной - давление воздуха Р или его масса М в емкости.
Рис.1.1. Схемы пневматических емкостей постоянного (а) и переменного (б) объема
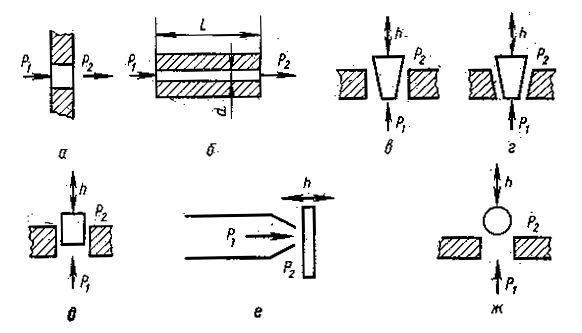
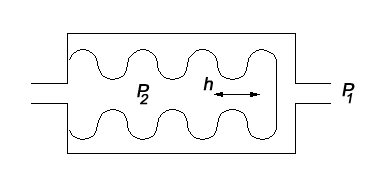
Рис. 1.2. Принципиальные схемы дросселей: а - капилляр; б - жиклер; в -конус-цилиндр; г - конус—конус; д - цилиндр—цилиндр; е - сопло-заслонка; ж - шарик-цилиндр. Пневмоемкость не получила самостоятельного применения, однако в сочетании с дросселями на вводах и выводах ее широко используют для построения проточных и глухих камер. Дроссели Дроссели (пневмосопротивления) предназначены для создания местного гидравлического сопротивления движущемуся потоку воздуха и, следовательно, для изменения его расхода. Поэтому основной выходной координатой дросселя является расход воздуха G, а входными - давление воздуха до и после дросселя Р1и Р2 либо их разность Р=Р1-Р2. По режиму течения воздуха дроссели делятся на ламинарные, турбулентные и смешанные; по способу создания сопротивления - на постоянные, регулируемые (вручную) и переменные; по виду статической характеристики - на линейные и нелинейные (рис.1.2). Подробнее о дросселях.
Наибольшее распространение в пневмоавтоматике получили ламинарные дроссели типа капилляр (L =20 мм, d=0,18 и 0,32 мм) и конус-конус, а также турбулентные сопло-заслонка (h=0,03-0,1 мм, d=0,5 мм) и шарик-цилиндр. Пневмопроводы
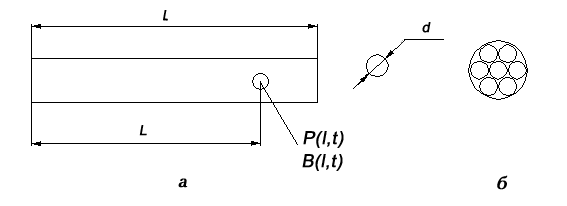
Пневмопроводы
служат для передачи импульса давления
или изменений расхода воздуха на
достаточно большие расстояния L (от
нескольких метров до 250—300 м).
Пневмопроводы выполняют из пластмассовых
или металлических трубок внутренним
диаметром d=1-8 мм; иногда пластмассовые
трубки объединяют в пневмакабели
(рис.1.4, а, б). Пневмопроводы используют
для соединения отдельных элементов
и устройств внутри пневматических
приборов (L
Рис. 1.3. Схемы одиночного пневмопровода (а) и пневмокабеля (б). Пневмопроводы классифицируют на расходные и безрасходные. Подробнее...
Мембраны Мембраны применяют в пневмоавтоматике для преобразования давления воздуха в перемещение или в силу. Мембраны делят на упругие и «вялые». Упругие мембраны выполняют из тонких металлических пластин (сталь, бронза, латунь). Они обладают достаточно большой собственной жесткостью, их статические характеристики, представляющие зависимость перемещения h центра мембраны или развиваемой силы Ф от давлений P1 и Р2 или перепада Р=Р1—Р2, обычно нелинейны. Применяют плоские и гофрированные упругие мембраны (рис.1.4, a,б). Наличие гофров делает статическую характеристику мембраны более линейной.
Рис. 1.4. Принципиальные схемы мембран: а, б —упругой, плоской и гофрированной; в, г — «вялой» плоской и гофрированной; д — двойной гофрированной. Упругие мембраны используют преимущественно как чувствительные элементы в первичных преобразователях, например в дифманометрах. «Вялые» мембраны выполняют из прорезиненной тонкой ткани (капрон, шелк, полотно). К ним предъявляют два требования - отсутствие собственной жесткости и большая прочность. Эти требования вытекают из основного назначения «вялых» мембран — преобразовывать большие перепады давлений (до 105 Па) в силу при крайне малых перемещениях (порядка сотых долей мм). «Вялые» мембраны обычно снабжены металлическим жестким центром. Они могут быть плоскими гофрированными (рис.1.4, б, з). Статическая характеристика "вялой" мембраны
Тонкие «вялые» мембраны широко применяют в различных устройствах пневмоавтоматики, построенных на принципе сравнения сил (сумматоры, усилители, повторители). Недостатком таких мембран является довольно быстрая потеря эластичности и изменение статических характеристик как во время работы, так и при длительном хранении. В пневматических исполнительных механизмах широко используют многослойные прорезиненные мембраны больших диаметров dм, предназначенные для преобразования перепада Р в большие усилия, необходимые для перемещения регулирующих и запорных органов. В этих мембранах перемещение жесткого центра достигает 20-60 мм, что, естественно, увеличивает нелинейность статической характеристики. Сильфоны Сильфоны предназначены для преобразования давления или силы в перемещения (рис.1.5.). Они представляют собой упругие тонкостенные гофрированные оболочки (трубки), изготовляемые из бронзы с различными присадками или из специальных сталей. Наличие гофров позволяет перемещать днище сильфона на значительное расстояние (десятки миллиметров) без заметного изменения его характеристик. Выходная координата сильфона - перемещение h, входные - давления Р1 и Р2 или их разность Р либо сила Ф.
Рис. 1.5. Принципиальная схема сильфона. Статическая характеристика сильфона
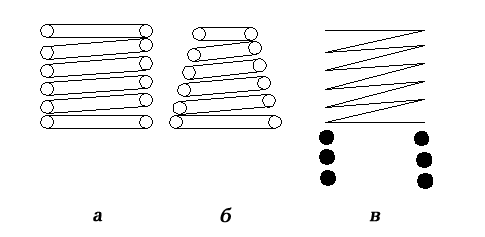
Пружины Пружины предназначены для преобразования силы в перемещение, часто -значительное. По форме они делятся на цилиндрические и профильные (рис.1.6, а, б), по направленности действия - на пружины сжатия, растяжения, кручения и (реже) изгиба. Выходная координата пружины - перемещение h, входная - сила Ф. Статическая и динамическая характеристики пружин
На рис.1.6, в показано условное обозначение пружин на принципиальных схемах пневмоавтоматики.
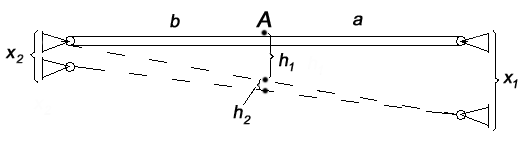
Рис. 1.6. Схемы пружин: а - цилиндрические; б - профильной; в - условные обозначения. Механические рычаги Рычаги представляют собой механические стержни с одной или двумя осями вращения, которые либо перемещаются в пространстве, либо закреплены неподвижно (рис.1.7, а, б). Рычаги применяют для суммирования и усиления перемещений и сил.
Рис.1.7. Принципиальные схемы рычажных сумматоров перемещении (а) и усилий (б). Статическая характеристика рычажного сумматора
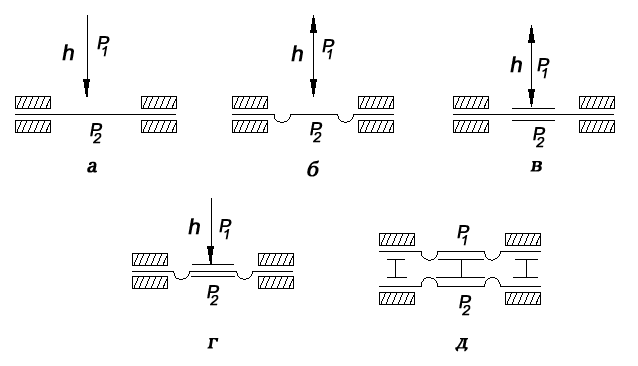
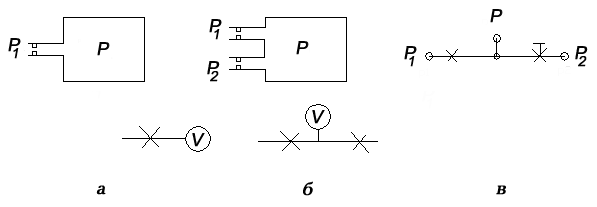
2.2. Сложные элементы ПСА. К ним относят пневматические камеры, дроссельные делители, преобразователи перемещений и сил в давление, усилители давления и мощности, сумматоры и реле. Пневмокамеры служат для аккумуляции сжатого воздуха и изменения его давления во времени по определенному закону. Камера состоит из емкости объемом V и нескольких ПС на вводах. Различают глухие камеры с одним вводом V, (рис.1.8, a) и проточные камеры, у которых два и более ввода (рис.1.8, б). Статическая характеристика проточной камеры
Рис.1.8. Схемы камер: а- глухой; б - проточной; в дроссельного делителя Динамическая характеристика проточной камеры
Дроссельные делители предназначены для суммирования давлений Р1, Р2,...,Рm с весами k1, k2,...,km. Делители строят на базе проточных камер малого объема с ламинарными ПС проводимостью aj (j = 1,2,..., m). Суммарное давление в камере делителя
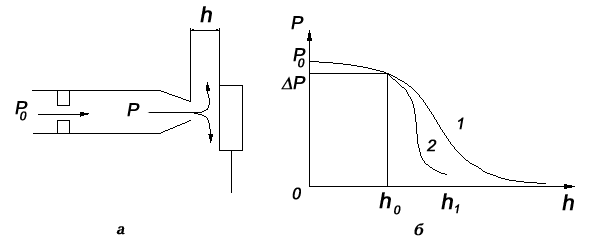
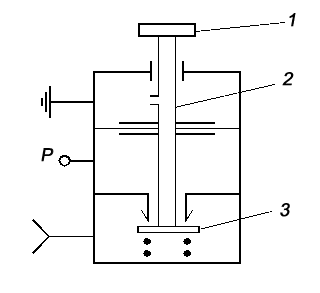
где kj=aj/(a1 + а2+ ... +аm); Статическая погрешность делителя при близких Рj не превышает 2-4% и зависит от способа измерения Р. В динамическом отношении делители рассматривают как усилительные звенья в области частот [0; 0,7] рад/с. В ПСА чаще всего используют делители с m=2 и V=0; схема этого элемента показана на рис.1.9, в. Преобразователи перемещений и усилий в давление Эти элементы предназначены для преобразования малых перемещений и усилий в достаточно большие изменения давления воздуха. Эффект преобразования осуществляется чаще всего элементом, содержащим переменный дроссель. Преобразователь перемещения в давление типа сопло-заслонка показан на рис.1.9, а. В него входят постоянный дроссель, проточная камера небольшого объема и переменный дроссель, построенный на пневматическом сопле и заслонке. Перемещения заслонки h приводят к изменению гидравлического сопротивления вытекающей из сопла струи и соответственно - давления Р в камере. При удалении заслонки от сопла на 0,15—0,20 мм давление Р становится равным нулю. Статическая характеристика преобразователя
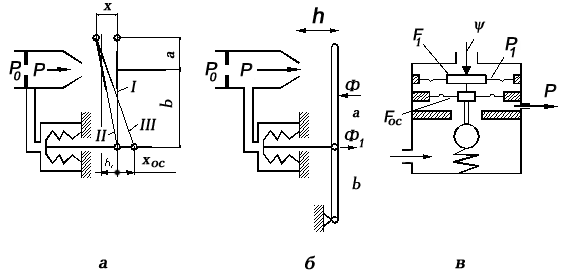
Рис.1.9. Преобразователь перемещения в давление типа сопло-заслонка: a- принципиальная схема; б - статическая характеристика; l - преобразователь с постоянным давлением Р0; 2 — преобразователь с постоянным перепадом Р—Р0—Р. Описанный преобразователь не имеет обратной связи, поэтому плохо работает при перекосах заслонки, вибрациях, колебаниях давления воздуха и т.п. Наибольшее распространение в пневмоавтоматике получил преобразователь перемещения в давление с отрицательной обратной связью, (рис.1.10, а). Он состоит из проточной камеры с постоянным и переменным дросселем, сильфона обратной связи и механического рычага - сумматора перемещений. Статическая характеристика преобразователя
Рис 1.10.. Принципиальные схемы преобразователей с обратной связью: а -перемещения в давление: б — силы в давление; в — силы в давление (типа шарик - седло). Принципиальная схема преобразователя силы в давление приведена на рис.1.10, б. Преобразователь состоит из проточной камеры с постоянным и переменным (типа сопло — заслонка) дросселями, сильфона обратной связи и рычажного преобразователя усилий в перемещение. Статическая характеристика преобразователя
На рис.1.10, в показана схема преобразователя силы (или перемещения) в давление, базирующегося на переменном дросселе типа шарик — седло (шарик — цилиндр). Статическая характеристика преобразователя
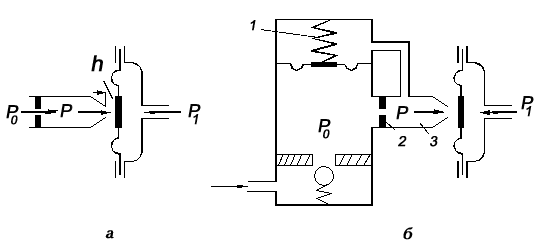
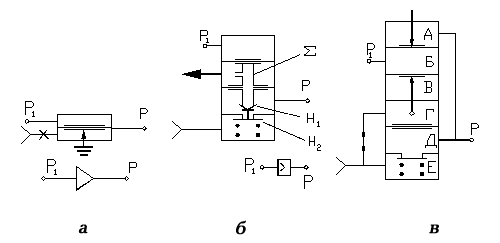
Рис.1.11. Принципиальные схемы усилителей давления типа сопло -заслонка: а - с постоянным давлением P0; б - с постоянным перепадом DР=Р0-Р; 1 - пружина; 2— дроссель; 3 — проточная камера. Преобразователи шарикового типа применяют для построения усилителей давления и (чаще) мощности (расхода) пневматических сигналов. Одновходовые усилители строят на базе переменного ПС типа сопло -заслонка и стабилизатора перепада давления Р0 - Р (рис.1.12, а). Статическая характеристика преобразователя
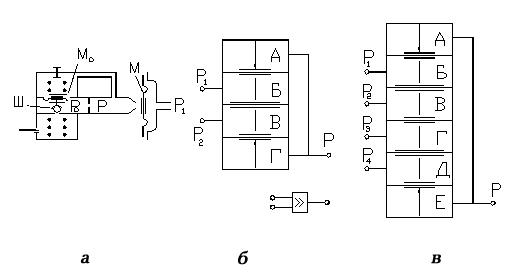
Двух- и четырехвходовые усилители конструируют на основе двух последовательно включенных переменных ПС типа сопло-заслонка и мембранного сумматора сил, формируемых давлениями Р1, Р2, или Р1 - Р4. (рис.1.12, б, в). Статическая характеристика преобразователя
Усилители давления УСЭППА называют элементами сравнения: трехмембранный элемент П2ЭС.1 (рис. 2.14, 6) сравнивает два давления Р1 и Р2 и в зависимости от знака их разности формирует на выходе сигнал "0" или "1" (в системе КЭМП аналогичный элемент назван компаратором КАМП). В пятимембранном элементе П2ЭС.З сравнивают три давления (на рис.2.12, в камера Д соединена с атмосферой); выходной сигнал вне зоны линейности равен нулю или единице.
Рис.1.12. Схемы усилителей давления: а - двухвходового; в - четырехвходового Элементы сравнения используют для построения сумматоров двух, трех или четырех давлений. Для этого в камеру Д четырехвходового усилителя (рис. 2.12, в) вводят сигнал отрицательной обратной связи из камеры Е. В этом случае равновесие мембранного сумматора сил возможно на линейном участке статической характеристики при Р=Р1-Р2+Р3. На этом усилителе можно выполнять разные операции: при Р1=PБ=РГ имеем Р=2Р1-Р2; при Р1=Рk=0 получим Р=Р1 - Р2; при Р2=РВ=0 имеем P=P1+P3; при РВ=РД=Р получим Р=(Р1+Р3)/2. В динамическом отношении сумматоры представляют усилительный элемент при частотах до 10-20 рад/с; основная погрешность сумматора на базе П2ЭС.З не выше 0,5%. В состав КЭМП входит сильфонный сумматор трех давлений типа СМАМП, основная погрешность суммирования - 0,5%. Усилители мощности предназначены для увеличения расхода воздуха без существенного изменения его давления. Такие усилители называют пневмоповторителями и применяют для разделения пневматических устройств на независимые по расходу части. Различают точные (маломощные) и грубые (мощные) повторители, имеющие разные классы точности и расходы воздуха. Точный повторитель
Точный повторитель со сдвигом
Рис.1.13. Схемы пневмоповторителей: а - точного маломощного типа П2П.1; б - грубого мощного типа П2П.З; в - точного мощного типа П2П.7 Грубый и мощный повторители
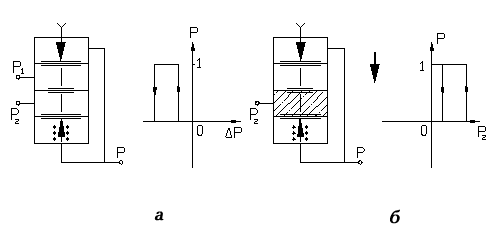
В КЭМП входят точные маломощные повторители без сдвига ПАМП-1 (класс точности 0,25) и со сдвигом ПАМП-2 (класс точности 0,5), а также мощный усилитель ПАМП-3 (класс точности 0,5, расход воздуха 1500 л/ч). Релейные элементы ПСА используют для реализации зависимости P=signP (где P =Р1-Р2; Р1, Р2 входные сигналы). Реле строят на базе двухвходовых усилителей давления с положительной обратной связью и регулируемым смещением С статических характеристик. Для создания смещения в одну из камер усилителя вводят малое или большое давление подпора, равное 30-40 или 70-80% от давления питания Рn (на схемах ПСА камера малого подпора имеет одинарную штриховку, большого - двойную). Схемы и статическая характеристика реле
В составе КЭМП специальных релейных элементов нет, их функции выполняют клапаны.
Рис.1.14. Схемы и статические характеристики реле: а--без смещения; б—со смещением.
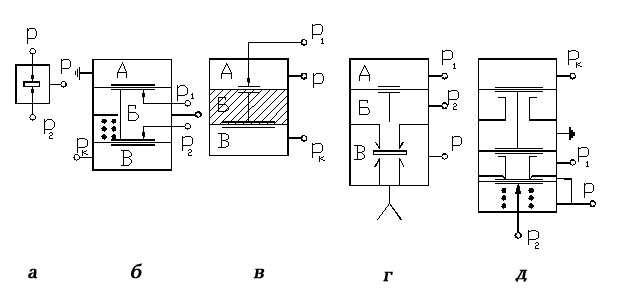
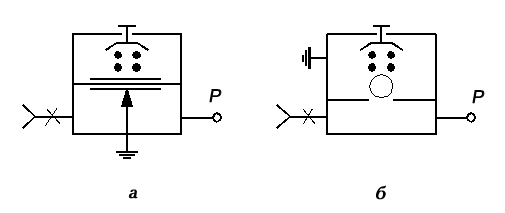
Рис.1.15. Схемы клапанов: а - безмембранный типа ПЗК.5; 6 -выключающее реле П-1108; в - одноконтактный клапан ПЗК.1; г — модуль интегральный П1МИ; д - клапан КЛАМП Для коммутации пневматических сигналов и реализации простейших логических операций в ПСА применяют выключающие реле и клапаны. Подробнее...
Для формирования пневмосигналов определенного уровня в ПСА используют задатчики. Подробнее...
Дискретные сигналы в ПСА формируют с помощью пневмокнопок и тумблеров. Подробнее...
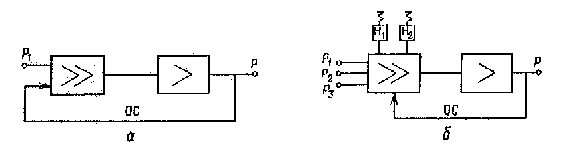
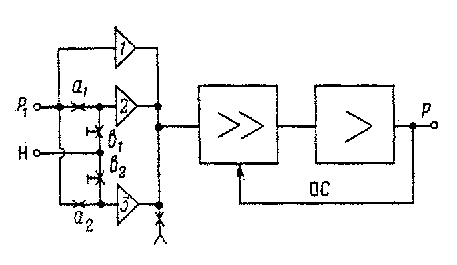
Пневмокнопки используют и как конечные выключатели (элемент П1ВК. 1). Устройства ПСА К устройствам, состоящим из нескольких элементов, условно относят мощные повторители, интеграторы, умножители, дифференциаторы, сумматоры, селекторы, квадраторы и т.п. Некоторые из этих устройств конструктивно оформлены как единое изделие (например, сумматоры, дифференциаторы и т.д.), другие устройства (интеграторы, генераторы и т.п.) используют только как составные части приборов и регуляторов. Точные мощные повторители строят на базе повторителя типа П2П.7 и оформляют как самостоятельное изделие, либо конструируют на основе двухвходового усилителя давления и грубого повторителя, охваченных отрицательной обратной связью ОС (рис.1.18, а). Такой повторитель ПП1.5 имеет класс точности 0,5 и обеспечивает расход воздуха 180- 200 л/ч. Устройство алгебраического суммирования типа ПФ1.1М1 реализует с погрешностью 1% зависимость P=P1-Р2+Р3-H1+Н2, где Р1-Р3 - входные сигналы, H1, Н2 - опорные давления из интервала (20 -100) кПа. В состав устройства (рис.1.18, б) входят семимембранный элемент сравнения, усилитель мощности, два задатчика и линия обратной связи ОС.
Умножители
сигнала на константу k
с погрешностью 0,5% выполняют операцию
P=k(P1-H)+H,
где k Простейший интегратор реализуют с помощью глухой камеры с постоянной времени Г и ламинарным ПС. Он не имеет обратной связи и обеспечивает приемлемую точность только при малых (по сравнению с Т) значениях времени интегрирования.
Рис.1.18. Схемы пневматических устройств: а - точного мощного повторителя; б - мембранного сумматора.
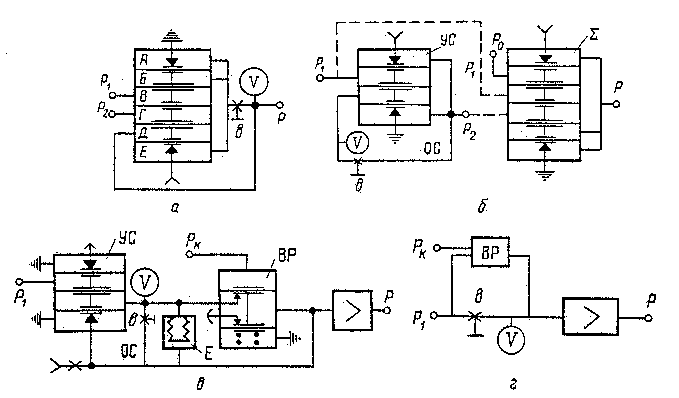
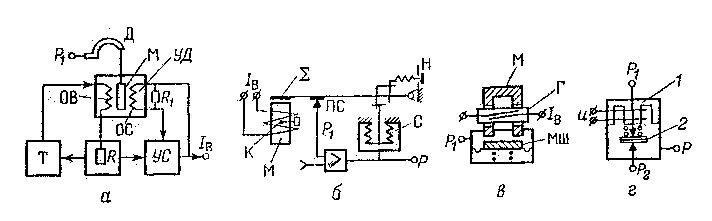
Рис.1.19. Схема устройства умножения на константу. Чаще всего интеграторы строят на базе мембранного сумматора и глухой камеры объема V, охваченных положительной обратной связью (рис.1.20, а). Динамическая характеристика интегратора
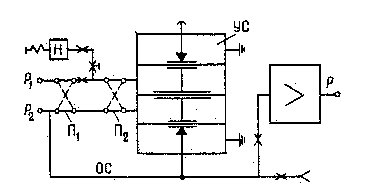
Устройства дифференцирования строят на основе трехмембранного усилителя УС, охваченного отрицательной обратной связью ОС с глухой камерой (рис.1.20, б). Динамическая характеристика устройства дифференцирования
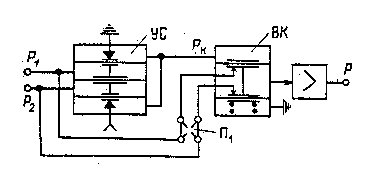
Рис.1.20. Схемы пневматических устройств: а - интегратора; б - дифференциатора; в - прямого предварения; г - обратного предварения. Серийное устройство прямого предварения типа ПФ2.1 (рис.1.20, в) снабжено выключающим реле ВР (позволяющим при Рк=0 блокировать действие дифференциатора) и точным мощным повторителем П2П.7. Для ослабления автоколебаний, возникающих в контуре "УС-ОС", в устройстве используют емкость Е с сильфоном. Динамическая характеристика устройства прямого предварения
Устройство обратного предварения типа, ПФ3.1 (рис.1.20, г) реализует теоретический закон P(t) = P1(t) - TпP(t), где параметр Тп варьируют от 3 до 6000 с регулируемым дросселем «в». Селекторы в ПСА служат для выбора наибольшего (наименьшего) сигнала из двух сравниваемых P1 и Р2. Селектор типа ПФ 4/5.1 (рис.1.21) состоит из усилителя давления УС, выключающего реле ВК, усилителя мощности П2П.7 и переключателя П1. Если P1 >Р2, то Рк=0, и сигнал Р1 поступает через ВК и усилитель на выход. Для настройки селектора на выбор меньшего давления в переключателе П1 каналы коммутируют в соответствии с пунктирными линиями. Устройство ограничения сигналов типа ПП11.1 служит для ограничения сверху (снизу) входного давления Р1; конструктивно это устройство аналогично селектору ПФ 4/5.1, однако вместо сигнала Р2 вводят постоянное давление Н от задатчика. Тогда ПП11.1 реализует операцию: Р= Р1 при Р1<Н и Р=Н при Р1>Н. Устройство извлечения квадратного корня (квадратор) типа ПФ1.17 предназначен для реализации с погрешностью 1% функции Р=[80 (Р1-Н)]0,5+ Н. Подробнее о функционировании устройства извлечения квадратного корня
Рис.1.21. Схема селектора: 1 - элемент сравнения; 2 - выключающее реле; 3 - усилитель мощности; 4 - переключатель.
Рис.1.22. Схема квадратора.
Рис.1.23. Схемы устройства преобразования рода сигнала: а - пневмоэлектрический преобразователь ППЭ-2; б - электропневматический преобразователь ЭП-0000; в - герконовый преобразователь типа ППЭД.1; г - преобразователь типа П1ПР.5. Преобразователи пневмоэлектрические и электропневматические предназначены для преобразования рода энергии непрерывных сигналов. Преобразователь типа ППЭ-2 преобразует с погрешностью 1% пневматический сигнал в сигнал постоянного тока 0-5, 0-20 или 4-20 (при нагрузке на выходе не более 2,5 кОм). Принципиальная схема преобразователя
Перечень элементов и устройств ПСА
Преобразователь ЭП-0000 преобразует электрические сигналы 0-5, 0-20 или V 4-20 мА в давление воздуха 20-100 кПа. Схема и работа преобразователя ЭП-0000
Для преобразования рода энергии дискретных сигналов применяют пневмоэлектрические преобразователи типов ППЭД-1, ППЭД-2 (сконструированные на базе одномембранных элементов микропереключателей и магнитоуправляемых герметичных контактов - герконов) и электропневматические преобразователи П1ПР.5 и ПЭПД (построенные на основе переменного ПС сопло - заслонка 2 и электромагнита 1). Выходами (входами) этих преобразователей служат сигналы уровня О или 24 В постоянного тока. Схемы преобразователей ППЭД.1 и П1ПР.5 приведены на рис.1.23, в, г. Основные серийно выпускаемые элементы и функционально простые устройства ПСА приведены в табл. 2.1. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||