

Принципы автоматического регулирования
П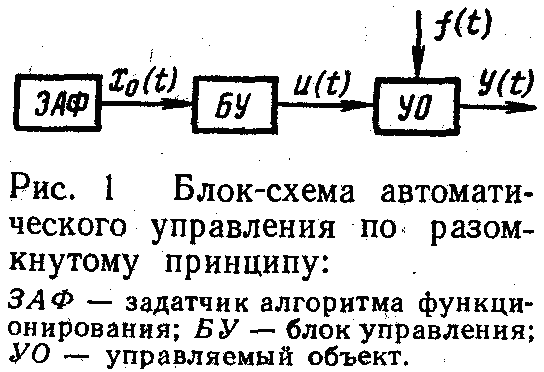 ринцип
разомкнутого управления заключается
в том, что алгоритм управления строится
только на основе алгоритма
функционирования путем выбора законов,
определяющих действие управляющего
устройства с учетом свойств управляемого
объекта.
ринцип
разомкнутого управления заключается
в том, что алгоритм управления строится
только на основе алгоритма
функционирования путем выбора законов,
определяющих действие управляющего
устройства с учетом свойств управляемого
объекта.
Здесь не учитывается фактическое значение управляемой величины и действие возмущений. Алгоритм функционирования может задаваться отдельным устройством — задатчиком алгоритма функционирования (ЗАФ) или заложен в конструкцию блока управления (БУ). Тогда ЗАФ может вообще отсутствовать.
П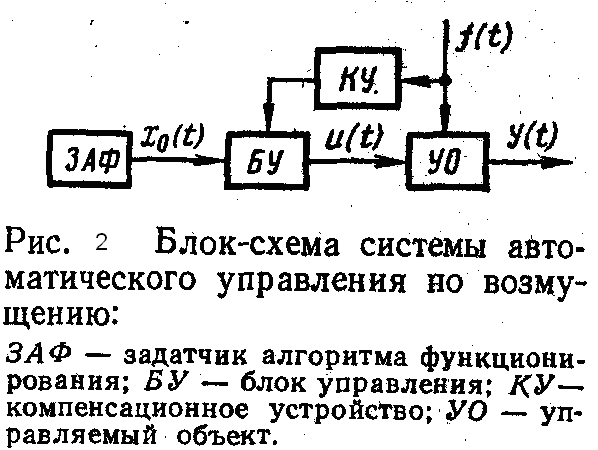
 ринцип
компенсации (управление по возмущению)
Сущность
его заключается в том, что управляющее
устройство формирует управляющее
воздействие таким образом, чтобы
компенсировать действие возмущения
на УО. Этот принцип позволяет компенсировать
действие возмущения, которое может
быть измерено, причем для каждого вида
возмущения необходимо использовать
отдельное компенсирующее устройство.
ринцип
компенсации (управление по возмущению)
Сущность
его заключается в том, что управляющее
устройство формирует управляющее
воздействие таким образом, чтобы
компенсировать действие возмущения
на УО. Этот принцип позволяет компенсировать
действие возмущения, которое может
быть измерено, причем для каждого вида
возмущения необходимо использовать
отдельное компенсирующее устройство.
П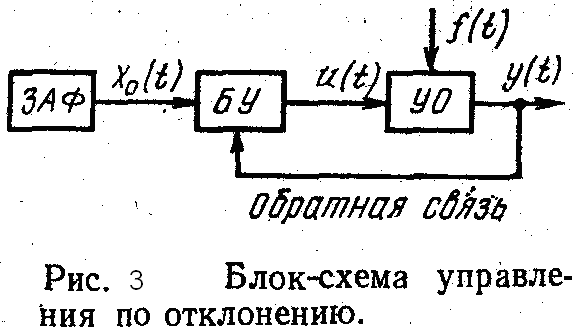 ринцип
управления по отклонению.
Сущность принципа заключается в том,
что управляющее воздействие
формируется только при отклонении
управляемой величины от заданного
ее значения. Алгоритм управления u(t)
формируется
блоком управления БУ
после
сравнения заданного алгоритма
функционирования блоком ЗАФ
и фактического
значения выходной величины управляемого
объекта. Для этой цели в схему вводится
дополнительная связь с выхода управляемого
объекта в БУ.
Эта связь
называется цепью обратной
связи, так
как по ней передается сигнал в обратном
направлении с выхода объекта в блок
управления.
ринцип
управления по отклонению.
Сущность принципа заключается в том,
что управляющее воздействие
формируется только при отклонении
управляемой величины от заданного
ее значения. Алгоритм управления u(t)
формируется
блоком управления БУ
после
сравнения заданного алгоритма
функционирования блоком ЗАФ
и фактического
значения выходной величины управляемого
объекта. Для этой цели в схему вводится
дополнительная связь с выхода управляемого
объекта в БУ.
Эта связь
называется цепью обратной
связи, так
как по ней передается сигнал в обратном
направлении с выхода объекта в блок
управления.
Цепь обратной связи как бы замыкает контур управления, поэтому такое управление носит название управления по замкнутому контуру.
Схемы автоматизации
Назначение схем автоматизации и общие принципы их выполнения
С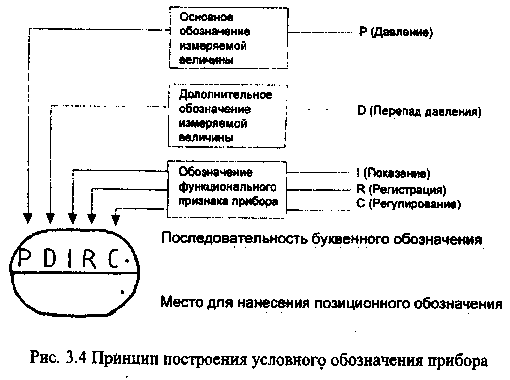 хема
автоматизации —
основной
технический документ, определяющий
функционально-блочную структуру
отдельных узлов автоматического
контроля, управления и регулирования
технологическим процессом и оснащение
объекта управления приборами и средствами
автоматизации (определяющий структуру
и функциональные связи между
технологическим процессом и средствами
автоматизации).
хема
автоматизации —
основной
технический документ, определяющий
функционально-блочную структуру
отдельных узлов автоматического
контроля, управления и регулирования
технологическим процессом и оснащение
объекта управления приборами и средствами
автоматизации (определяющий структуру
и функциональные связи между
технологическим процессом и средствами
автоматизации).
Согласно ГОСТ 21. 408-93 на схеме автоматизации изображают:
1. Техническое и инженерное оборудование и коммуникации (трубопроводы, газоходы, воздуховоды) автоматизируемого объекта;
2. Технические средства автоматизации или контуры контроля, регулирования и управления (контур — совокупность отдельных функционально связанных приборов, выполняющих определенную задачу по контролю, регулированию, сигнализации, управлению и т.д.);
3. Линии связи между отдельными техническими средствами автоматизации или контурами (при необходимости).
Также при необходимости на поле чертежа даются пояснения и таблица условных обозначений, не предусмотренных действующими стандартами.
Изображение технологического инженерного оборудования и коммуникаций на схемах автоматизации
Технологическое оборудование и коммуникации должны изображаться, как правило, упрощенно, без указания отдельных технологических аппаратов и трубопроводов вспомогательного назначения, но технологическая схема должна давать ясное представление о принципе ее работы и взаимодействии со средствами автоматизации.
Согласно стандарту устанавливаются два метода построения условных обозначений: а) упрощенный; б) развернутый.
При упрощенном методе построения приборы и средства автоматизации, осуществляющие сложные функции, например, контроль, регулирование, сигнализацию и выполненные в виде отдельных блоков изображают одним условным обозначением. При этом первичные измерительные преобразователи и всю вспомогательную аппаратуру не изображают.
П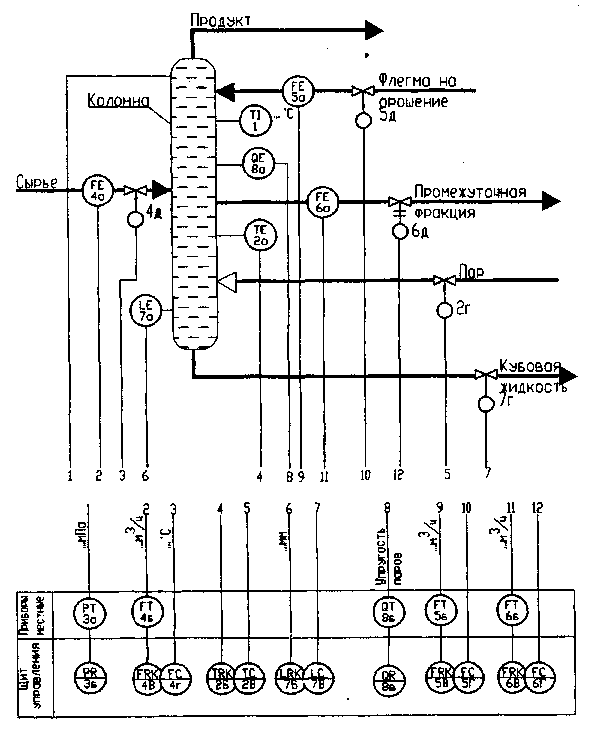 ри
развернутом
методе
построения каждый прибор или блок,
входящий в единый измерительный,
регулирующий или управляющий комплект
средств автоматизации, указывают
отдельным условным обозначением.
ри
развернутом
методе
построения каждый прибор или блок,
входящий в единый измерительный,
регулирующий или управляющий комплект
средств автоматизации, указывают
отдельным условным обозначением.
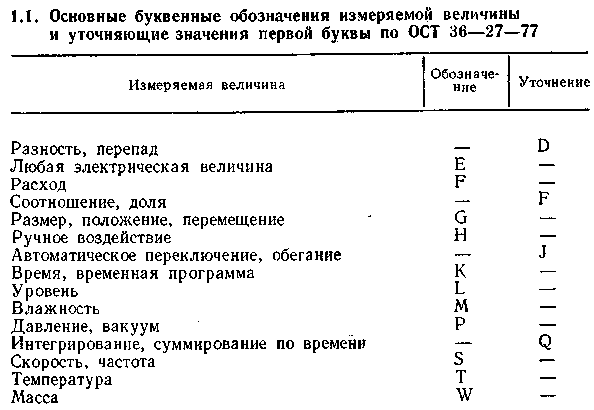
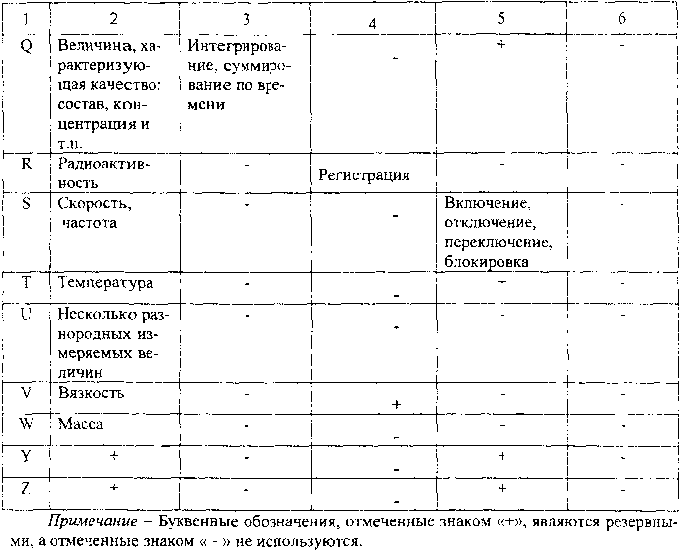
В верхней части графического обозначения наносят буквенные обозначения измеряемой величины и функционального признака прибора, определяющего его назначение.
При построении буквенных обозначений указывают не все функциональные признаки прибора, а лишь те, которые используют в данной схеме.
Б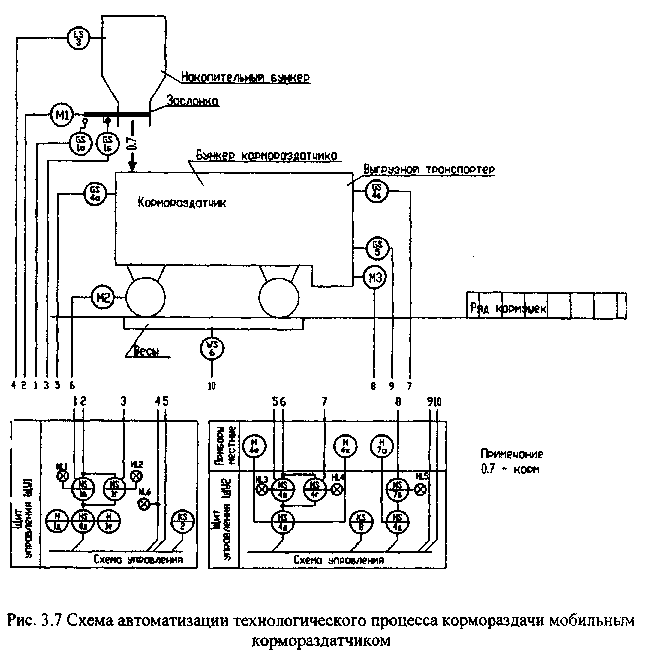 укву
А применяют
для обозначения функции «сигнализация»
независимо от того, вынесена ли
сигнальная аппаратура на какой-либо
щит или для сигнализации используются
лампы, встроенные в сам прибор.
укву
А применяют
для обозначения функции «сигнализация»
независимо от того, вынесена ли
сигнальная аппаратура на какой-либо
щит или для сигнализации используются
лампы, встроенные в сам прибор.
Букву S применяют для обозначения контактного устройства прибора, используемого только для включения, отключения, переключения, блокировки.
Принцип построения условного обозначения прибора приведен на рис. 3.4.
Во избежание разночтений буквы «3» и «О», имеющих начертание, похожее на начертание цифр, применять не допускается.
Каждая связь между техническими средствами автоматизации, расположенными по месту и в щитах, обозначается одной линией независимо от фактического числа проводов или труб, осуществляющих эту связь (см, табл. 3.2).
К условным обозначениям приборов и средств автоматизации для входных и выходных сигналов линии связи допускается подводить с любой стороны, в том числе сбоку и под углом.
Линии связи допускается изображать с разрывом при большой протяженности и (или) при сложном их расположении (смотрите примеры чертежей). Места разрывов линий связи нумеруют арабскими цифрами в порядке их расположения в прямоугольнике с заголовком «Приборы местные».
Рис.3.5 Пример выполнения схемы автоматизации развернутым способом
Д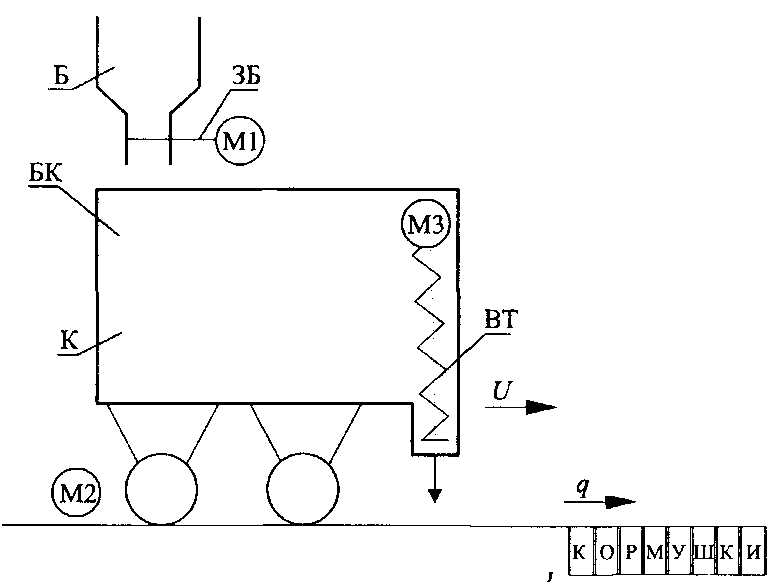 опускается
пересечение линий связи с изображениями
технологического оборудования.
Пересечение линий связи с обозначениями
приборов не допускается. При необходимости
указания направления передачи
сигнала на линиях связи допускается
наносить стрелки.
опускается
пересечение линий связи с изображениями
технологического оборудования.
Пересечение линий связи с обозначениями
приборов не допускается. При необходимости
указания направления передачи
сигнала на линиях связи допускается
наносить стрелки.
Схемы автоматизации выполняют двумя способами:
1) развернутым, при котором на схеме изображают состав и место расположения технических средств автоматизации каждого контура контроля и управления. Пример выполнения схемы по первому варианту приведен на рис. 3.5;
2) упрощенным, при котором на схеме изображают основные функции контуров контроля и управления (без выделения входящих в них отдельных технических средств автоматизации и указания места расположения).
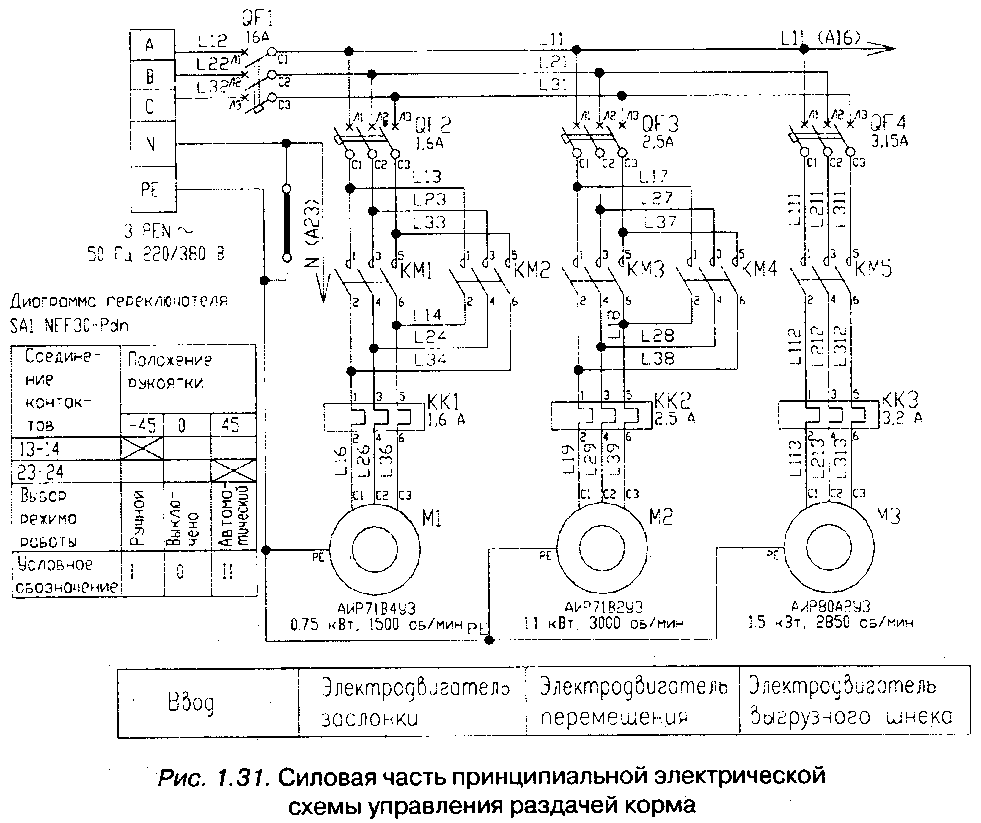
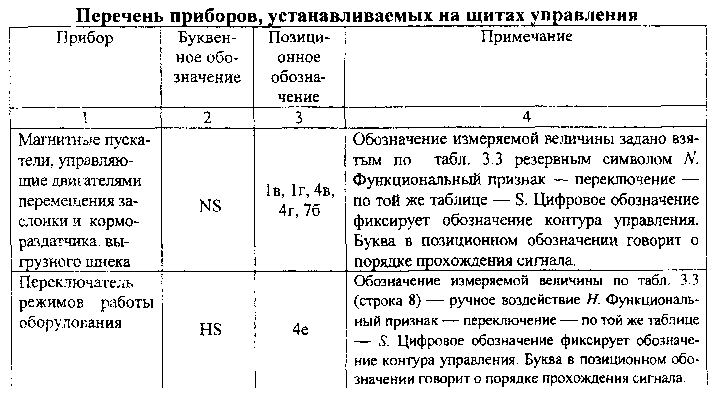
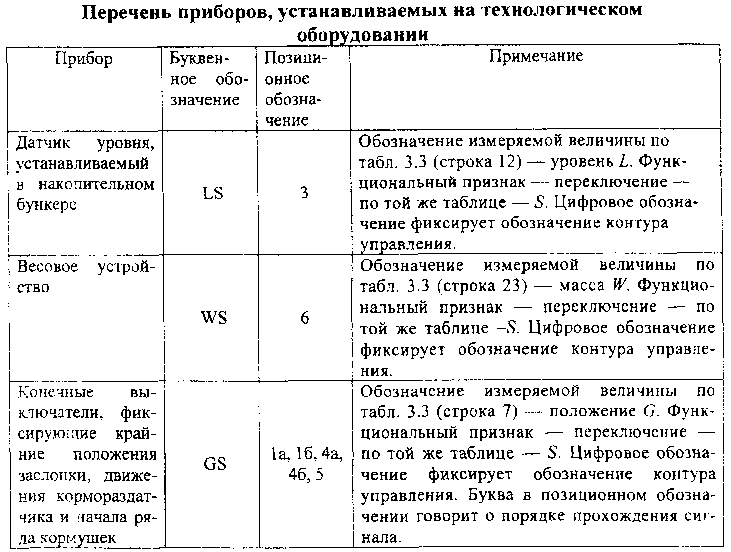
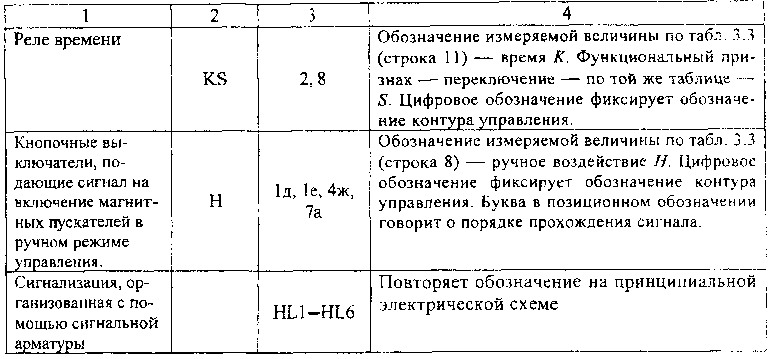
На схеме автоматизации технологических процессов приводится техническое решение варианта автоматизации. Например, при разработке варианта автоматизации линии раздачи корма мобильным кормораздатчиком (изображение технологического оборудования линии приведено на рис. 3.3) было принято следующее решение.
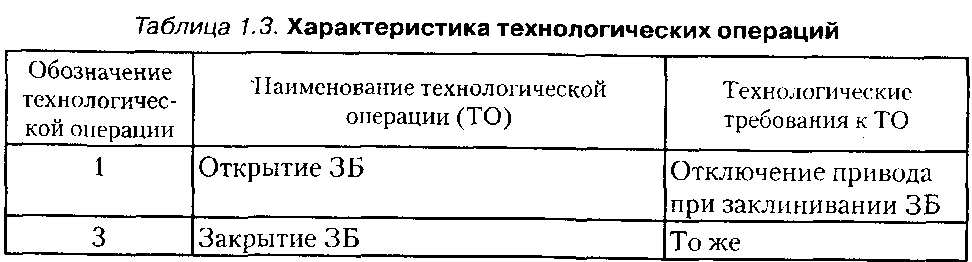
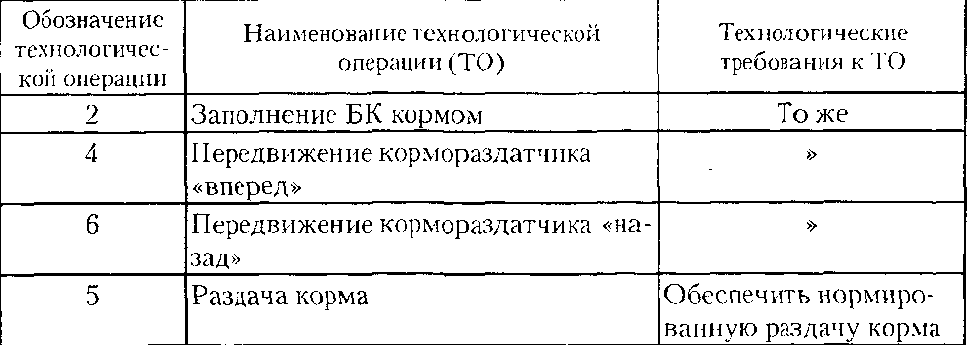
Для начала процесса загрузки мобильного кормораздатчика должно быть зафиксировано то, что кормораздатчик находится в исходном положении (с помощью конечного выключателя), и что в накопительном бункере имеется корм (с помощью датчика уровня). Далее открывается заслонка (ее конечные положения тоже фиксируются) и по весу производится загрузка кормораздатчика. После этого по сигналу реле времени производится кормораздача в ряд кормушек. Включение и отключение выгрузки корма обеспечивается с помощью конечных выключателей, фиксирующих начало и конец кормушек. Перечень приборов для данного варианта автоматизации приведен в табл. 3.6 и 3.7.
П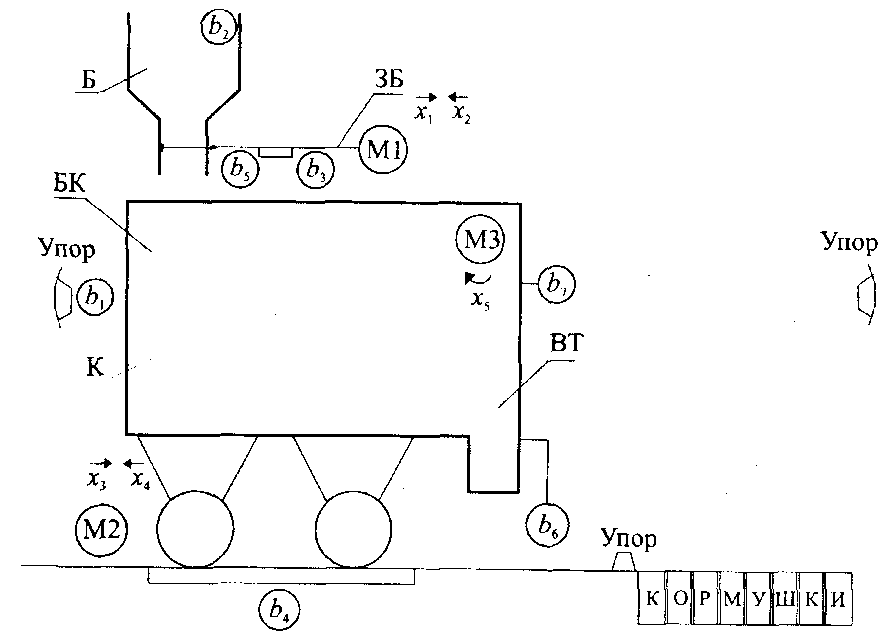 ервым
шагом синтеза САУ ТП является словесное
описание алгоритма функционирования
технологической
линии, составляемое обычно совместными
усилиями технологов, конструкторов и
проектировщиков. В ходе разработки
задания на проектирование определяют
последовательность работы исполнительных
органов технологической линии,
обеспечивающих эффективность функций
управления, основными из которых
являются безопасность работы объекта
и правильное выполнение технологического
процесса. Качественные показатели
работы оборудования технологической
линии определяются и корректируются
на втором этапе проектирования.
ервым
шагом синтеза САУ ТП является словесное
описание алгоритма функционирования
технологической
линии, составляемое обычно совместными
усилиями технологов, конструкторов и
проектировщиков. В ходе разработки
задания на проектирование определяют
последовательность работы исполнительных
органов технологической линии,
обеспечивающих эффективность функций
управления, основными из которых
являются безопасность работы объекта
и правильное выполнение технологического
процесса. Качественные показатели
работы оборудования технологической
линии определяются и корректируются
на втором этапе проектирования.
Пример. Рассмотрим словесное описание цикла работы линии раздачи корма с помощью мобильного рельсового кормораздатчика (рис. 1.5).
Рис. 1.5. Технологическая схема мобильного кормораздатчика: Б — накопительный бункер; ЗБ — электродвигательная заслонка; К — мобильный кормораздатчик; БК — бункер кормораздатчика; ВТ — выгрузной транспортер; М1 — привод ЗБ; М2 — привод К; МЗ — привод ВТ; U — скорость передвижения К; О — производительность ВТ; l — длина одной кормушки; q — норма одного рациона корма
Линия раздачи корма состоит из бункера Б с электродвигательной заслонкой ЗБ; кормораздатчика К, имеющего накопительный бункер БК, оборудованный шнековым транспортером ВТ. Перемещение К осуществляется реверсивным электроприводом М2.
Включают линию в работу по заданной программе контакты суточного реле времени. Включение контактов кратковременное. Если контакты включены, корм в Б имеется и К находится под Б, открывается ЗБ и происходит загрузка БК. При загрузке БК до нормы ЗБ закрывается, привод К включается и он перемещается к началу кормушек, где включается привод ВТ и происходит раздача корма. В конце кормушки К останавливается, привод ВТ выключается, с выдержкой времени включается реверс привода К и он перемещается в исходное положение под Б.
Для формализации алгоритма управления необходимо определить тип и количество командных аппаратов таким образом, чтобы обеспечить выполнение требований функционирования оборудования технологической линии, т.е. срабатывания командных аппаратов и исполнительных механизмов должны составлять непрерывную логическую цепочку.
Для формализации алгоритма ТП применим следующие буквенные обозначения:
♦ а1 а2, а3..., ап — исполнительные элементы командных приборов ручного воздействия;
♦ в1 в2, в3 ..., вn — исполнительные элементы командных приборов технологического воздействия;
♦ х1, х2, х3 ..., хп — воспринимающие элементы исполнительных устройств;
♦ Z1, Z2, Z3..., Zn — катушки (или привода) реле времени;
♦ z'1, z'2, z'3..., z'n - исполнительные элементы реле времен (как командного прибора);
♦ z'c — контакт суточного реле времени.
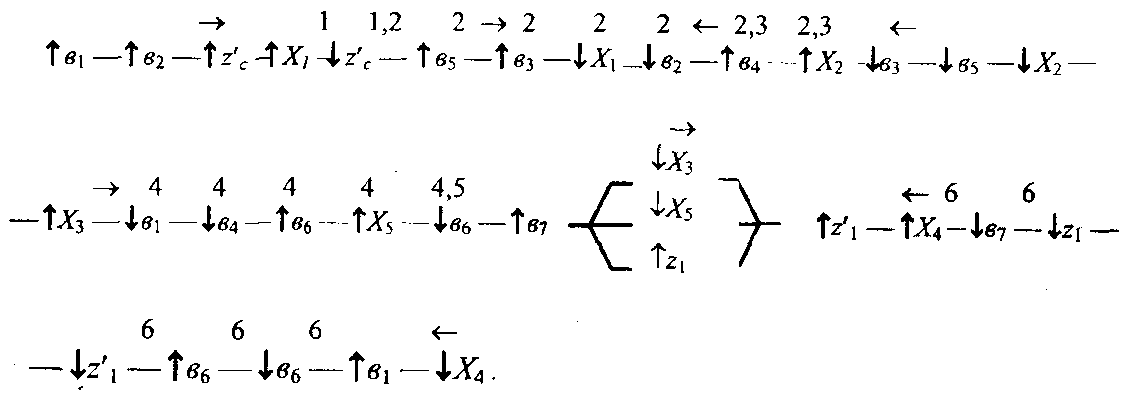
Следующим шагом в направлении алгоритмизации САУ ТП является описание его с помощью символов.
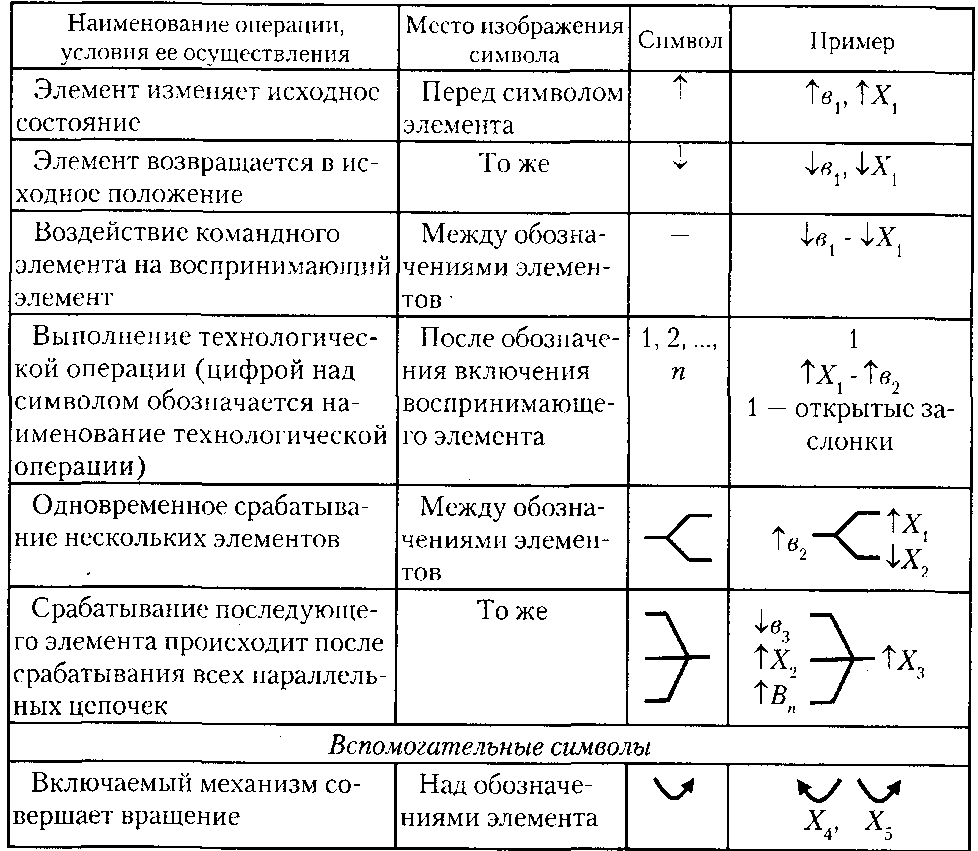
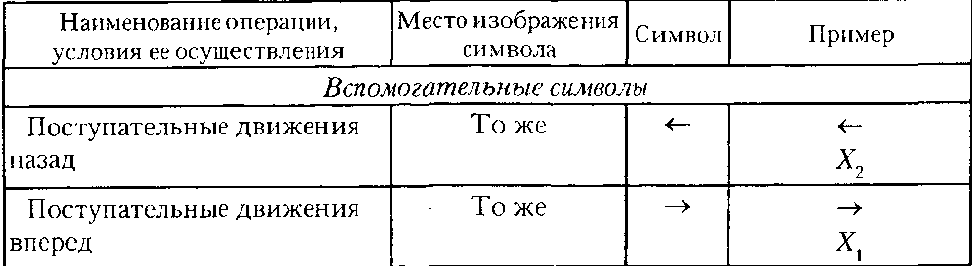
В табл. 1.1 приведены символы, обозначающие определенные действия, операции, состояния элементов САУ, вспомогательные обозначения, позволяющие связать отдельные элементы в цепочку причинно-следственных связей.
В соответствии с технологией раздачи корма кормораздатчик предварительно должен быть заполнен кормом из бункера Б. Заполнение БК кормом производится путем открытия заслонки ЗБ. Естественно, открытие ЗБ должно производиться, когда К находится под Б, иначе произойдет просыпание корма на пол. Для контроля положения К под Б используем элемент в1
Открытие ЗБ должно произойти при наличии корма в Б, в противном случае должна сработать сигнализация о нарушении технологического процесса. Для контроля наличия корма в Б используем элемент в2 .Имеет значение место установки датчика уровня в бункере — он должен контролировать наличие в бункере корма минимум на один цикл работы кормораздатчика. Если корма в Б будет меньше чем на одну дачу, прервется цепочка причинно-следственных связей (не сработает датчик загрузки К) и технологический процесс прервется.
При выполнении вышеуказанных условий и замыкании контакта суточного реле времени срабатывает привод Х1, открывая ЗБ. Ограничивает открытие ЗБ конечный выключатель в3. Привод Х2 закрывает ЗБ. Ограничивает закрытие ЗБ конечный выключатель в5 При заполненном БК и закрытой ЗБ включается привод Х3 кормораздатчика, который перемещается к началу кормушек, где посредством срабатывания конечного выключателя в6 включается привод Х5 выгрузного транспортера. Кинематика срабатывания конечного выключателя в6 зависит от конструкции упора, воздействующего на в6. При коротком упоре (рис. 1.6, а) происходит срабатывание в6, включение Х5 и затем обратное срабатывание контакта вв. Отключение Х5 производится уже срабатыванием другого командного аппарата. Отключение приводов Х3 и Х5 и возврат К в исходное положение (привод Х4) производится срабатыванием контакта в7 конечного выключателя.
Таблица 1.2. Буквенное обозначение командных приборов и исполнительных устройств
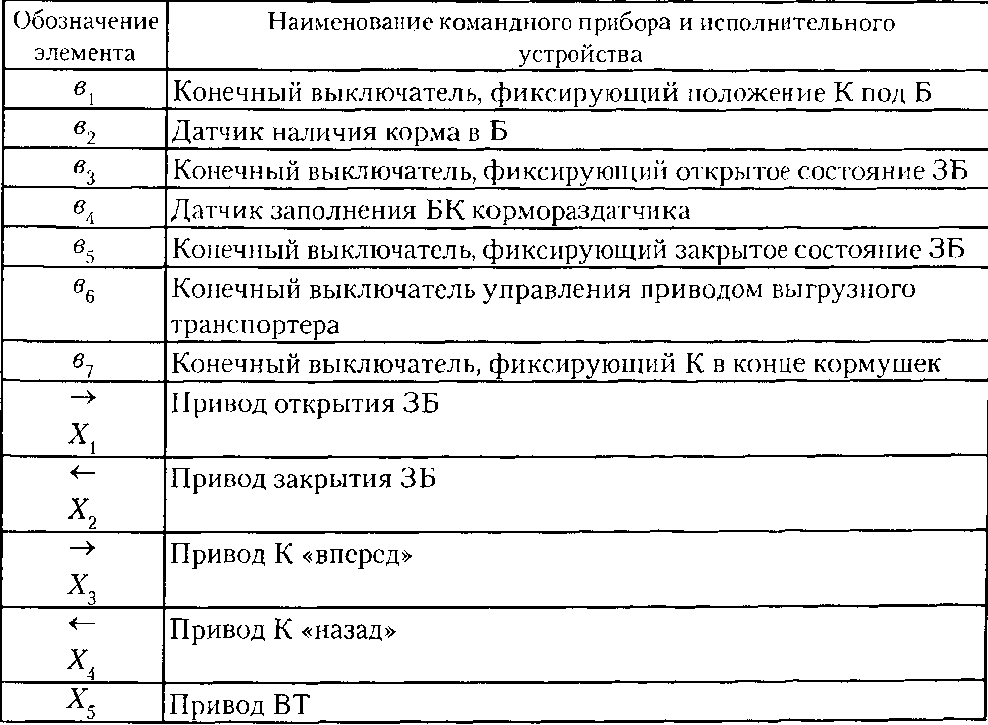
В приведенном примере каждый из реверсивных электродвигателей М1 и М2 рассматривается как два исполнительных органа (X1, Х2) и (Х3 Х4) соответственно.
Рис. 1.7. Схема расположения командных приборов и исполнительных устройств
на объекте управления
Примечания: 1. Элементы САУ имеют два состояния (контакт замкнут — разомкнут, исполнительный механизм включен — отключен) и символы (,), которые обеспечивают обозначение состояния элементов.
2. Вспомогательные символы облегчают чтение алгоритма, однако нанесение их необязательно.
3. Наименование технологических операций и требования к ним приводятся дополнительно при разработке алгоритма.
Записи алгоритма с помощью символов должны предшествовать обоснование и выбор командных приборов. При этом следует придерживаться основных принципов:
1) количество командных приборов должно быть таким, чтобы можно было составить логическую цепочку причинно-следственных связей работы САУ ТП;
2) САУ ТП должна строиться на базе серийно выпускаемых приборов;
3) приборы должны наиболее полно отвечать предъявляемым требованиям и условиям работы автоматизируемого объекта;
4) установка приборов не должна влиять на ход технологического процесса и обеспечивать бесперебойность работы оборудования в течение минимум одного цикла;
5) должна быть проработана кинематика взаимодействия первичного преобразователя командного прибора с объектом. В качестве датчика уровня в2 можно использовать мембранные и флажковые датчики уровни (СУМ-1, СУМ-1-01, СУ-1Ф), в качестве датчика заполнения кормораздатчика в4 — весовое устройство.
Используя словесное описание технологического процесса и принятые обозначения, составим запись алгоритма для нашего примера:
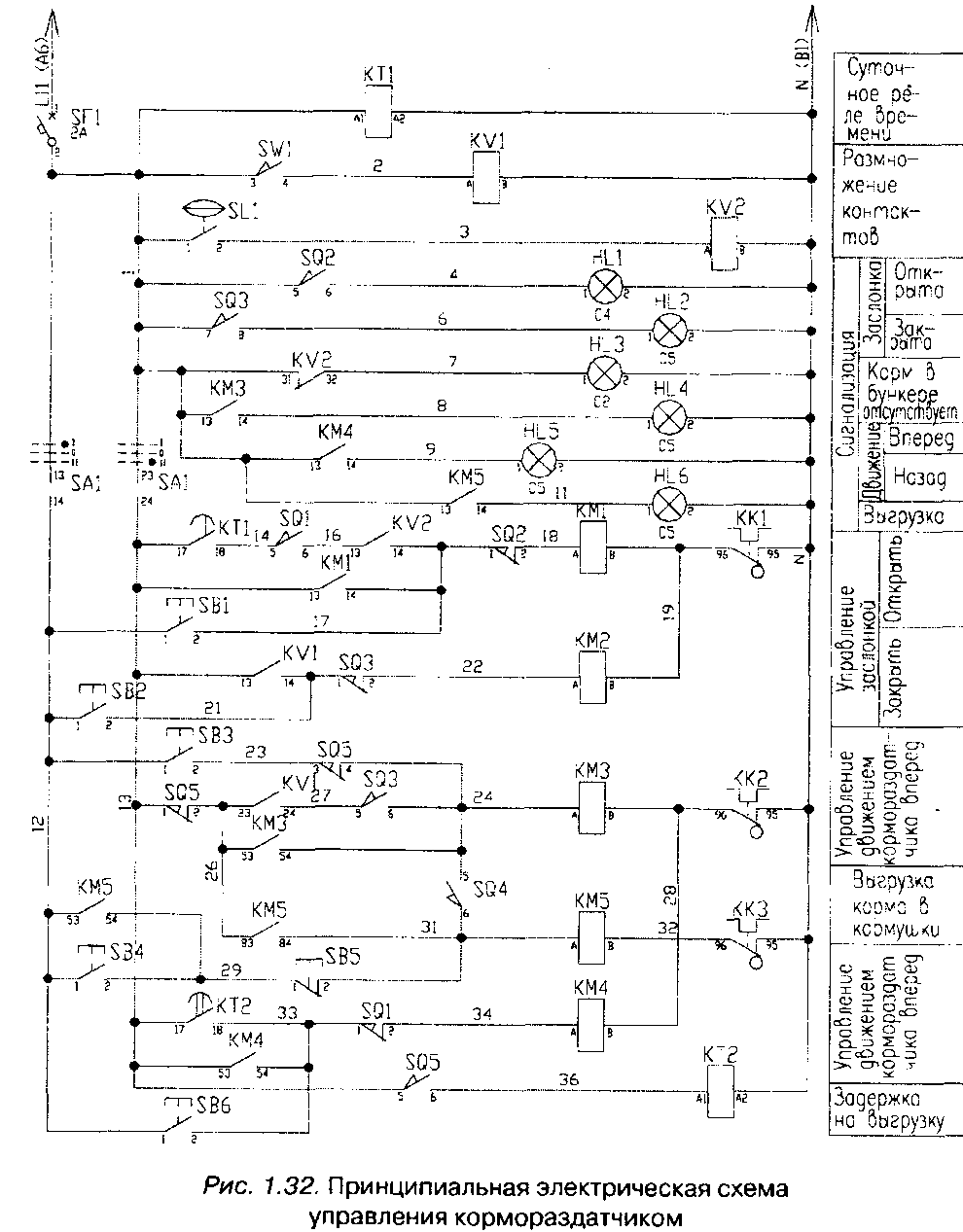
Принципиальная электрическая схема управления разрабатывается в соответствии с алгоритмом управления технологическим процессом и дополняется типовыми принципиальными схемами регулирования, защиты и сигнализации.
Полная принципиальная схема служит основанием для разработки монтажных таблиц щитов и пультов, схем соединений внешних проводок и других документов проекта. Принципиальными схемами пользуются для изучения принципов работы изделий, а также при их наладке, контроле и ремонте. Для концентрации внимания на принципах автоматического управления в последующих разделах использован упрощенный вариант принципиальной схемы управления, в котором цепь ручного управления (кнопки пуска, остановки и блок-контакт магнитного пускателя) отдельным пускателем заменены условным блоком, обозначенным, например, Р2 (рис. 1.33).
На чертежах принципиальной электрической схемы системы автоматизации в общем случае должны изображаться все электрические элементы, необходимые для управления, регулирования, измерения, сигнализации, электропитания; контакты аппаратов данной схемы, занятые в других схемах, и контакты аппаратов других схем; диаграммы и таблицы включений, контактов переключателей, программных устройств, конечных и путевых выключателей, циклограммы работы аппаратуры; поясняющая технологическая схема, схема блокировочных зависимостей работы оборудования (при необходимости); необходимые пояснения и примечания; перечень элементов.
![]()
Графическое обозначение элементов и соединяющие их линии связи следует располагать на схеме таким образом, чтобы обеспечивать наилучшее представление о структуре изделия и взаимодействии его составных частей. Схемы выполняют для изделий, находящихся в отключенном положении. Расстояние между двумя соседними линиями графического изображения должно быть не менее 1 мм, между соседними параллельными линиями связи — 3 мм, между отдельными условными графическими обозначениями — 2 мм. Графические обозначения на схемах следует выполнять линиями той же толщины, что и линии связи (от 0,2 мм до 1,0 мм в зависимости от форматов схемы и размеров графических обозначений). Условные графические обозначения элементов изображают на схеме в положении, в котором они приведены в соответствующих стандартах, или повернутыми на угол, кратный 90°, если в соответствующих стандартах отсутствуют специальные указания. Существует несколько групп обозначений на чертеже принципиальной электрической схемы (рис. 1.34).
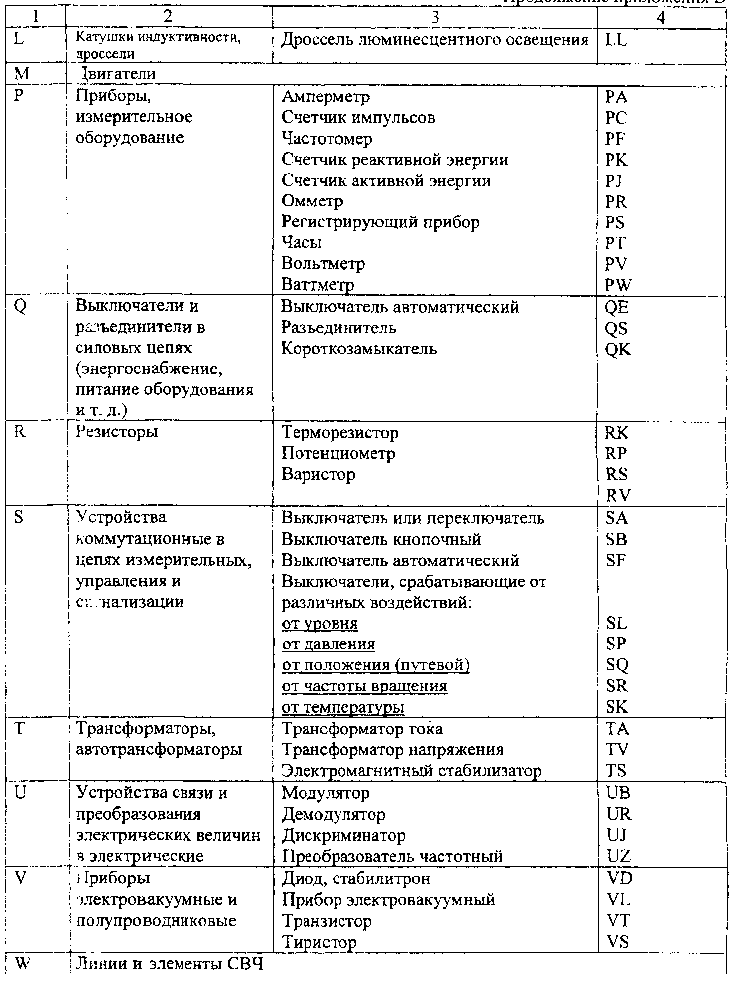
1. Позиционное обозначение. В общем случае состоит из 3 частей, указывающих вид элемента, его номер и функцию. Первые два являются обязательной частью обозначения и должны быть присвоены всем элементам и устройствам. Указание функции не является обязательным. В первой части записывают одну или несколько букв для указания вида элемента (приложение 1 ГОСТ 2.710-81), во второй части записывают одну или несколько цифр для указания номера элемента и в третьей (при необходимости) — одну или несколько букв функции элемента (приложение 2 ГОСТ 2.710-81). Позиционные обозначения проставляют на схеме рядом с условными графическими обозначениями элементов и устройств с правой стороны или над ними.
2. Обозначение электрического контакта. Для обозначения электрического контакта в общем случае используют комбинацию букв и цифр. Обозначение контакта должно повторять маркировку контакта, нанесенную на объекте или указанную в документации этого объекта. Если обозначение контактам присваивают при разработке объекта, то следует обозначить их номерами.
3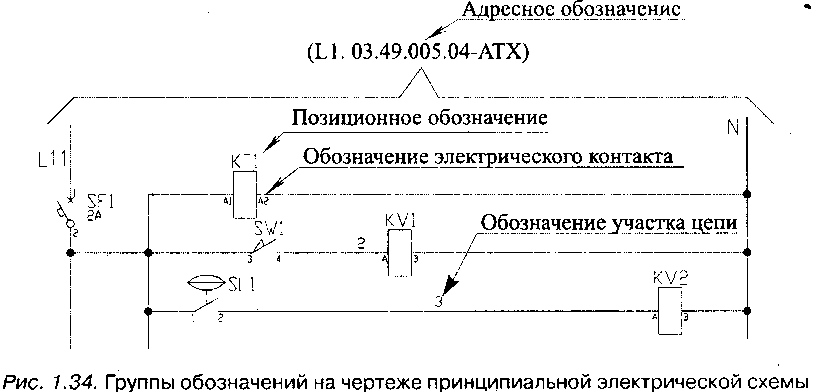 .
Обозначение
участков цепей. Обозначение
участков цепей в схемах служит для их
опознавания, может отражать их
функциональное назначение и создает
связь между схемой и устройством.
Участки цепи, разделенные контактами
аппаратов, обмотками машин, резисторами
и другими элементами, должны иметь
разное обозначение. Соединения,
проходящие через неразборные, разборные
и разъемные контактные соединения,
обозначают одинаково (допускаются в
обоснованных случаях разные обозначения).
Последовательность обозначения должна
быть, как правило, от ввода (источника
питания) к потребителю. Разветвляющиеся
цепи обозначают сверху вниз в направлении
слева направо. Для удобной ориентации
в схемах при обозначении участков цепей
допускается оставлять резервные номера
или некоторые номера пропусков.
.
Обозначение
участков цепей. Обозначение
участков цепей в схемах служит для их
опознавания, может отражать их
функциональное назначение и создает
связь между схемой и устройством.
Участки цепи, разделенные контактами
аппаратов, обмотками машин, резисторами
и другими элементами, должны иметь
разное обозначение. Соединения,
проходящие через неразборные, разборные
и разъемные контактные соединения,
обозначают одинаково (допускаются в
обоснованных случаях разные обозначения).
Последовательность обозначения должна
быть, как правило, от ввода (источника
питания) к потребителю. Разветвляющиеся
цепи обозначают сверху вниз в направлении
слева направо. Для удобной ориентации
в схемах при обозначении участков цепей
допускается оставлять резервные номера
или некоторые номера пропусков.
4. Адресное обозначение в общем случае состоит из трех частей: обозначение документа, с которым сопрягается данный документ; номер листа документа, с которым сопрягается данный лист документа; адрес другой части объекта (или ее изображение), с которой сопрягается данная часть объекта. Все части данного адресного обозначения записывают в указанном порядке и отделяют одну от другой точкой. Адресное обозначение применяется, например, для обозначения разрыва линий связи при переходе с листа на лист.
Данные об элементах принципиальной электрической схемы должны быть записаны в перечень элементов (рис. 1.35 и 1.36), который помещают на первом листе схемы или выполняют в виде самостоятельного документа и оформляют в виде таблицы, заполняемой сверху вниз. Элементы в перечень записывают группами в алфавитном порядке буквенно-позиционных обозначений, а в группах — по порядку номеров.
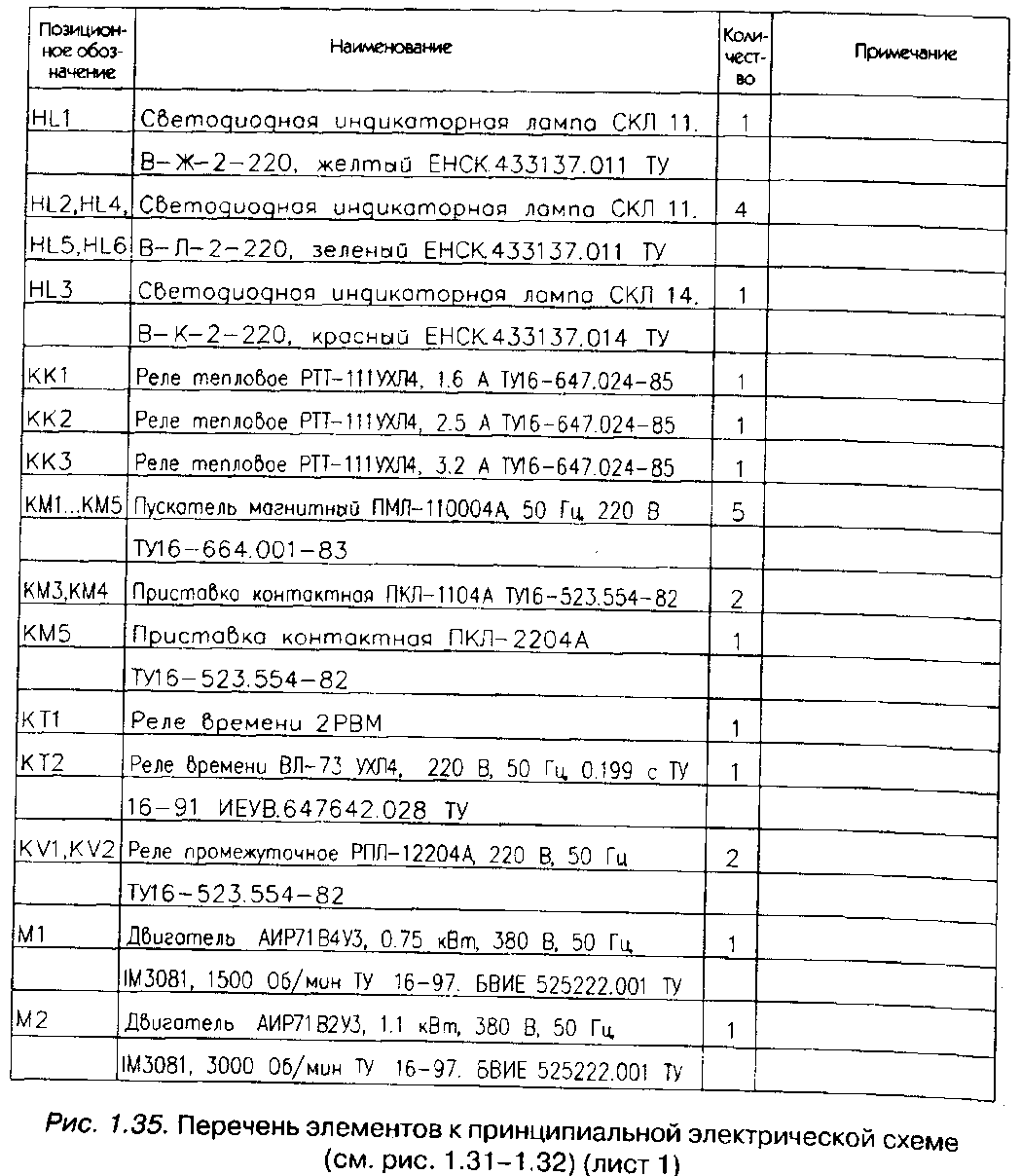
В графе «Позиционные обозначения» указывают позиционные обозначения элементов, устройств и функциональных групп; в графе «Наименование» — для элемента (устройства) — наименование в соответствии с документом, на основании которого этот элемент (устройство) применен, и обозначение данного документа (ГОСТ, ОСТ, ТУ), для функциональной группы — наименование; в графе «Примечание» рекомендуется указывать технические данные элемента (устройства), не содержащиеся в его наименовании.
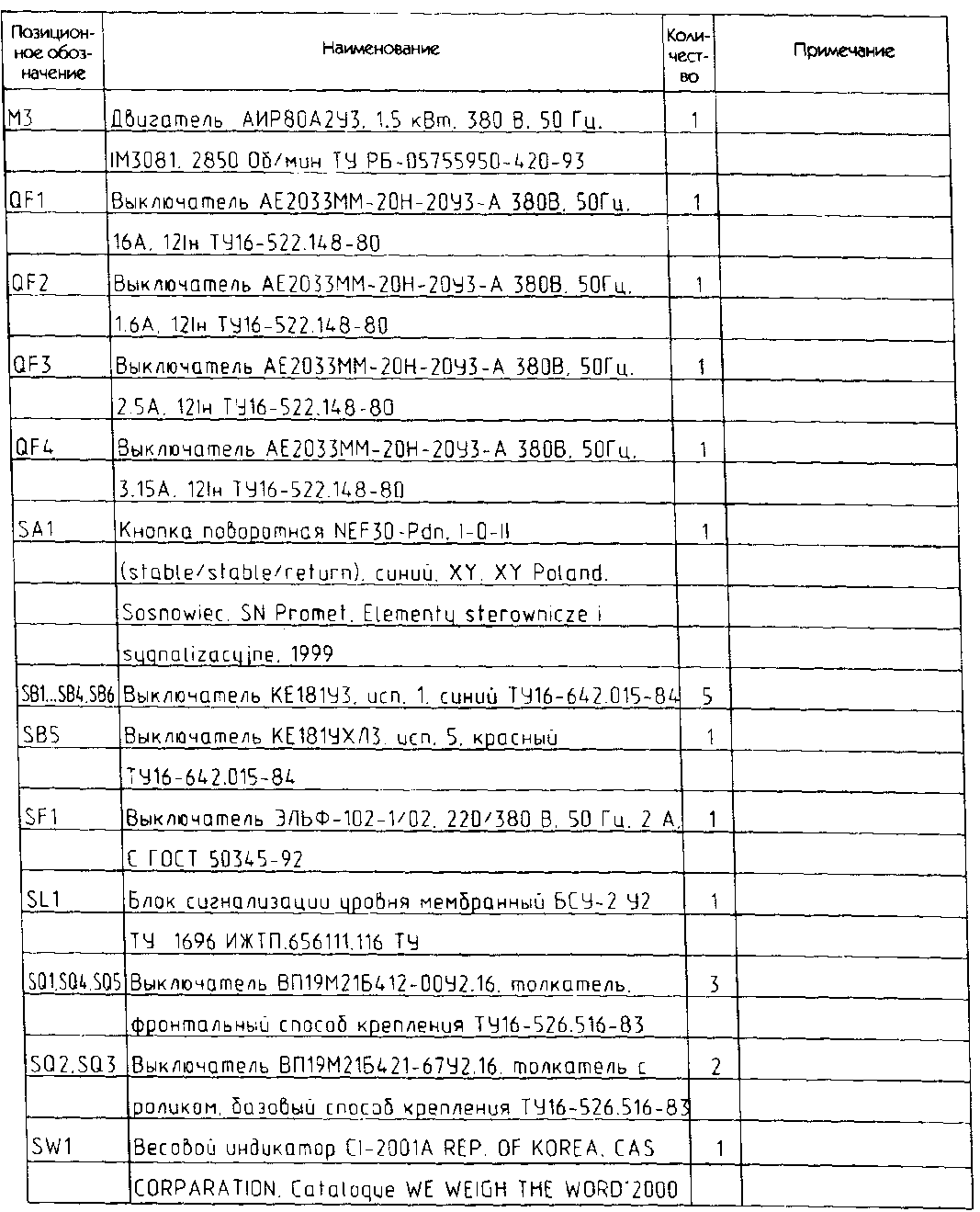
Рис. 1.36. Перечень элементов к принципиальной электрической схеме (лист 2)
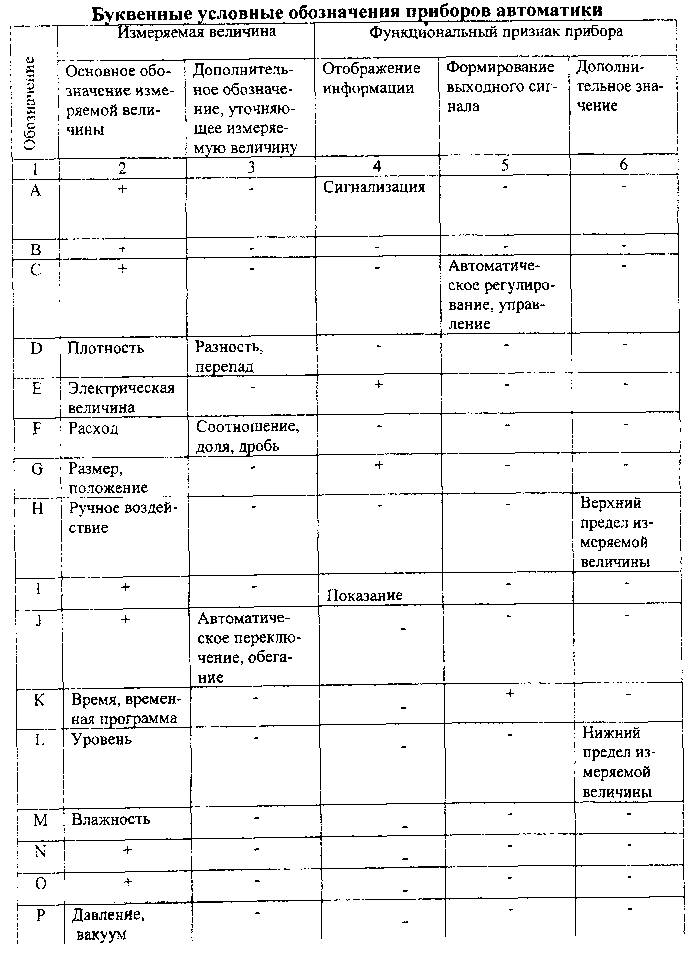
Таблица 1.1. Основные обозначения в символической записи алгоритма

Поточные линии. Требования, предъявляемые к поточным линиям.
Поточная линия – технологическая линия станков, машин и механизмов, взаимодействующих друг с другом в согласованном ритме, и предназначенная для непрерывного производства, изготовления чего либо.
Требования, предъявляемые к поточным линиям.
1 Перед пуском поточной линии необходимо подать звуковой или световой сигнал (для обеспечения безопасности обслуживающего персонала).
2 Электродвигатели всех машин и механизмов поточной линии включают в последовательности обратного движения продукта, а останавливают в последовательности совпадающей с движением продукта.
3 Для остановки всей поточной линии необходимо остановить механизм, обеспечивающий подачу продукта на поточную линию. Закрыть заслонку, шибер или затвор, затем с выдержкой времени отключить все машины полностью освободившиеся от продукта.
4 При аварийной остановке одной из машин, должны остановиться без выдержки времени все машины, работающие на ее загрузку, а с выдержкой времени машины, работающие на отгрузку.
5 Схемы должны обеспечивать не возможность неправильного отключения и включения эл. цепей.
6 Для устойчивой работы электропривода, а также во избежание недопустимых снижений напряжения во время каскадного включения электроприводов, схемы должны быть рассчитаны на предельно-допустимую мощность одновременно включаемых электроприводов.
7 С целью защиты от перегрузок, в схемах необходимо предусмотреть тепловые реле.
8 В схемах должны предусматриваться кнопки аварийного отключения линии в различных частях помещения.
№ п/п
|
Наименование и тип элемента
|
Обозначение по схеме
|
Число элементов ni
|
Интенсивность отказа номинальная 0i*10-6, 1/ч
|
Поправочный коэффициент Пki
|
Режим работы
|
Поправочный коэффициент аi
|
Интенсивность отказов действительная
|
||
Коэффициент нагрузки кН
|
Температура 0С
|
Для одного элемента аi*0i*10-6, 1/ч
|
Для n элементов ni*i*10-6, 1/ч
|
|||||||
1
2 3
4 5
6
7
8
9
10 |
Магнитный пускатель Реле времени Реле переменного тока
Звонок Пакетный переключатель Электромагнитный клапан Датчик давления Конечный выключатель Предохранитель Датчик уровня
|
КМ
КТ
KV
HA SA
YA
SP
QS
FU
SL |
6
2
4
1 8
1
2
2
1
1 |
10
20
6
0,25 14
10
5
14
0,7
2,5 |
1,03
1,03
1,03
1,03 1,03
1,03
1,03
1,03
1,03
1,03 |
1
1
1
1 1
1
1
1
1
1 |
20
20
20
20 20
20
20
20
20
20 |
1,1
1,1
1,1
1,1 1,1
1,1
1,1
1,1
1,1
1,1 |
11,33
22,66
6,8
0,28 15,86
11,33
5,67
15,86
0,79
2,8 |
67,98
45,32
27,2
0,28 126,88
11,33
11,34
31,72
0,79
2,8
|
|
|
|
|
|
|
|
|
|
|
= 325,64*10-6 1/ч |
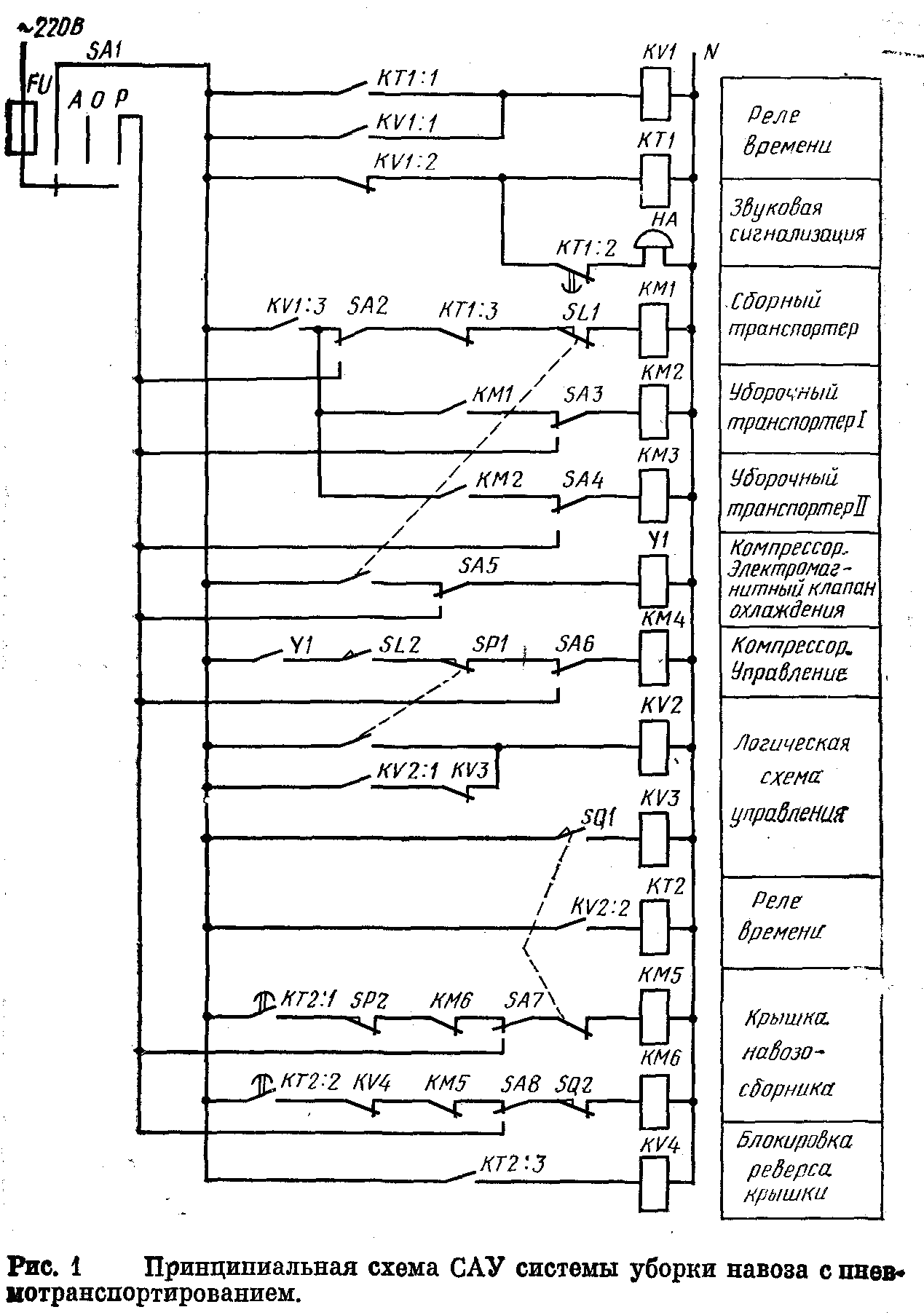
Вычертите схему управления системы уборки навоза с пневмотранспортированием. Произведите расчет надежности схемы управления и сделайте вывод.
Надёжность определяет свойство объекта, системы выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в определённых пределах, соответствующих заданным режимам и условиям использования, технического обслуживания, хранения, транспортирования.
Для определения надёжности автоматического управляющего устройства необходимо знать:
типы элементов входящих в схему;
число элементов каждого типа;
интенсивность отказов элементов, входящих в схему.
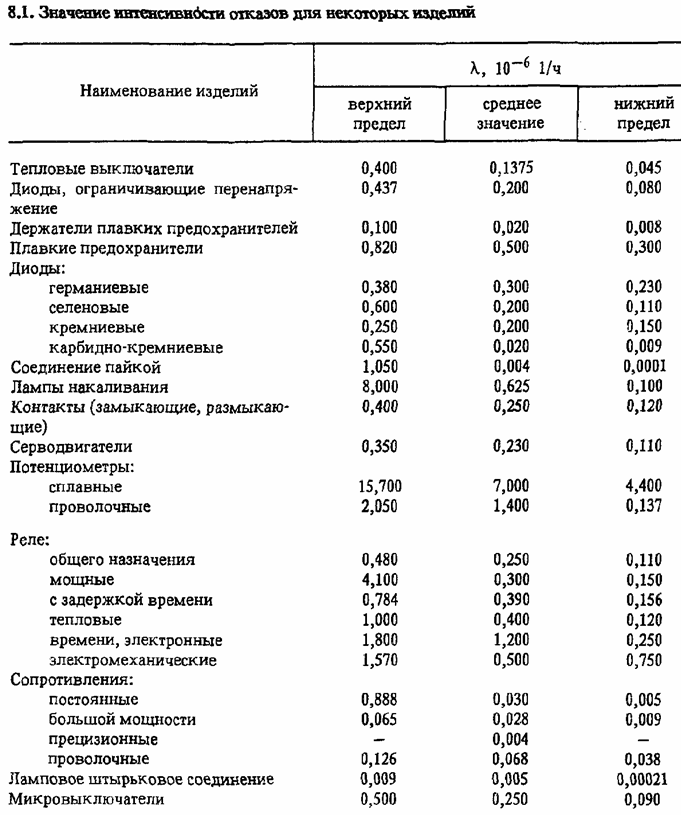
Выполнению расчётов предшествует составление таблицы. Данные выписывают по группам: резисторы, конденсаторы, диоды, реле и т.д. Значения интенсивностей отказов, поправочные коэффициенты для наиболее распространённых элементов приведены в литературе.
Интенсивность отказа элемента с учётом условий эксплуатации определяется по формуле:
 ,
,
где λ01 -номинальная интенсивность отказов.
ai - поправочный коэффициент, учитывающий влияние электрической нагрузки и температуры
Пk1 - поправочный коэффициент, учитывающий влияние механических факторов и окружающей среды.
Номинальное значение интенсивности отказов определяют при нормальных условиях эксплуатации: температуре +20…+10 0С, относительной влажности 45…80%, атмосферном давлении 98 кПа, отсутствии механических воздействий и агрессивной газовой среды, номинальном электрическом режиме.
Коэффициент нагрузки Кн оценивает электрический режим работы элемента и определяется отношением значения параметра в рабочем режиме к номинальному значению параметра. Если данных нет, то температуру принимают номинальной для данного элемента, а коэффициент нагрузки Кн =1.
Надёжность узла, блока и системы управления в целом определяется безотказной работой и средней наработки на отказ.
Вероятность безотказной работы:
 ,
,
где λ- интенсивность отказов устройства, 1/ч;
t0- время, для которого определяется интенсивность отказов, ч.

Автоматика считается надежной, если Р ≥ 0,9
Интенсивность отказов устройства:
 ,
где
,
где
λi - интенсивность отказов 1-го элемента;
ni-количество 1-х элементов (число элементов в группе );
k- число групп элементов.
Величина t – определяется цикличностью плановых ремонтов и технологическими условиями. Например, для автоматики сельхозмашин она равна числу часов работы в течение сезона, для животноводческих помещений – продолжительности стойлового периода, для СУ микроклиматом животноводческих помещений t0=4000 ч. Средняя наработка на отказ:
Тср =1/λ = 1/325,64*10-6 = 3070,88 ч
Это время должно быть больше, чем Тср>10 t0. 3070 > 2000
Расчёты надёжности удовлетворяют требуемым.
Элементы АСУ |
λср,10-6 1/ч |
Автоматы Выпрямитель двухполупериодный Датчик температуры Датчик уровня Датчик давления Дроссель Диоды Ключи управления Кнопки управления, выключатели Конденсаторы Лампы накаливания Логические элементы Предохранители Провода и кабели Пускатели Резисторы Реле постоянного тока Реле переменного тока Реле времени Рубильники Тиристоры Транзисторы Трансформаторы Электродвигатели Элементы нагревательные |
0,22 1.0 4.5 2.5 5.0 0.25 1.0…1.5 0.6 14 1.8 20 1…5 0.7 0.1 10 1.5…8 4…8 3 20 6,6 1.8 0.7…5 6 10…22 0.3 |
Задача 1 Для электрической схемы управления, изображенной на рисунке, произвести расчет и выбор мостового полупроводникового выпрямителя (VD5...VD8), промежуточного реле KV2. Контактная нагрузка реле Iк; напряжение питания реле Uн. Сигнальные лампы HL рассчитаны на напряжение Uл и ток Iл.
Дано:
Uн = 36В
Iк = 2,5А
Uл =60 В
Iл = 55 mA
Р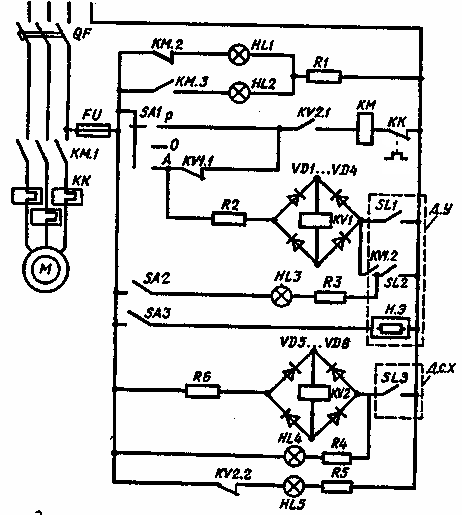 ешение.
1. Выбираем реле постоянного тока для
длительного режима работы. Реле должно
иметь 2 переключающих контакта. Контактная
нагрузка 2,5 А, напряжение питания Uн
=36 В.
ешение.
1. Выбираем реле постоянного тока для
длительного режима работы. Реле должно
иметь 2 переключающих контакта. Контактная
нагрузка 2,5 А, напряжение питания Uн
=36 В.
Решение. Пусть в нашем распоряжении имеются малогабаритные электромагнитные реле РЭС-47, РЭС-22 и РЭС-48. Из каталога определяем, что эти реле имеют сопротивление обмоток от 39 до 8000 Ом, коммутируемые токи до 3 А и имеют 2 и 3 переключающих контакта. Массы этих реле равны соответственно 36,8 и 15,5 г. При прочих равных показателях реле РЭС-22 самое малогабаритное. Таким образом, выбираем реле РЭС-22. В каталоге приводятся технические данные пяти реле. Выбираем реле с большим сопротивлением обмотки. Такое реле будет потреблять меньше электроэнергии, т.е. будет экономичным. Поэтому выбираем реле с паспортом РФ4.500.163, у которого сопротивление обмотки 700 Ом и ток срабатывания 21 мА. Проверяем параметры выбранного реле. Рабочий ток реле:
Ip = Uп / Ro6 ,
Iр = 36 / 700 = 0,051А = 51 мА.
Значение коэффициента запаса определяем по формуле: Кз = Iр / Icр,
Кз = 51 / 21 = 2,43
Как показала практика, коэффициент запаса не должен быть меньше 1,5. В данном случае это условие выполняется. Реле будет срабатывать надежно.
Определяем мощность, потребляемую обмоткой
Po6=Uп2 / Roб. ,
Роб =36* 36 / 700 = 1,85 Вт,
что допустимо для любого режима работы реле. Мощность, потребляемая обмоткой реле, должна быть не более 2Вт для длительного режима работы, и не более 7 Вт для импульсного режима.
Данное реле можно эксплуатировать в длительном режиме.
2. Для мостового выпрямителя произведем расчет и выбор диодов. Мощность потребителя Рd= 1,85 Вт, напряжение потребителя Ud = 36 В.
Решение.
Определяем ток потребителя
Id = Pd/Ud =1,85 /36 = 0,051 А.
Определяем напряжение действующее на диод в непроводящий период для мостовой схемы выпрямителя
Ub=l,57 Ud =1,57*36 = 56,52 В.
Выбираем диод из условий Iдоп> 0,5Id и Uo6p> Ub
Iдоп.> 0,5* 0,051 = 0,0255 A,
Uо6p>56,52 B.
Этим условиям удовлетворяет диод Д206 имеющий параметры: I ДОП, = 0,1 А, Uобр,= 100В
3. Определим добавочные сопротивления для подключения сигнальных ламп на сетевое напряжение 220В. Сигнальные лампы HL рассчитаны на напряжение Uл = 60 В и ток Iл = 55 mA.
Решение Определяем мощность потребляемую сигнальными лампами.
Pл = Uл * Iл = 60 * 0,055 = 3,5 Вт.
Определяем падение напряжения на добавочном сопротивлении:
UR = U – Uл = 220 – 60 = 160 В
Определим величину добавочного сопротивления
R = UR / IЛ = 160 / 0,055 = 2909 Ом.
Определяем допустимую мощность резистора:
PR = UR * IЛ = 160 * 0,055 = 8,8 Вт.
Выбираем резистор типа ПЭВ-10 сопротивлением 3,0 кОм, мощностью 10 Вт.
Таблица 8. Проволочные резисторы типа ПЭ, ПЭВ |
||
Тип резистора |
РНОМ, Вт |
Диапазон номиналов |
ПЭ-7.5 |
7.5 |
3 Ом... 5.1 кОм |
ПЭ-15 |
15 |
3 Ом... 5.1 кОм |
ПЭ-20 |
20 |
2,40м... 5.1 кОм |
ПЭ-25 |
25 |
4,7 Ом... 5.6 кОм |
ПЭ-50 |
50 |
1 Ом... 16 кОм |
ПЭ-75 |
75 |
1 Ом... ЗО кОм |
ПЭ-150 |
150 |
1 Ом... 51 кОм |
ПЭВ -2.5 |
2.5 |
43 Ом... 430 Ом |
ПЭВ-3 |
3 |
1 Ом... 3.3 кОм |
ПЭВ - 7,5 |
7,5 |
1.80 Ом... 10 кОм |
ПЭВ - 10 |
10 |
3.90 Ом... 15 кОм |
ПЭВ -15 |
15 |
4.70 Ом... 20 кОм |
ПЭВ -20 |
20 |
10 Ом... 24 кОм |
ПЭВ -25 |
25 |
10 Ом... ЗО кОм |
ПЭВ - 30 |
30 |
18 Ом... 51кОм |
ПЭВ -40 |
40 |
18 Ом... 51 кОм |
ПЭВ -50 |
50 |
47 Ом... 56 кОм |
ПЭВ - 75 |
75 |
47 Ом... 56 кОм |
ПЭВ .-100 |
100 |
47 Ом... 56 кОм |
ПЭВР-10 |
10 |
3 Ом... 220 Ом |
ПЭВР -15 |
15 |
5.1 Ом... 220 Ом |
ПЭВР -20 |
20 |
10 Ом... 430 Ом |
ПЭВР -25 |
25 |
10 Ом... 510 Ом |
ПЭВР -30 |
30 |
15 Ом... 1 кОм |
ПЭВР - 50 |
50 |
22 Ом... 1.5кОм |
ПЭВР -100 |
100 |
47 Ом... 2.7 кОм |
Таблица 6. Исходные данные для решения задаче 1 и 2 |
|
|||||||||
Вариант
|
Напряжение питания реле, UH, В
|
Контактная нагрузка, IК, А
|
Напряжение питания сигналь- ной лампы, UЛ
|
Номинальный ток сигнальной лампы, IЛ, mA
|
Тип электродвигателя
|
Условия эксплуатации |
|
|||
Наличие |
Температура, toC
|
|
||||||||
Радиатор |
Обдува |
|
||||||||
-1 |
-2- |
-3- |
-4- |
-5- |
-6- |
7 |
8 |
-9- |
|
|
1 |
16 |
0.5 |
60 |
55 |
АИР56В2УЗ |
+ |
+ |
5 |
|
|
2 |
12 |
0.7 |
66 |
60 |
АИР63А2УЗ |
+ |
+ |
10 |
|
|
3 |
24 |
0.4 |
72 |
65 |
АИР90L2Y3 |
+ |
- |
15 |
|
|
4 |
36 |
0.6 |
78 |
70 |
АИР100S2УЗ |
+ |
- |
20 |
|
|
5 |
48 |
0.9 |
84 |
75 |
АИР100L2Y3 |
- |
- |
25 |
|
|
6 |
60 |
0.8 |
90 |
80 |
АИР160М2УЗ |
+ |
+ |
30 |
|
|
7 |
48 |
0.5 |
96 |
85 |
АИР180S2УЗ |
+ |
- |
35 |
|
|
8 |
60 |
0.7 |
110 |
90 |
АИР180М4УЗ |
+ |
- |
40 |
|
|
9 |
36 |
0.9 |
127 |
95 |
АИР200L2УЗ |
+ |
- |
45 |
|
|
10 |
24 |
1.0 |
6 |
80 |
АИР100S4УЗ |
- |
- |
55 |
|
|
11 |
12 |
1.7 |
12 |
64 |
АИР112М4УЗ |
- |
- |
60 |
|
|
12 |
18 |
1.3 |
18 |
11 |
АИР132S4УЗ |
+ |
+ |
70 |
|
|
13 |
24 |
1.8 |
24 |
45 |
АИР1322М4УЗ |
+ |
- |
65 |
|
|
14 |
12 |
1.5 |
30 |
70 |
АИР160S4УЗ |
+ |
- |
75 |
|
|
15 |
24 |
1.9 |
36 |
95 |
АИР180S4УЗ |
+ |
+ |
5 |
|
|
16 |
36 |
1.4 |
42 |
90 |
АИР180М4УЗ |
- |
- |
10 |
|
|
17 |
48 |
1.1 |
48 |
85 |
АИР90L6УЗ |
+ |
+ |
15 |
|
|
18 |
60 |
1.3 |
54 |
80 |
АИР100L6УЗ |
+ |
+ |
20 |
|
|
19 |
48 |
1.3 |
60 |
75 |
АИР112МА6УЗ |
+ |
- |
25 |
|
|
20 |
36 |
1.9 |
66 |
70 |
АИР132S6УЗ |
- |
- |
30 |
|
|
21 |
30 |
1.4 |
72 |
65 |
АИР160S6УЗ |
+ |
+ |
35 |
|
|
22 |
24 |
1.5 |
80 |
60 |
АИР180М6УЗ |
+ |
- |
40 |
|
|
23 |
18 |
1.6 |
86 |
55 |
АИР200М6УЗ |
+ |
- |
45 |
||
24 |
12 |
1.7 |
92 |
40 |
АИР160М6УЗ |
+ |
- |
55 |
||
25 |
48 |
2.5 |
98 |
50 |
АИР200L2У3 |
+ |
+ |
60 |
||
26 |
30 |
2.3 |
71 |
45 |
АИР80А2УЗ |
+ |
+ |
70 |
||
27 |
12 |
2.7 |
62 |
30 |
АИР80В2УЗ |
+ |
+ |
65 |
||
28 |
18 |
2.0 |
98 |
35 |
АИР90L2V3 |
+ |
- |
75 |
||
29 |
24 |
2.2 |
92 |
20 |
АИР100А2УЗ |
+ |
- |
5 |
||
30 |
30 |
2.7 |
86 |
25 |
АИР100В2УЗ |
+ |
+ |
10 |
||
|
||||||||||||||||||||||
Таблица 12. Основные технические данные некоторых малогабаритных электромагнитных реле постоянного тока |
||||||||||||||||||||||
Тип и паспорт реле |
Сопротивление обмотки, Ом |
Ток срабатывания, мА |
Тип и количество контактов |
Сила коммутируемого тока |
||||||||||||||||||
-1- |
-2- |
-3- |
-4- |
-5- |
||||||||||||||||||
РЭС-6 |
||||||||||||||||||||||
РФО.452.130 |
2500 |
5 |
1 зам+1 разм.
|
до 6 А
|
||||||||||||||||||
РФО.452.131 |
1250 |
21 |
||||||||||||||||||||
РФО.452.132 |
850 |
25 |
||||||||||||||||||||
РФО.452.133 |
550 |
30 |
||||||||||||||||||||
РФО.452.134 |
300 |
42 |
||||||||||||||||||||
РФО.452.135 |
200 |
55 |
||||||||||||||||||||
РФО.452.136 |
125 |
62 |
||||||||||||||||||||
РЭС-10 |
||||||||||||||||||||||
РС4.524.301 |
4500 |
8 |
1 переклю- чающий
|
до 1 А
|
||||||||||||||||||
РС4.524.302 |
630 |
22 |
||||||||||||||||||||
РС4.524.303 |
120 |
50 |
||||||||||||||||||||
РС4.524.304 |
45 |
80 |
||||||||||||||||||||
РЭС -22 |
||||||||||||||||||||||
РФ4.500.125 |
2800 |
11 |
4 переклю- чающих |
до 2 А
|
||||||||||||||||||
РФ4.500.129 |
175 |
36 |
||||||||||||||||||||
РФ4.500.130 |
2500 |
10.5 |
||||||||||||||||||||
РФ4.500.131 |
650 |
20 |
||||||||||||||||||||
РФ4.500.163 |
700 |
21 |
||||||||||||||||||||
РФ4.500.225 |
650 |
19 |
||||||||||||||||||||
РФ4.500.231 |
700 |
21 |
||||||||||||||||||||
РЭС-47 |
||||||||||||||||||||||
РФ4.500.408 |
650 |
26 |
2 переклю- чающих |
5 |
||||||||||||||||||
РФ4.500.409 |
165 |
45.5 |
||||||||||||||||||||
РФ4.500.417 |
650 |
23 |
||||||||||||||||||||
1 |
2 |
3 |
||||||||||||||||||||
РФ4.500.419 |
165 |
45.5 |
|
до 2 А
|
||||||||||||||||||
РФ4.500.421 |
39 |
90 |
||||||||||||||||||||
РЭС-48 |
||||||||||||||||||||||
РС4.590.201 |
600 |
23 |
2 переключающих
|
ДоЗ А
|
||||||||||||||||||
РС4.590.202 |
100 |
52 |
||||||||||||||||||||
РС4.590.203 |
350 |
30 |
||||||||||||||||||||
РС4.500.204 |
42 |
79.5 |
||||||||||||||||||||
РС4.500.205 |
8000 |
7.2 |
||||||||||||||||||||
РС4.500.213 |
600 |
23 |
||||||||||||||||||||
РС4.500.214 |
100 |
52 |
||||||||||||||||||||
РС4.500.215 |
350 |
30 |
||||||||||||||||||||
РС4.590.216 |
42 |
79.5 |
||||||||||||||||||||
Таблица 11. Выпрямительные диоды малой и средней мощности |
||
Тип диода |
I ДОП, А |
Uобр,В |
Д229А |
0.4 |
200 |
Д229Б |
0.4 |
400 |
Д229В |
0.4 |
100 |
Д229И |
0.7 |
200 |
Д229К |
0.7 |
300 |
Д231А |
10 |
300 |
Д231Б |
5 |
300 |
Д242А |
10 |
100 |
Д242Б |
5 |
100 |
Д245А |
10 |
300 |
Д246А |
10 |
400 |
Д226А |
0.3 |
300 |
Д226Б |
0.3 |
400 |
Д226Д |
0.3 |
100 |
Д206 |
0.1 |
100 |
Д209 |
0.1 |
400 |
К0 - коэффициент, учитывающий условия охлаждения тиристора: без радиатора и обдува К0 = 0,15, при наличии радиатора, но без обдува К0 = 0,5, с радиатором и обдувом К0 =1,0;
Kt - коэффициент загрузки тиристора в зависимости от температуры окружающей среды (таблица 5)
Таблица 5. Значение коэффициента Кt в зависимости от температуры окружающей среды
Токр, °С |
до 20 |
до 40 |
до 60 |
до 80 |
до 100 |
Kt |
1,0 |
0,98 |
0,8 |
0,4 |
0,16 |
Задача 2 Выбрать тиристоры для управления асинхронным электродвигателем с короткозамкнутым ротором. Электродвигатель работает в продолжительном режиме. Условия эксплуатации (охлаждение, температура) тиристоров, тип электродвигателей даны в таблице 6. Номер варианта выберите по двум последним цифрам.
Дано:
Тип электродвигателя - АИР160М6У3
Наличие Радиатор – да Наличие Обдува – нет Температура, t = 35oC
Решение
Произведем выбор тиристоров для управления электродвигателем, который работает в продолжительном режиме, условия охлаждения тиристоров естественные, без принудительного обдува. Определяем расчетный ток тиристора Iр.т. = Iном/ К0 * Kt,
где Iном = 30,1 A - номинальный ток электродвигателя,
Ко=0,5 - коэффициент, учитывающий условия охлаждения тиристора,
Kt =0,98 - коэффициент загрузки тиристора в зависимости от температуры охлаждающей среды.
Iрт= 30,1 /0,5 * 0,98 = 61,4 А.
Выбираем предварительно тиристор Т-100 с IТ.СТ=100А.
Проверяем перегрузочную способность тиристора Т-100 Кп = Iпуск /Iн.ст., Кп= 30,1* 6,5 / 100 = 1,96
Такую перегрузку тиристор Т-100 выдержит в течение менее 1 с, что не допустимо. Выбираем тиристор Т-160 с IТ.СТ=160А.
Проверяем перегрузочную способность тиристора Т-160 Кп= 30,1* 6,5 / 160 = 1,2
Такую перегрузку тиристор Т-160 выдержит в течение 30 с, что допустимо.
Определяем номинальное напряжение тиристора
Uн= 2 * Uc = 2* 380 = 537,4 В.
Принимаем Uн = 600 В. Окончательно выбираем тиристор типа Т-160.
Таблица 10. Силовые тиристоры и симисторы |
||||||
Тип прибора
|
Номинальные величины |
|||||
Прямой ток, А
|
Напряжение, В
|
Ток утечки, мА
|
Напря- жение управ- ления, В |
Ток управления, А |
||
-1- |
-2- |
-3- |
-4- |
-5- |
-6- |
|
Силовые тиристоры серии Т |
||||||
Т10 |
10 |
50... 1200 |
5 |
5 |
0,2 |
|
Т25 |
25 |
50...1200 |
10 |
5,5 |
0,2 |
|
Т50 |
50 |
50...1200 |
15 |
7,0 |
0,3 |
|
Т100 |
100 |
50... 1200 |
20 |
7,0 |
0,3 |
|
Т160 |
160 |
50...1200 |
20 |
7,0 |
0,3 |
|
Т250 |
250 |
100...2200 |
50 |
5,0 |
0,3 |
|
Т320 |
320 |
100...1600 |
40 |
8,0 |
0,4 |
|
Тиристоры малой мощности |
||||||
КУ101А-Е |
0,075 |
50... 150 |
0.3 |
- |
0.015 |
|
Д238А-Е |
5,0 |
50...150 |
20 |
- |
0.35 |
|
КУ201А-Л |
2,0 |
25...300 |
5.0 |
- |
0.2 |
|
КУ201А-Н |
10 |
25...400 |
10 |
10 |
0.3 |
|
Симисторы |
||||||
ТС 10 |
10 |
50...800 |
3 |
5 |
0.1 |
|
ТС 80 |
80 |
50...800 |
60 |
7 |
0.4 |
|
ТС 125 |
125 |
50...800 |
60 |
7 |
0.4 |
|
ТС 160 |
160 |
50...800 |
60 |
7 |
0.4 |
|
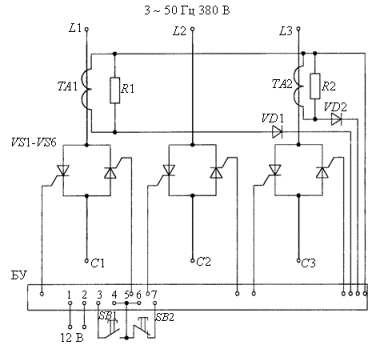
Рис. 3. Тиристорный пускатель.
Таблица 6 - Исходные данные для решения задач 1 и 2 |
|
|||||||||||||||
Вариант
|
Напряжение питания реле, UH, В
|
Контактная нагрузка, IК, А
|
Напряжение питания сигналь- ной лампы, UЛ
|
Номинальный ток сигнальной лампы, IЛ, mA
|
Тип электродвигателя
|
Условия эксплуатации |
|
|||||||||
Наличие |
Температура, toC
|
|
||||||||||||||
Радиатор |
Обдува |
|
||||||||||||||
1 |
16 |
0.5 |
60 |
55 |
АИР56В2УЗ |
+ |
+ |
5 |
|
|||||||
2 |
12 |
0.7 |
66 |
60 |
АИР63А2УЗ |
+ |
+ |
10 |
|
|||||||
3 |
24 |
0.4 |
72 |
65 |
АИР90L2У3 |
+ |
- |
15 |
|
|||||||
4 |
36 |
0.6 |
78 |
70 |
АИР100S2УЗ |
+ |
- |
20 |
|
|||||||
5 |
48 |
0.9 |
84 |
75 |
АИР100L2У3 |
- |
- |
25 |
|
|||||||
6 |
60 |
0.8 |
90 |
80 |
АИР160М2УЗ |
+ |
+ |
30 |
|
|||||||
7 |
48 |
0.5 |
96 |
85 |
АИР180S2УЗ |
+ |
- |
35 |
|
|||||||
8 |
60 |
0.7 |
110 |
90 |
АИР180М4УЗ |
+ |
- |
40 |
|
|||||||
9 |
36 |
0.9 |
127 |
95 |
АИР200L2УЗ |
+ |
- |
45 |
|
|||||||
10 |
24 |
1.0 |
6 |
80 |
АИР100S4УЗ |
- |
- |
55 |
|
|||||||
11 |
12 |
1.7 |
12 |
64 |
АИР112М4УЗ |
- |
- |
60 |
|
|||||||
12 |
18 |
1.3 |
18 |
11 |
АИР132S4УЗ |
+ |
+ |
70 |
|
|||||||
13 |
24 |
1.8 |
24 |
45 |
АИР1322М4УЗ |
+ |
- |
65 |
|
|||||||
14 |
12 |
1.5 |
30 |
70 |
АИР160S4УЗ |
+ |
- |
75 |
|
|||||||
15 |
24 |
1.9 |
36 |
95 |
АИР180S4УЗ |
+ |
+ |
5 |
|
|||||||
16 |
36 |
1.4 |
42 |
90 |
АИР180М4УЗ |
- |
- |
10 |
|
|||||||
17 |
48 |
1.1 |
48 |
85 |
АИР90L6УЗ |
+ |
+ |
15 |
|
|||||||
18 |
60 |
1.3 |
54 |
80 |
АИР100L6УЗ |
+ |
+ |
20 |
|
|||||||
19 |
48 |
1.3 |
60 |
75 |
АИР112МА6УЗ |
+ |
- |
25 |
|
|||||||
20 |
36 |
1.9 |
66 |
70 |
АИР132S6УЗ |
- |
- |
30 |
|
|||||||
21 |
30 |
1.4 |
72 |
65 |
АИР160S6УЗ |
+ |
+ |
35 |
|
|||||||
22 |
24 |
1.5 |
80 |
60 |
АИР180М6УЗ |
+ |
- |
40 |
|
|||||||
23 |
18 |
1.6 |
86 |
55 |
АИР200М6УЗ |
+ |
- |
45 |
||||||||
24 |
12 |
1.7 |
92 |
40 |
АИР160М6УЗ |
+ |
- |
55 |
||||||||
25 |
48 |
2.5 |
98 |
50 |
АИР200L2У3 |
+ |
+ |
60 |
||||||||
26 |
30 |
2.3 |
71 |
45 |
АИР80А2УЗ |
+ |
+ |
70 |
||||||||
27 |
12 |
2.7 |
62 |
30 |
АИР80В2УЗ |
+ |
+ |
65 |
||||||||
28 |
18 |
2.0 |
98 |
35 |
АИР90L2V3 |
+ |
- |
75 |
||||||||
29 |
24 |
2.2 |
92 |
20 |
АИР100А2УЗ |
+ |
- |
5 |
||||||||
30 |
30 |
2.7 |
86 |
25 |
АИР100В2УЗ |
+ |
+ |
10 |
||||||||
31 |
36 |
2,5 |
80 |
30 |
АИР160М2У3 |
- |
+ |
15 |
||||||||
32 |
42 |
2,5 |
74 |
40 |
АИР180S2У3 |
+ |
+ |
20 |
||||||||
