

17. Одноконтурные аср. Блок-схема аср. Обратные связи в аср. Формирование отрицательной обратной связи в аср.
Одноконтурные автоматические системы регулирования.
Рассмотрим АСР, предназначенные для регулирования (поддержания на постоянном заданном значении) одной технологической величины, реагирующие на ее отклонение от заданного значения и имеющие один замкнутый контур. Это наиболее распространенные одномерные одноконтурные замкнутые АСР.
Блок-схема АСР приведена та рис. IV-1. АСР представляет собой замкнутую цепь, состоящую из объекта регулирования ОР, измерительного преобразователя ИП, автоматического регулятора АР и исполнительного устройства ИУ. Возмущающее воздействие z приводит к отклонению регулируемой технологической величины объекта у от заданного значения и. Информация об изменении регулируемой величины воспринимается измерительным преобразователем системы ИП и передается на автоматический регулятор АР. Последний сравнивает текущее значение регулируемой величины у с заданным и и в зависимости от знака и величины рассогласования по заранее заложенному в регулятор закону (алгоритму) вырабатывает регулирующее воздействие х, которое через исполнительное устройство ИУ направляется на объект регулирования ОР и приводит к ликвидации или уменьшению этого рассогласования. Таким образом, причина, вызвавшая срабатывание регулятора, в свою очередь, находится под его обратным воздействием.

Примером АСР может служить система регулирования температуры продукта укрепляющей части ректификационной колонны (рис. IV-2). Измерительный преобразователь системы ИП (термоэлектрический термометр в комплекте со вторичным прибором) измеряет температуру продукта, покидающего укрепляющую часть колонны, и передает сигнал на автоматический регулятор АР. При появлении возмущения z АР реагирует на отклонение текущего значения температуры у от заданного и и вырабатывает регулирующее воздействие х на исполнительное устройство ИУ, которое изменяет в нужном направлении подачу флегмы в колонну, вследствие чего температура продукта в ректификационной колонне возвращается к заданному значению. При увеличении температуры продукта на выходе из верхней части ректификационной колонны автоматический регулятор увеличивает подачу флегмы в колонну, и наоборот.
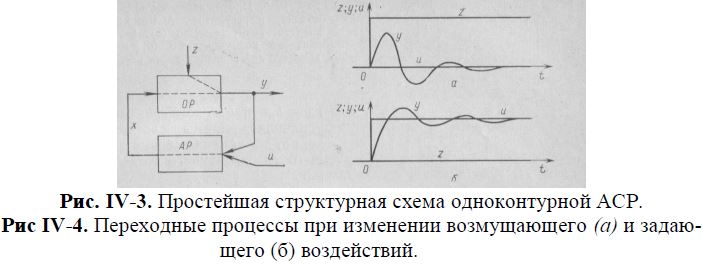
При исследовании одномерных одноконтурных замкнутых АСР их структурную схему приводят к простейшему виду: объект ОР и регулятор АР (рис. IV-3). При этом все звенья, определяющие динамические свойства чувствительных элементов, измерительных устройств, исполнительных устройств и линии связи, относят обычно к объекту. Такие системы имеют как минимум две входные величины (возмущающее z и задающее и воздействия), действие которых приводит к изменению одной выходной величины — текущего значения регулируемой величины у. Переходные процессы, возникающие при изменении возмущающего z и задающего и воздействий, приведены на рис. IV-4. После нанесения возмущения (рис. IV-4, а) выходная величина у изменяется и возвращается к первоначальному значению (рис. IV-4, а); при изменении задания (рис. IV-4, б) после окончания переходного процесса выходная величина у устанавливается на значении, соответствующем новому заданию. Сигналы в этих системах могут проходить по двум каналам z→y и и→у. которые имеют свои статические и динамические свойства.
Обратные связи АСР. Системы, работающие по принципу отклонения, при действии возмущений z имеют прямую связь — цепочку звеньев объекта, по которой сигнал проходит от входа системы к ее выходу, и обратную связь (ОС), по которой сигнал проходит через автоматический регулятор и канал объекта х→у от выхода системы к ее входу. ОС системы, включающая автоматический регулятор, называется главной ОС; для стабилизации работы системы она обязательно должна быть отрицательной. Это означает, что она должна действовать на объект в направлении, противоположном действию возмущения, т. е. если выходная величина объекта под действием возмущения отклонилась от заданного значения, то автоматический регулятор должен выработать такое воздействие, которое будет направлено на устранение или прекращение отклонения выходной величины. Обеспечить такое условие можно лишь при наличии в замкнутом контуре нечетного числа элементов обратного действия, т. е. таких элементов, возрастание входной величины которых приводит к уменьшению выходной. Число же элементов прямого действия (элементов, у которых увеличение входной величины приводит к возрастанию выходной) в замкнутом контуре может быть любым. На схемах входы элементов прямого действия обозначаются знаком «плюс», а входы элементов обратного действия — знаком «минус».
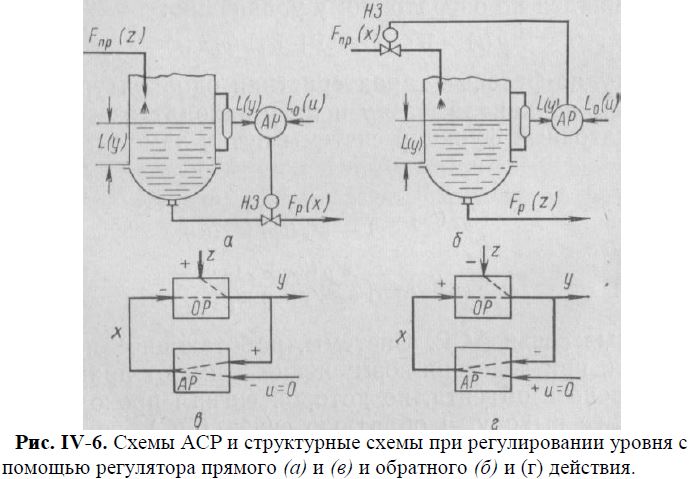
Рассмотрим формирование отрицательной обратной связи в двух АСР, которые вместе со своими структурными схемами приведены на рис. IV-6. Обе системы предназначены для поддержания постоянства уровня жидкости L в аппарате.
Объект регулирования
(рис. IV-6, в и IV-6, г) имеет одну
выходную (регулируемую) величину у и
две входных величины, одна из которых
(z) является возмущающим воздействием,
а другая (х) используется в качестве
регулирующей величины, т. е. в объекте
имеется два канала прохождения сигналов
z→y и х→у. На вход регулятора
направляют рассогласование между
текущим у и заданным значениями
регулируемой величины. При этом на
выходе регулятора формируется регулирующее
воздействие х. Обычно входные
величины регулятора алгебраически
суммируются
 (сравниваются) и это рассогласование
проходит по единственному каналу
регулятора (у—и)→х. На рис. IV-6,a
регулятор воздействует на расход
жидкости из аппарата (Fp), а на рис.
IV-6,б — на приток жидкости в аппарат
(Fnp).
(сравниваются) и это рассогласование
проходит по единственному каналу
регулятора (у—и)→х. На рис. IV-6,a
регулятор воздействует на расход
жидкости из аппарата (Fp), а на рис.
IV-6,б — на приток жидкости в аппарат
(Fnp).
В первом случае увеличение Fp приводит к понижению L, т. е. объект представляет собой элемент обратного действия. Чтобы сформировать в этой системе отрицательную обратную связь, необходимо использовать регулятор прямого действия. Во втором случае увеличение Fпр повышает уровень L, т. е. объект является элементом прямого действия, что требует установки в замкнутом контуре регулирования регулятора обратного действия.
В системах стабилизации заданное значение не изменяется во времени и u = 0, а возмущение z приводит к отклонению регулируемой величины от заданного значения. Поэтому сигнал в такой системе проходит только по каналу z→y. Причем знак этого сигнала не влияет на формирование отрицательной обратной связи в замкнутом контуре.
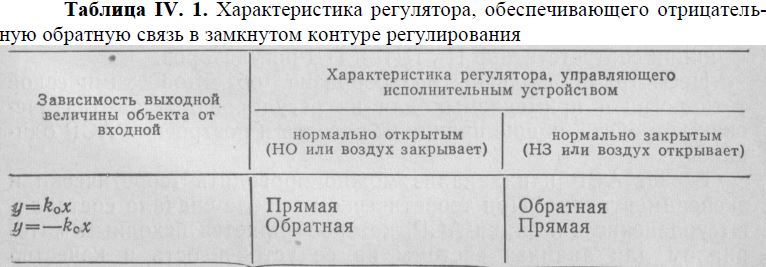
При формировании отрицательной ОС в АСР в общем случае необходимо учитывать направленность действия всех входящих в нее элементов. Обычно измерительные преобразователи системы имеют прямое действие, а исполнительные устройства выбираются по технологическим соображениям и могут быть либо прямого (нормально закрытые НЗ), либо обратного действия (нормально открытые НО). Направленность действия регулятора выбирают с учетом работы объекта и направленности действия измерительного преобразователя и исполнительного устройства. Если в системе используется ИП прямого действия, то для выбора направленности действия регулятора можно воспользоваться данными табл. IV. 1.
Помимо главной в отдельных элементах АСР могут быть и дополнительные ОС, предназначенные для улучшения свойств этих элементов чаще всего регуляторов. Обычно дополнительные ОС также отрицательны. В реальных системах дополнительными ОС, как правило, охватывают цепочки с нестабильными звеньями, имеющими большие коэффициенты усиления k(k→∞). Найдем передаточную функцию W(p) такого соединения. Согласно равенству (I,48)
![]()
где Wпс(p) и Woc(p)—передаточные функции стабильных звеньев прямой и обратной связей. Знак (—) в квадратных скобках знаменателя показывает, что ОС отрицательна. Разделим числитель и знаменатель выражения (IV,14) на k. Пренебрегая в знаменателе малым слагаемым 1/k и сокращая на Wпс(p), получим
![]()
Таким образом, при большом коэффициенте усиления цепи прямой связи динамические свойства системы определяются в основном передаточной функцией цепи обратной связи; такие системы называют предельными.
Этот важный вывод широко используется при формировании законов регулирования промышленных регуляторов. Прямые цепочки регуляторов обычно содержат нестабильные в работе усилители мощности. Поэтому для придания регуляторам конкретных динамических свойств в цепь обратной связи вводят звенья, имеющие заранее известную передаточную функцию, образуя тем самым предельную систему.
Наиболее часто используют жесткую, упругую и инерционную обратные связи. Их уравнения динамики имеют вид
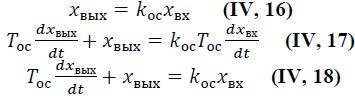
Жесткая ОС представляет собой пропорциональное звено, упругая— реальное дифференцирующее, а инерционная — апериодическое звено 1-го порядка. Жесткая и инерционная обратные связи работают непрерывно, а упругая — только в переходном режиме. Находя передаточные функции этих обратных связей и подставляя их в уравнение (IV,15), получим передаточные функции соответственно П-, ПИ- и ПД-регуляторов.
Несмотря на большое разнообразие объектов химической технологии и применяемых для их регулирования автоматических устройств, общие принципы расчета и построения АСР одинаковы.