

4.4.4. Шагающее ходовое оборудование
Шагающее ходовое оборудование состоит из опорной рамы (базы) и механизма шагания. Последний имеет лыжи (башмаки), механизм перемещения и привод.
Схемы механизмов шагания различаются по конструкции механизма шагания и могут быть гидравлическими и кривошипными (рис. 12.8). Они состоят из двух одинаковых, синхронно работающих механизмов шагания, расположенных симметрично, относительно продольной оси экскаватора.
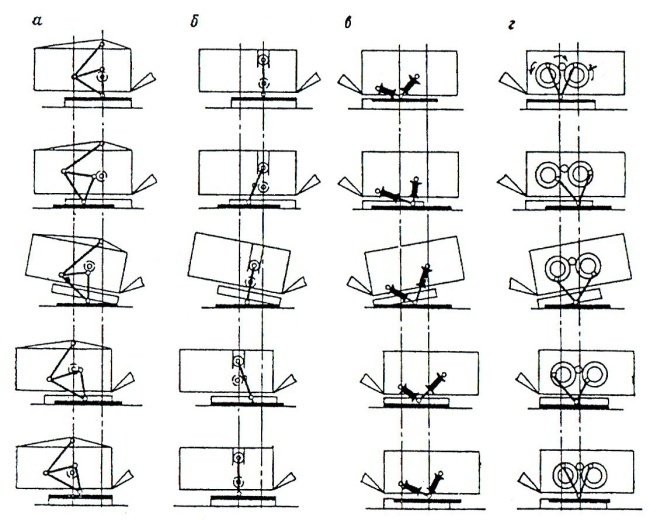
Рис. 4.12. Трехопорные схемы механизмов шагания:
а – кривошипно-шарнирного с треугольной рамой; б – кривошипно-ползункового; в гидравлического; г – двухкривошипного
При любом виде шагающего ходового оборудования полный цикл передвижения экскаватора складывается из следующих элементов: подачи лыж на грунт, подъема экскаватора, передвижения экскаватора, опускания экскаватора, подъема лыж в исходное положение.
Независимо от вида шагающего ходового оборудования (кроме специального – ЭШ 100.100 и ЭШ 65.100), в момент непосредственного передвижения, экскаватор опирается на две лыжи и на часть опорной базы. Поэтому он называется трехопорным. Поскольку у таких экскаваторов центр тяжести находится впереди оси механизма шагания, передвижение машины может быть осуществлено только в направлении противовеса.
На драглайнах НКМЗ (Украина) и на всех моделях драглайнов зарубежных фирм применяются кривошипные системы различных видов: кривошипно-шарнирная с треугольной рамой («Marion», см. рис. 4.12, а), кривошипно-ползунковая («Page», см. рис. 4.12, б), двухкривошипная («Marion», см. рис. 4.12, г), кривошипно-эксцентриковая (НКМЗ) и эксцентриковая с тягой («Marion»).
Все модели драглайнов УЗТМ (за исключением ЭШ 11.75) и модель 4250-W «Busyrus» (США) оборудованы гидравлическими механизмами шагания.
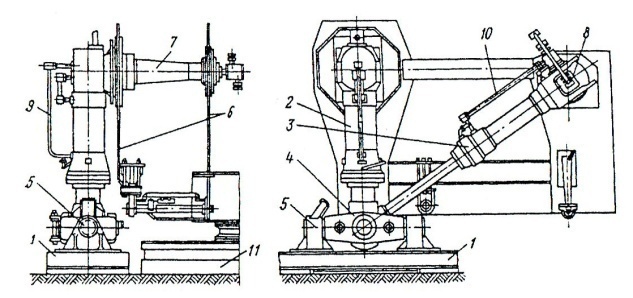
Механизм шагания с электромеханическим приводом (рис. 4.13) впервые применен на шагающем экскаваторе ЭШ 11.75 в 1996 г.
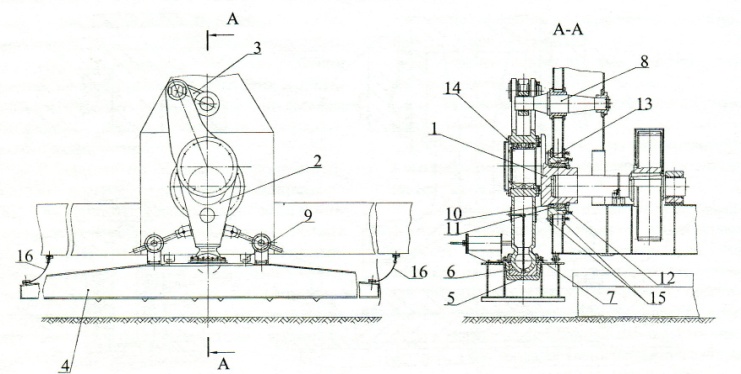
Рис. 4.13. Механизм шагания с электромеханическим приводом шагающего экскаватора ЭШ 11.75:
1 – эксцентрик с валом; 2 – нога 3 – рычаг; 4 – башмак; 5 – подпятник; 6 – вкладыш сферический; 7 – крышка; 8 – ось; 9 – опорные ролики; 10 – втулка бронзовая; 11 – втулка сферическая; 12 – крышка сферическая; 13 – корпус сферический; 14 – подшипник конический двухрядный; 15 – кольца опорные; 16 – канаты
В отличие от гидравлического, он более простой в обслуживании и эксплуатации, надежен и имеет более высокую скорость передвижения. Механизм шагания имеет электродвигатель постоянного тока, трехступенчатый редуктор, бортовые зубчатые передачи открытого типа, правые и левые эксцентриковые валы, ноги, установленные на конических подшипниках качения и башмаки с шаровыми опорами для ног.
Гидравлический механизм шагания экскаваторов ЭШ 15.90 (рис. 4.14), ЭШ 25.100 и других состоит из лыж 1, подъемного 2 и тягового 3 гидроцилиндров.
а) б)
Рис. 4.14. Гидравлический механизм шагания экскаватора ЭШ 15.90:
а – схема механизма; б – общий вид
4.4.5. Шагающе-рельсовое ходовое оборудование
Шагающе-рельсовое ходовое оборудование было впервые разработано на НКМЗ и применено на отвалообразователях и мощных роторных экскаваторах.
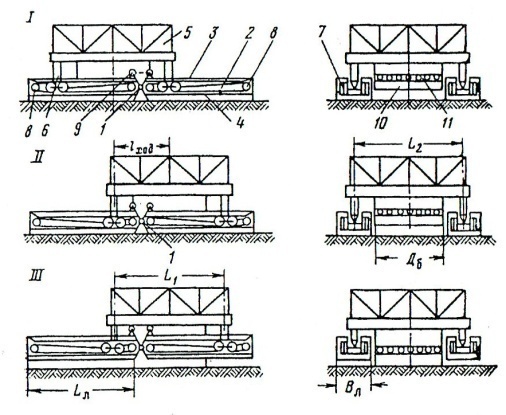
Ходовое оборудование включает в себя четыре соединенные сферическим шарниром 1 лыжи 2 (лыжа может быть неразрезная), на которых имеются верхние 3 и нижние 4 рельсы. Верхняя часть экскаватора 5 через четыре гидродомкрата 6 опирается на ходовые тележки 7.
В рабочем положении машина опирается через гидродомкраты и ходовые тележки на нижние направляющие лыж. База вместе с верхней частью приподнята над землей (положение I). Для передвижения верхней части машины включают тяговые лебедки 8, которые с помощью полиспастов перемещают машину по лыжам в нужном направлении. Когда тележки достигнут крайнего положения на лыжах (положение II), производится опускание машины на базу и последующий подъем лыж через верхние направляющие рельсы до упора катков 9 в раму машины (положение III). Далее происходит отключение гидравлической системы домкратов и включение тяговых лебедок, которые перемещают лыжи вперед на величину шага, после чего тяговые лебедки отключаются с помощью гидросистемы, происходит опускание лыж на грунт, подъем машины и базы на величину, обеспечивающую необходимый зазор между базой и грунтом. Далее цикл шагания может быть повторен.
|
Рис. 4.15. Схема работы шагающе-рельсового ходового оборудования |
Применительно к роторным экскаваторам лыжи шагающе-рельсового ходового устройства с двумя поворотными рамами располагаются вдоль оси движения машины к забою (рис. 4.15).

Рис. 4.16. Шагающе-рельсовое оборудование с двумя поворотными рамами
Передвижение машины осуществляется на лыжах 1 при поднятой базе 2. Гидродомкраты 3 для подъема машины и лыж установлены в нижней раме 4, которая при стоянке машины на базе опирается на последнюю с помощью поворотного круга 5, используемого для изменения направлений движения. Поскольку процесс экскавации у роторных машин осуществляется поворотом верхней части 6 экскаватора, последняя устанавливается на нижнюю раму через второй поворотный круг 7. Образование каждой новой стружки осуществляется передвижением машины на ходовых тележках 8 по лыжам: переход с подуступа на подуступ и от блока к блоку осуществляется перестановкой лыж и перемещением всей машины. Поворот верхней части 6 относительно нижней рамы 4 и базы 2 обеспечивается поворотными механизмами через венцовые шестерни 9 и 10. Мощность привода шагающе-рельсового хода рассчитывается так же, как и для железнодорожного хода.