

Контроллер машиниста электровоза вл-80с
НАЗНАЧЕНИЕ:предназначен для дистанционного ручного управления реверсорами, контакторами ослабления
поля при движении вперед, набором и сбросом позиций ЭКГ и реостатного торможения.
У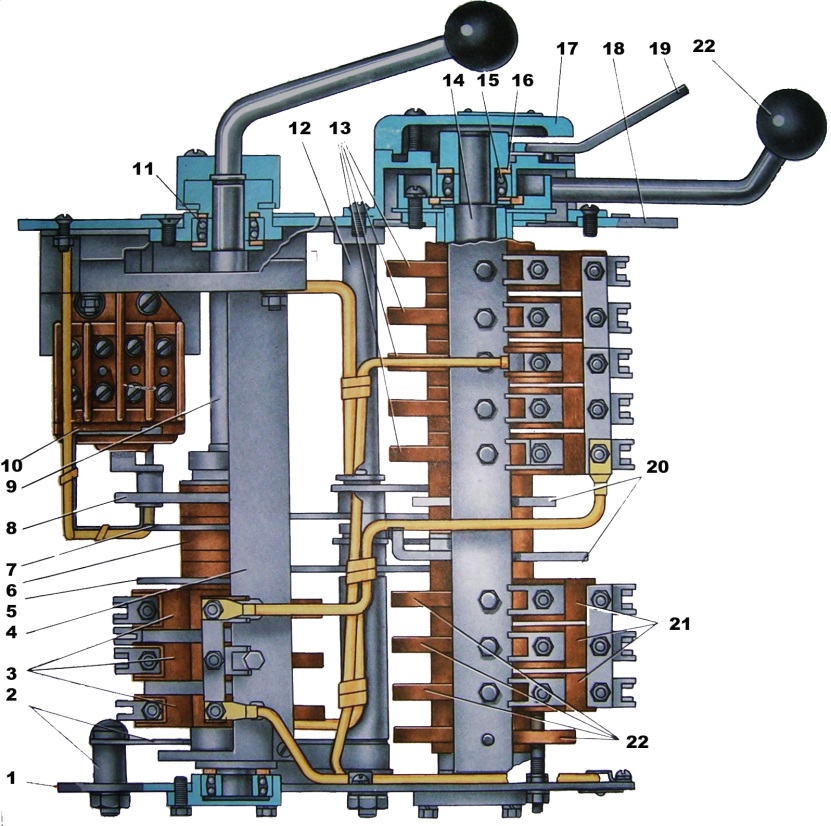 СТРОЙСТВО:
является групповым многопозиционным
аппаратом с ручным управлением. Состоит
из двух оснований или стальных плит 1 и
18 соединенных четырьмя рейками 4, на
которых установлены блокировки КЭ-153.
СТРОЙСТВО:
является групповым многопозиционным
аппаратом с ручным управлением. Состоит
из двух оснований или стальных плит 1 и
18 соединенных четырьмя рейками 4, на
которых установлены блокировки КЭ-153.
В подшипниках 11 и 15 оснований 1 и 18 установлены:
Главный вал14с кулачковыми шайбами 13 имеет не съемную рукоятку 22 на 8 положений, из них два крайних положения «БВ» и «АП» - не фиксированные.
Р
 еверсивный
валпроходит
через полый главный вал 14, имеет 4-е
шайбы 22 и съемную рукоятку 19 на 6
фиксированных положений.
еверсивный
валпроходит
через полый главный вал 14, имеет 4-е
шайбы 22 и съемную рукоятку 19 на 6
фиксированных положений.Т ормозной вал9 имеет три кулачковые шайбы и положения: «0», «П» - подготовка схемы, «ПТ» - предварительное торможение,
« Торможение»
- большой сетор поворота рукоятки,
крайние положения фиксированные.
Торможение»
- большой сетор поворота рукоятки,
крайние положения фиксированные.
Переключатель на 12 положенийрасположен на верхнем основании, служит для регулирования тормозной силы в пределах от 20 до 50 тонн с интервалом 2,5 тонны.
Сельсин – датчик скорости торможения крепится к верхнему основанию 19. Его ротор поворачивается профильной шайбой 8 расположенной на тормозном валу 9 при положении «Торможение» от 120 до 0 км/ч.
В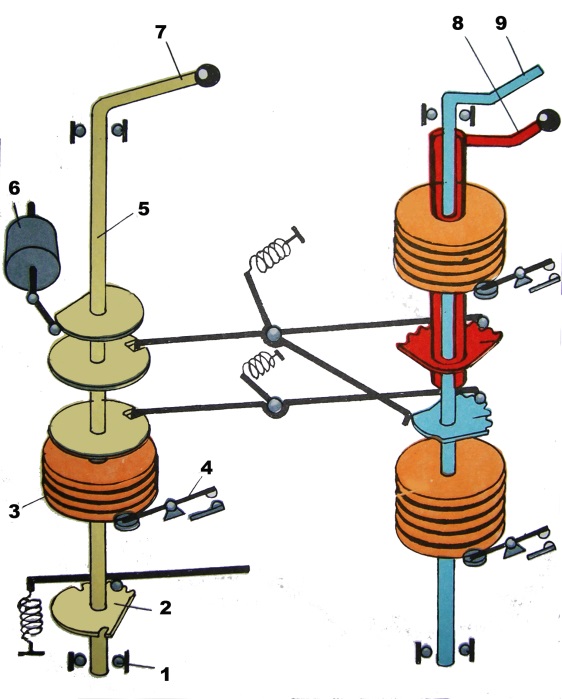 алы
контроллера машиниста имеют механическое
блокирование, которое обеспечивает
управление валами в определенной
последовательности:
алы
контроллера машиниста имеют механическое
блокирование, которое обеспечивает
управление валами в определенной
последовательности:
Невозможно управлять главным 8 и тормозным 7 валами при нулевом положении реверсивного вала 9 или при изъятой реверсивной рукоятке.
При постановке в рабочее положение реверсивного вала 9, невозможно изъять реверсивную рукоятку и при этом:
Можно управлять главной рукояткой 8, но при рабочем положении главной рукоятки невозможно перевести в нулевое положение реверсивный вал 9 и управлять тормозным валом 7.
При нулевом положении главного вала 8 можно управлять тормозным валом, но при рабочем положении тормозного вала 7 невозможно управлять главным и реверсивным валом.
Механическое блокирование производится за счет 2-х и 3-хплечих рычагов, которые входят в вырезы дисков или упираются в диски.
! На электровозах с №2319 установлен контроллер машиниста «КМ-2» у которого:
Снят сельсин – датчик скорости торможения и указатель скорости на пульте.
Переключатель – задатчик тормозной силы имеет 8 положений.
Тормозной вал имеет одно фиксированное положение «Торможение» и дополнительное положение «ФС»
! На электровозах с №2420 установлен контроллер машиниста «КМ-3» у которого:
Тормозная рукоятка в положении «Торможение» имеет 15 фиксированных положения для регулирования тормозной силы в пределах от 20 до 50 тонн с интервалом 2 тонны.
На тормозном валу установлена дополнительная рукоятка на два положения: «0» и «ФС» - фиксация скорости, которая сблокирована с главным валом КМ.
Контроллер машиниста электровоза эп1м
НАЗНАЧЕНИЕ: предназначен для дистанционного ручного управления реверсорами, регулирования силы тяги и торможения.

УСТРОЙСТВО: является групповым аппаратом с ручным управлением. Состоит из двух переключателей кулачкового типа: реверсивного 3 и главного 1 и датчика скорости 9.
В основаниях 2, 5 и 10 установлены:
Реверсивный вал имеет 4 кулачковых элемента и служит для изменения направления движения электровоза и имеет следующие позиции:
«В» - вперед;
«0» - нулевое положение;
«Н» - назад.
Г
 лавный
вал имеет
6 кулачковых элемента и служит для
управления электровозом в режимах
«Тяга» и «Торможение» и имеет следующие
позиции:
лавный
вал имеет
6 кулачковых элемента и служит для
управления электровозом в режимах
«Тяга» и «Торможение» и имеет следующие
позиции:
«Тяга» - зона задания силы тяги;
«П» - подготовка схемы в режиме «Тяга»;
«0» - нулевое положение;
«П» - подготовка схемы в режиме «Рекуперация»;
«Рекуперация» - зона задания силы торможения.
Датчик скорости служит для задания максимальной скорости движения электровоза.
На верхней раме 6 расположены рукоятки реверсивного вала 7, штурвала главного вала 8 и задатчика скорости 9. Фиксация валов на позициях осуществляется при помощи фигурных дисков и рычагов с пружинами. Рукоятка реверсивного вала извлекается в положении «0».
Реверсивный и главный валы имеют механизм блокирования, состоящий из дисков и рычага, который обеспечивает невозможность установки штурвала в рабочее положение при положении «0» реверсивной рукоятки.
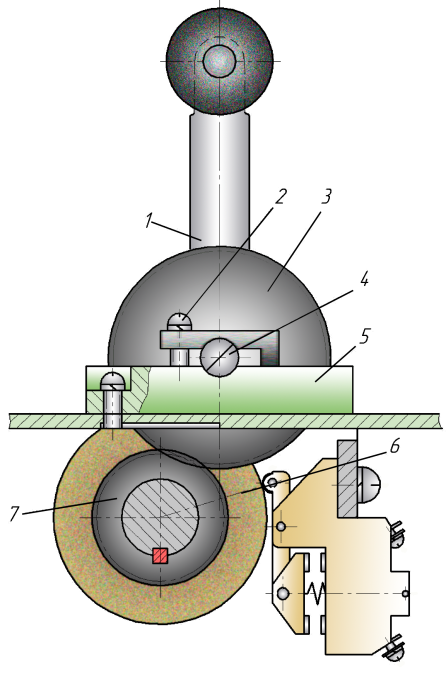
РАБОТА: при перемещении рукоятки штурвала 1, вращается и зубчатое колесо 3, закрепленное на оси 4 в корпусе 5. Зубчатое колесо входит в зацепление с шестерней 7 на главном валу и поворачивает ее. При повороте кулачковых шайб 6 главного вала переключаются кулачковые элементы, обеспечивая сбор цепей управления.