

Содержание отчета
Отчет выполняется согласно ГОСТ каждым студентом индивидуально и после проверки студент допускается к защите лабораторной работы. В отчете должна содержаться следующая информация:
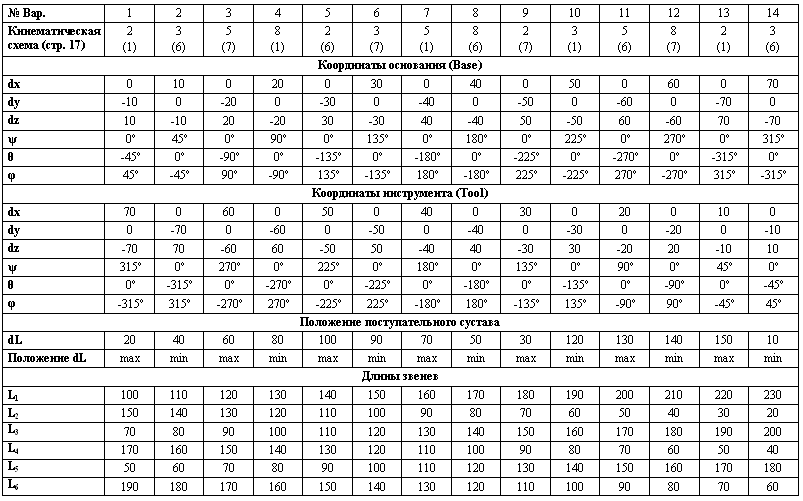
1. Кинематическая схема ПР с расположением фреймов суставов.
2. Таблица параметров Д-Х звеньев и охвата.
3. Расчет прямой задачи кинематики в контрольной точке.
4. Распечатка кинематической модели ПР с окном данных, в котором отображены обобщенные и декартовы координаты контрольной точки.
Варианты кинематических структур
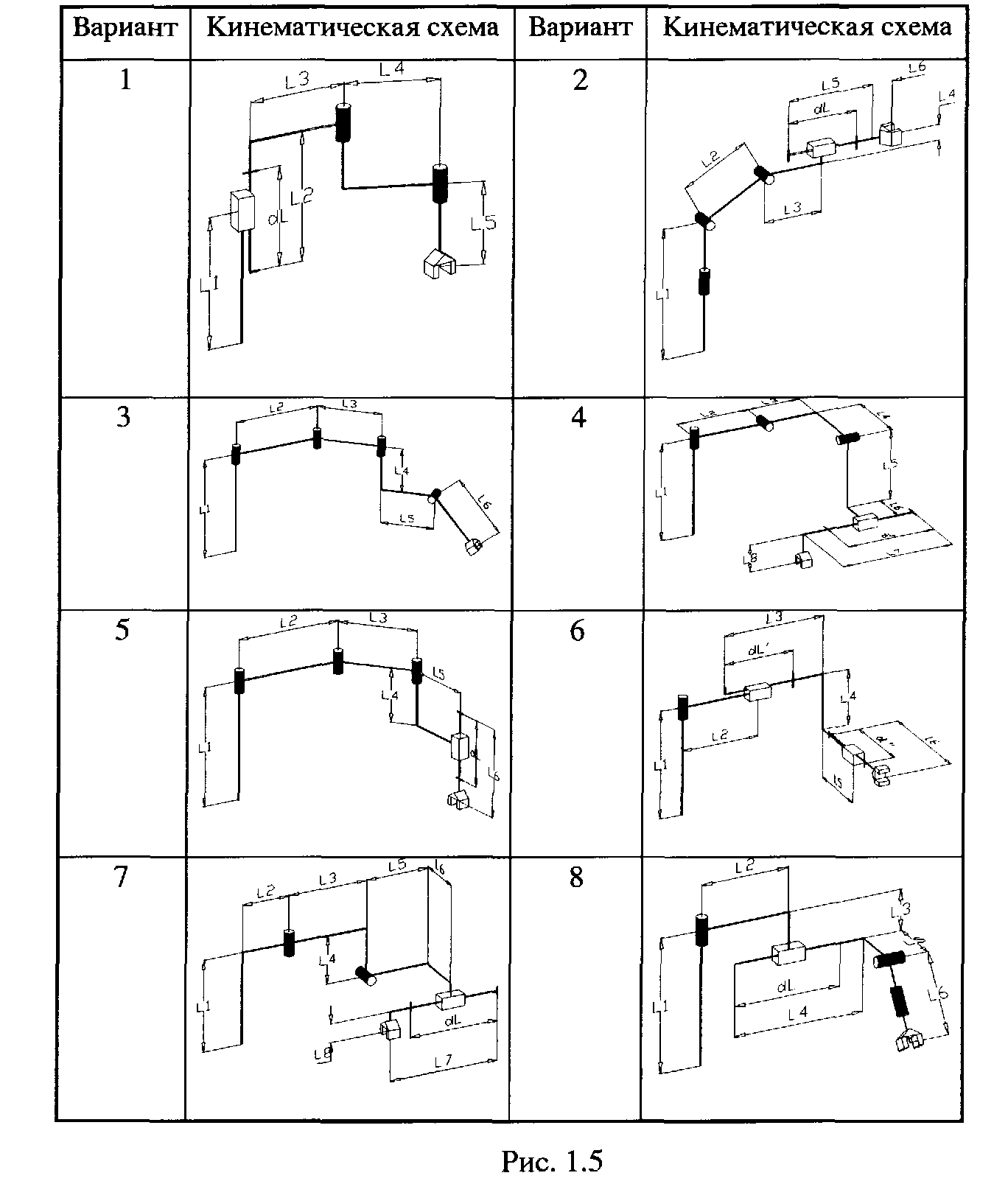
Варианты выполнения лабораторных работ
Лaбopaтopнaя paбoтa 2 (Теоретическая часть) Изучение языка программирования arps на базе системы графического моделирования rsim
Цeль paбomы – изучение системы программирования движения ARPS и методов обучения промышленных роботов.
1 Общие сведения о системе arps
Комментарии в тексте программы начинаются с буквы С в первой позиции строки.
Расстояния. Расстояния задаются в миллиметрах. Наименьшее приращение расстояния составляет 0,01 мм.
Угловые величины. Угловые величины задаются в градусах. Наименьшее угловое изменение составляет 0,005 градусов.
Программные инструкции. Список основных программных инструкций приведен ниже.
Задание скорости. Скорость движения рабочего органа манипулятора определяется либо как величина абсолютной скорости, либо она может быть установлена в пределах от 2,0 до 3000 мм/с с помощью коэффициента масштабирования скорости (см. операторы SPEED, SPEED%, SPEED NEXT). На практике верхним пределом скорости является 500 мм/с, который не должен быть превышен за исключением чрезвычайных случаев. Наименьшее допустимое изменение скорости составляет +0.1 мм/с. Задание абсолютной величины скорости имеет смысл только в случае прямолинейных перемещений. Она измеряется для начала координатной системы инструмента tool, расположенного на фланце, относительно координатной системы world.
Коэффициент масштабирования скорости задается в процентах от 1 до 300 (100% соответствуют коэффициенту 1). Наименьшее значение коэффициента составляет 1%. Действительная скорость манипулятора вычисляется путем умножения абсолютной скорости на коэффициент масштабирования.
Точки определяются положениями, к которым или через которые рабочий орган манипулятора должен пройти в процессе выполнения производственной задачи. Точки бывают трех типов:
1) обыкновенные точки - заданы координаты X,Y,Z,0,A,T;
2) составные точки - одна обыкновенная точка задается относительно другой;
3) прецизионные точки - заданы координаты ql,q2,..,q6.
Точкам могут присваиваться имена, состоящие из одного или нескольких символов. Допустимыми символами являются буквы A-Z, цифры 0-9 и знак точки. Отличительным признаком прецизионной точки является знак # в начале имени.
Системы координат. Для управления манипулятором используют систему координат суставов Joint, а также декартовы - базовую систему координат world и систему координат инструмента tool. Базовая система координат фиксирована, и только с использованием программной инструкции BASE ее позицию можно изменить. Инструментальная система координат tool связана со схватом манипулятора. Положение системы координат tool может быть скорректировано при помощи инструкции TOOL.
Программные переключатели. На работу системы управления можно влиять с помощью программных переключателей, которые представляют собой переменные, принимающие два значения - активное разрешенное и пассивное запрещенное состояния. Состояние программного переключателя может изменяться командами ENABLE и DISABLE. Например, инструкция ENABLE BREAK устанавливает программный переключатель BREAK в активное состояние.
Переключатель BREAK влияет на непрерывность движения. Если переключатель находится в разрешенном состоянии (ENABLE BREAK), рабочий орган манипулятора будет останавливаться в точке назначения каждой инструкции перемещения. Если переключатель находится в запрещенном состоянии (DISABLE BREAK), то рабочий орган манипулятора переходит от одной точки к другой на постоянной скорости, пока программа не достигнет инструкции, безусловно останавливающей движение (например, инструкция DELAY). Исходное состояние этого переключателя - DISABLE.
Пример:
.PROGRAM SQUARE
SPEED 400
ENABLE BREAK
GO A
SPEED NEXT 100
GOSB
DISABLE BREAK
GOSC
SPEED% 50
GOSD
COS A
.END
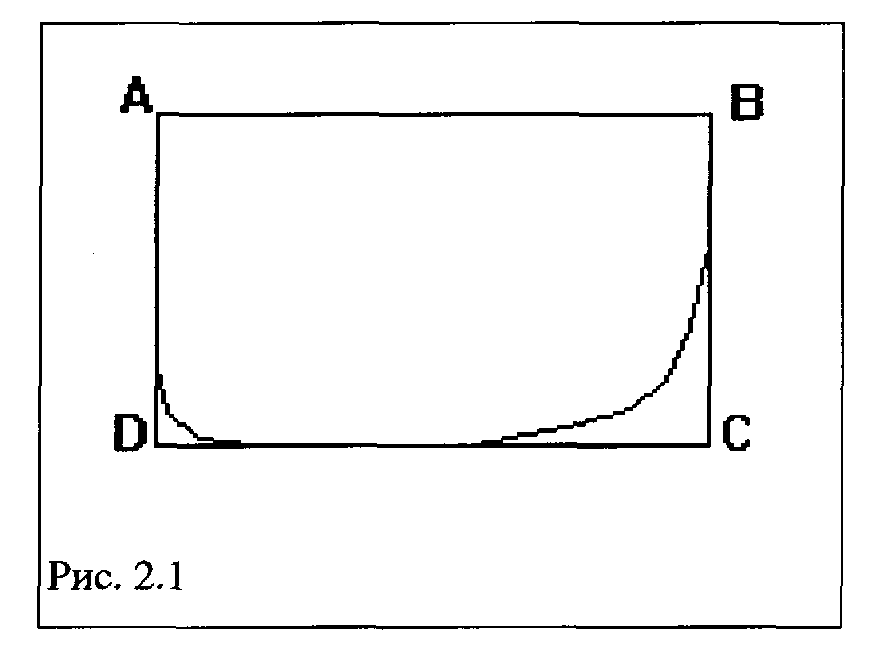
На рис. 2.1 изображен вид траектории инструмента робота при отработке приведенной программы. Кривизна реальной траектории в очках D и С зависит от установленной скорости прохождения через эти точки.