

Глава 5. Плоское движение тела
5.1. Разложении плоского движения на поступательное и вращательное
Этот вид движения ТТ заметно сложней по сравнению с поступательным и вращательным, и требует больше внимания для понимания его сути – уже потому, что не изучается в школьной программе.
Определение. Плоским, или плоскопараллельным называется такое движение твердого тела, при котором все его точки движутся в плоскостях, параллельных основной неподвижной плоскости.
Рассмотрим тело в виде цилиндра или призмы, скользящее своим основанием по гладкой поверхности (рис.5.1).
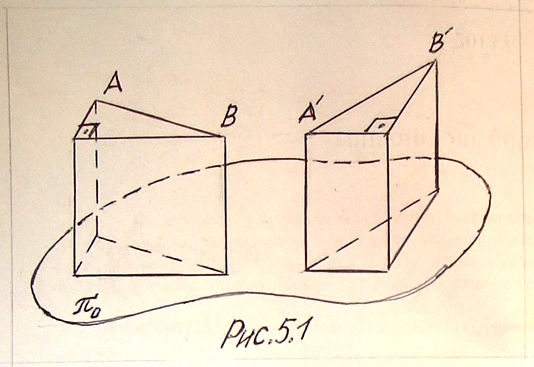
Очевидно, что это движение однозначно описывается движением любого плоского сечения π1, параллельного неподвижной плоскости π0, а фактически – движением любого отрезка АВ, соединяющего две фиксированные точки сечения. Поэтому в дальнейшем плоское движение тела мы будем рассматривать как движение плоской фигуры.
Вполне естественным будет вопрос, как
связаны поступательное, вращательное
и плоское движения? Другими словами,
как поставить в соответствие множествам
А, В и С, где
![]() (рис.5. 2), эти три вида движения?
(рис.5. 2), эти три вида движения?
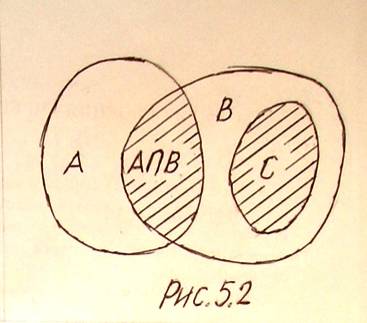
Следующая теорема дает ответ на этот вопрос.
Теорема. Плоское движение фигуры можно представить суммой двух движений: ее поступательного движения вместе с произвольно выбранной точкой – полюсом и вращательного движения фигуры вокруг этого полюса.
Доказательство. Пусть отрезок прямой, соединяющий фиксированные точки А и В такого тела, в результате его перемещения занял положение А1В1 (рис.5. 3).
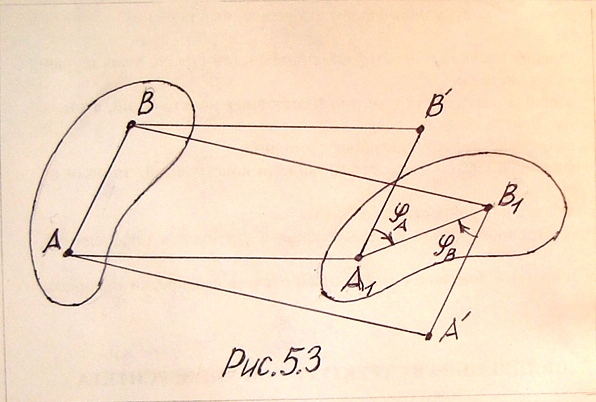
Докажем теорему, выбрав вначале в качестве полюса точку А.
Переместим тело поступательно так, чтобы отрезок АВ занял положение А1В' || АВ, а потом повернем тело вокруг полюса А1 на угол φА .
Выберем затем в качестве полюса точку В и переместим тело так, чтобы отрезок АВ занял положение А'В1 || АВ, а потом повернем тело вокруг полюса В1 на угол φВ = φА.
Теорема доказана.
Примечания
Нетрудно заметить, что результат не изменится при смене последовательности движений: вначале вращательное движение, а затем – поступательное.
Величина углового перемещения в результате поворота тела от выбора полюса не зависит.
Величина поступательного перемещения зависит от выбора полюса (АА1 АА'), и как будет показано в §3.5 полюс можно выбрать так, что величина поступательного перемещения станет равной нулю.
Уравнения плоского движения фигуры в плоскости xOy имеют вид:
xA = f1(t); yA = f2(t); φ = f3(t),
где А – полюс.
5.2. Теорема о скоростях точек плоской фигуры
Теорема. Скорость любой точки В плоской фигуры равна геометрической сумме скорости полюса А и скорости этой точки В в ее вращении относительно полюса А.
Рассмотрим плоскую фигуру с точкой А, выбранной в качестве полюса и найдем скорость любой другой ее точки В (рис.5. 4).
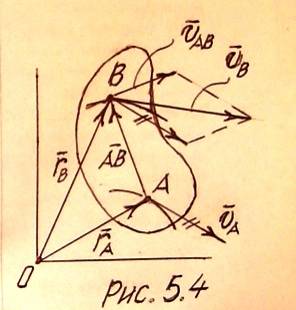
Проведем радиус-векторы точек А и В. При движении фигуры в любой момент времени будет выполняться соотношение:
rB = rA + AB,
где |AB| = const. Дифференцируя по времени, получим
drB/dt = drA/dt + d(AB)/dt
или
vB = vA + vAB, (5.1)
где vAB – скорость точки В в ее вращении вокруг полюса А. Напомним, что
vAB
![]() ω AB,
ω AB,
где ω – вектор угловой скорости плоской фигуры, и |vAB| = vAB = ω·AB.
Поскольку ω = dφ/dt, то угловая скорость плоской фигуры от выбора полюса не зависит