

5.6. Частные случаи определения положения мцс
В предыдущем параграфе мы выяснили, как найти скорости точек плоской фигуры, если известно положение мгновенного центра скоростей.
Сейчас мы рассмотрим обратную задачу: как по информации о скоростях точек плоской фигуры определить положение ее МЦС.
1. Пусть известны направления скоростей двух точек А и В плоской фигуры, которые непараллельны друг другу (рис.5.9).
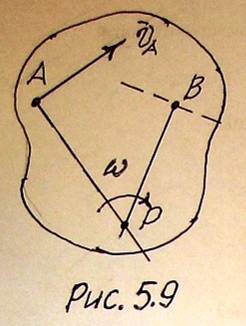
В каждый момент времени плоское движение тела можно заменить его вращательным движением относительно МЦС. А поскольку скорости точек вращающегося тела перпендикулярны отрезкам, соединяющим эти точки с центром вращения, то МЦС Р плоской фигуры будет находиться в точке пересечения перпендикуляров к скоростям vА и vВ.
2. Пусть известны векторы скоростей двух точек А и В плоской фигуры, которые параллельны друг другу: vA || vB. Рассмотрим варианты, возможные в этом случае.
а). vA ↑↑ vB , vA ^АВ , vA ≠ vB . Поскольку скорости точек вращающегося тела пропорциональны расстояниям от оси вращения, центр Р будет находиться на пересечении двух прямых: одна проходит через концы векторов vA и vB, а другая – через точки А и В (рис. 5. 10, а).
б). vA ↑↓ vB , vA ^ АВ , vA ≠ vB . Этот случай принципиально не отличается от предыдущего (рис. 5. 10, б).
в). vA ↑↑ vB , vA ^ АВ , vA = vB . За исходный возьмем случай а), зафиксируем vA, а величину vB устремим к vA. Тогда точка пересечения прямых, в которой находится МЦС Р устремится в бесконечность, то есть в этом случае АР = ∞, а ω = vA /АР = 0. Это означает, что в данный момент времени плоская фигура движется поступательно (рис. 5.10, в).

г). vA || vB , но vA не перпендикулярна АВ. По теореме о проекциях скоростей точек плоской фигуры vA = vB. Как и в случае в) это означает, что в данный момент времени тело движется поступательно, то есть АР = ∞, а ω = vA /АР = 0 (рис. 5.10, г).
При таком мгновенно поступательном движении скорости всех точек тела равны, но ускорения различны – в отличие от чисто поступательного движения тела .
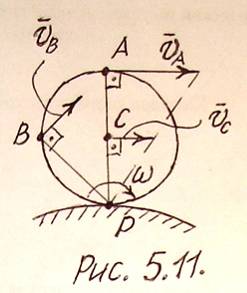
3. Пусть колесо движется без проскальзывания по неподвижной поверхности. Точка контакта неподвижна, поэтому по определению является мгновенным центром скоростей колеса (рис.5.11).
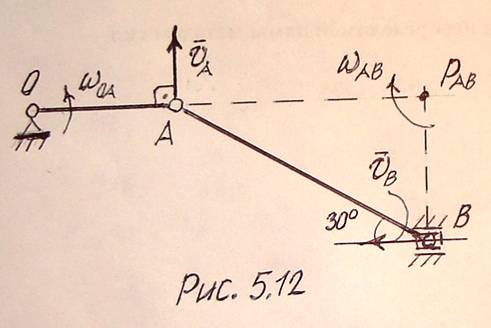
Пример 5.2. Определить скорость
ползуна В в указанном положении
кривошипно-шатунного механизма, если
кривошип ОА длиной 1 м вращается со
скоростью
![]() с–1 (рис.5.12).
с–1 (рис.5.12).
5.7. Теорема об ускорениях точек плоской фигуры
Теорема. Ускорение любой точки В плоской фигуры равно геометрической сумме ускорения полюса А и ускорения точки В в ее вращении вокруг полюса А.
Доказательство. По теореме о скоростях точек плоской фигуры (§5.2)
vB = vA + vAB ω AB. (5.1´)
Дифференцируя по времени, получим:
dvB /dt = dvA /dt + (dω/dt)AB + ω(dAB/dt),
или
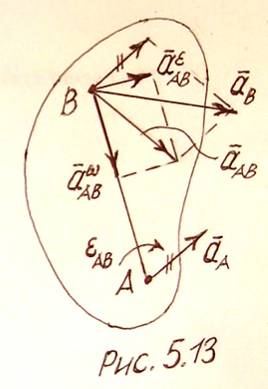
aB = aA + aεAВ + aωAВ = aA + aAВ, (5.3)
где aεAВ = ε AB и aωAВ = ω vAB соответственно вращательное и центростремительное ускорение точки В в ее вращении относительно полюса А (рис.5.13).
Модули этих ускорений равны:
| aεAВ | = aεAВ = ε · AB, (5.4)
| aωAВ | = aωAВ = ω2 · AB. (5.5)
Теорема доказана.
Примечания
Отметим сходство в подходе к решению задач по кинематике на тему плоское движение и задач по статике на тему плоская система сходящихся сил.
В статике мы исходили из условия равновесия:
ΣFi = 0, (а)
которое интерпретировали графически – как замкнутость силового многоугольника, или аналитически – как уравнения равновесия:
ΣXi = 0, ΣYi = 0. (б)
При графическом решении в качестве неизвестных выступали модуль и направление неизвестной реакции или модули двух известных по направлению реакций. При аналитическом решении – это были проекции двух неизвестных реакций на оси координат.
В кинематике вместо (а) выступают другие векторные равенства – (5.1) или (5.3):
vB = vA + vAB (5.1´)
и
aB = aA + aεAВ + aωAВ (5.3´)
соответственно. Эти векторные уравнения, как и (а) содержат не более двух неизвестных, в качестве которых выступают модули и направления неизвестных скоростей и ускорений точек тела или его угловые скорости и ускорения.
Решение, как и в статике можно найти графически или аналитически из уравнений, аналогичных (б), которые получаются проектированием (5.1´) и (5.3´) на оси координат.
При графическом решении мы сразу определяем истинное направление реакции связи – в (а), или скорости и ускорения – в (5.1´) и (5.3´).
При этом векторные многоугольники для (5.1´) и (5.3´) в отличие от силовых многоугольников в статике являются незамкнутыми, поскольку соответствуют рассмотрению не уравновешенной системы сил, а нахождению равнодействующей системы сходящихся сил, равной сумме векторов.
При аналитическом решении результат может получиться отрицательным – это означает, что мы не угадали истинное направление реакции связи или кинематического параметра движения.
Если найденное неизвестное будет использоваться в дальнейшем решении, рекомендуется изменить его направление на противоположное и решить задачу заново, чтобы результат получился положительным.
Правильность аналитического решения можно проверить с помощью графического решения задачи.
Пример 5.3. В задаче из примера 5.1 определить ускорение ползуна В в указанном положении кривошипно-шатунного механизма, если кривошип ОА длиной 1 м равномерно вращается со скоростью 1 с–1.
Решение.
1). Введем систему координат с началом в точке В, направив ось Вх по ВА (рис. 5.14) и определим угловую скорость шатуна АВ, используя найденные ранее скорости точек А и В : vA = 1 м/с, vВ = м/с.
Для этого спроектируем (5.1):
vB = vA + vAB (5.1´)
на оси х, y, считая все входящие в (5.1) векторы направленными в положительные стороны этих осей:
vB cos 30˚ = vA; (а)
vB sin 30˚ = vAB. (б)
Уравнение (а) повторяет содержание теоремы о проекциях скоростей двух точек плоской фигуры (5.2), а из (б) с учетом того, что vAB = ωAB·AB, мы найдем угловую скорость звена AB:
ωAB
= (1/AB)
vB
sin 30˚ =
![]() с–1.
с–1.
Проверим правильность найденного аналитического решения графически. Для этого от произвольно выбранного центра О1 откладываем вектор vA и проводим через начало и конец этого вектора прямые, параллельные vB и vAB , до их пересечения. Найденные гипотенуза и катет векторного треугольника и будут равны vB и vAB соответственно. Графическое решение, как видим, свелось к построению треугольника по известной стороне и направлению двух других сторон. Величины vB и vAB будут положительными, поскольку векторы в многоугольнике и на чертеже совпадают по направлению. При этом
vAB
= vA
tg30˚=
![]() ,
ωAB
= vAB
/AB = 1/3 с–1.
,
ωAB
= vAB
/AB = 1/3 с–1.
2). Для определения ускорения точки В нужно предварительно определить ускорение точки А, принадлежащей одновременно кривошипу ОА.
Поскольку ωОА = соnst, то полное ускорение точки А совпадает с центростремительным:
aА
= aАω![]() ω2ОАОА
=
12·1 = 1м/с2.
ω2ОАОА
=
12·1 = 1м/с2.
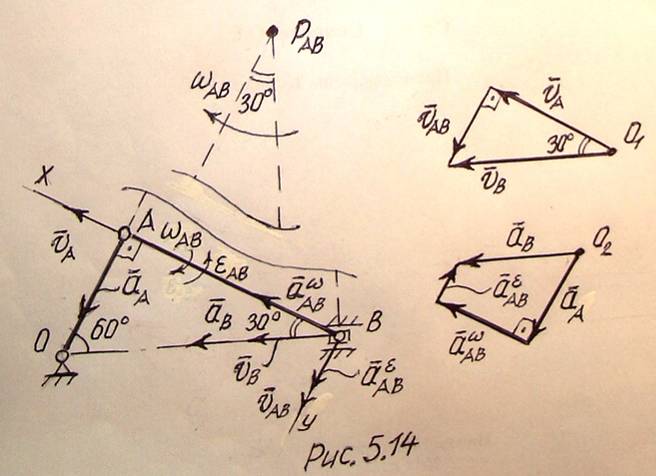
3). Для аналитического определения ускорения точки В спроектируем векторное уравнение (5.3)
aB = aA + aεAВ + aωAВ (5.3´)
на ось Bх. Учитывая, что aA и aεAВ перпендикулярны этой оси, получим:
aB
cos30 = aωAВ
![]() ω2 ·
AB =
(1/3)2
·
=
/9,
ω2 ·
AB =
(1/3)2
·
=
/9,
откуда
aB = aωAВ /cos30 = ( /9)/( /2) = 2/9 м/с2.
Чтобы графически найти ускорения точки В построим соответствующий (5.3) векторный многоугольник. Для этого от произвольно выбранного центра О2 последовательно откладываем векторы aA и aωAВ, а затем через начало первого и конец последнего вектора проводим прямые, параллельные aB и aεAВ до их пересечения.
Разбивая многоугольник на прямоугольник и треугольник, нетрудно определить модули векторов aB и aεAВ:
| aВ | = 2/9 м/с2; | aεAВ | = | aА | – (1/2)| aВ | = 1 – 1/9 = 8/9 м/с2.
При этом проекция вектора aεAВ на ось Ву : aεAВ будет отрицательной, поскольку направления этих векторов на векторном многоугольнике и на чертеже противоположны.
И действительно, проектируя (5.3´) на ось Ву получим:
aB cos60˚ = aA + aεAВ ,
откуда
aεAВ = aB cos60˚ – aA = (1/2)(2/9) – 1 = – 8/9 м/с2.
Это означает, что в данный момент времени aεAВ ↑↓ vAB и εAВ ↑↓ ωAВ, то есть шатун АВ вращается замедленно.
Ответ: | aВ | = 2/9 м/с2 , aВ ↑↑ vВ.
Примечания
Угловую скорость шатуна АВ в примере 5.3 можно было определить и с помощью МЦС этого звена, расположенного в точке PAВ , где пересекаются перпендикуляры к векторам vA и vB: ωAB = vA / АPAВ = 1/3 с–1.
При этом звено АВ относительно центра PAВ, а также точка В относительно точки А и точка А относительно точки В будут вращаться по ходу часовой стрелки.