

Глава 2. Кинематика точки
2.1. Способы задания движения точки
Решение основной задачи кинематики зависит от способа задания движения точки. Есть три способа задания движения: векторный, координатный и естественный. Первый из них в основном представляет теоретический интерес, а два других применяют на практике.
Векторный способ задания движения. Положение движущейся точки в пространстве в каждый момент времени определяется заданием ее радиус-вектора r, эта зависимость
r = r (t) (2.1)
и представляет собой закон движения в векторной форме.
Кривая, которую описывает конец радиус-вектора r при изменении времени t от нуля до бесконечности и которая называется годографом этого вектора, будет траекторией точки.
Координатный способ задания движения. Положение точки в пространстве можно однозначно определить заданием ее координат, например, в прямоугольной декартовой системе отсчета. При этом уравнения движения точки:
x = f1 (t);
y = f2 (t); (2.2)
z = f3 (t),
будут представлять собой не только закон движения, но и уравнение траектории в параметрической форме.
Мы ограничимся рассмотрением уравнений движения в прямоугольной декартовой системе координат, хотя на практике широко применяют и другие системы отсчета. Например – полярные, сферические или цилиндрические координаты.
Естественный способ задания движения. Этот способ задания движения требует знания:
– траектории точки;
– начала и положительного направления отсчета дуговой координаты;
– закона изменения дуговой координаты s = s(t).
При этом за начало отсчета удобно выбрать начальное положение точки, а положительное направление отсчета – совпадающим с направлением скорости в начальный момент времени.
2.2. Скорость и ускорение при векторном способе задания движения
Пусть известна зависимость (2.1) и нужно найти скорость и ускорение точки.
Скорость точки. Рассмотрим движущуюся точку на отрезке траектории, и пусть в моменты времени t и t + Δt она занимает положения М и М´ (рис. 2.1).
Вектор ММ´= Δr = r(t + Δt) – r(t) называется вектором перемещения точки за время Δt.
Вектор vср = Δr/Δt называется вектором средней скорости точки за этот промежуток времени, он направлен по хорде ММ´.
Вектор скорости в момент времени t
определяется как предел этого отношения
при стремлении промежутка времени к
нулю: v(t)
=![]() Δr/Δt
= dr/dt
.
Δr/Δt
= dr/dt
.

Отметим, что М´→ М при Δt → 0 , а предельное положение секущей ММ´ определяет касательную к кривой в точке М, поэтому можно дать следующее определение скорости точки.
Вектор скорости точки v равен производной от радиус-вектора r по времени и направлен по касательной к траектории в сторону движения:
v(t) = dr/dt. (2.3)
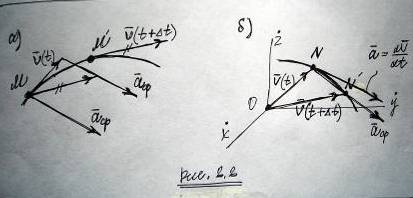
Ускорение точки. Рассмотрим точку на траектории в моменты времени t и t + Δt (рис.2.2, а). Пусть точке М соответствует скорость v(t), а точке М´ скорость v(t + Δt).
Вектор Δv = v(t + Δt) – v(t) называется вектором изменения скорости точки за время Δt.
Вектор aср = Δv/Δt называется вектором среднего ускорения точки за этот промежуток времени, он направлен по вектору Δv и лежит в плоскости, через которую проходят векторы v(t) и v(t + Δt), если последний вектор также перенести в точку М.
Вектор ускорения в момент времени t
определяется как предел этого отношения
при стремлении промежутка времени к
нулю: a(t)
=![]() Δv/Δt
= dv/dt.
Δv/Δt
= dv/dt.
Чтобы определить направление этого вектора построим годограф вектора скорости (рис. 2.2, б), на котором точкам М и М´ будут соответствовать точки N и N´, и проведем через точку М´ плоскость, в которой лежит вектор v(t). Предельное положение этой плоскости при М´ → М определяет соприкасающуюся плоскость в точке М. Теперь можно полностью определить ускорение точки.
Вектор ускорения точки a равен производной от вектора скорости v по времени, лежит в соприкасающейся плоскости и направлен в сторону вогнутости траектории.
a(t) =dv/dt = d2r/dt2. (2.4)