

6. Эталонная модель взаимодействия открытых систем (osi) в организации технологических процессов.
Для того, чтобы
преодолеть трудности, возникающие из-за
большого кол-ва несовместимых стандартов,
международная организация по стандартизации
разработала эталонную модель взаимодействия
открытых систем (OSI
-Open
System
Interconnection).
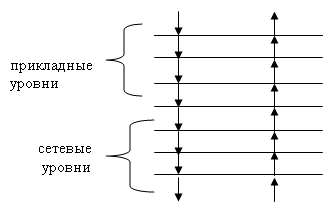
Прикладной уровень
Уровень представления данных
Сеансовый уровень
Транспортный уровень
Сетевой
Канальный
Физический Среда передачи
Эталонная модель OSI предлагает структуру для идентификации и разграничения различных составляющих коммуникационного процесса. Практической целью модели ВОС яв-ся обеспечение совместимости и взаимозаменяемости. Совместимость- означает, что обмен данными не потребует непропорциональных расходов на их преобразование. Взаимозаменяемость- означает, что устройство выпускаемое различными производителями для выполнения одной и той же фун-ии могут заменять друг друга без каких – либо проблем при условии, что их работа основывается на одних и тех же принципах и правилах. В модели ВОС определены 7 функциональных уровней. Каждый уровень на прямую взаимодействует только с непосредственными соседями, запрашивая услуги у ниже лежащего и поставляя их выше лежащему уровню. В модели ВОС определены след.уровни:
Уровень1 – физический уровень. Он представляет собой физ-ую среду передачи (электронную или оптическую) с соответствующими интерфейсами к сопрягаемым объектам (станциям или узлам). Все детали, касающиеся среды передачи уровню сигналов и частот, рассматриваются на этом уровне.
Уровень 2 – канальный. Он обеспечивает ф-ии, связанные с формированием и передачей кадров от одного узла к другому, обнаружением и исправлением ошибок, возникающих на физическом уровне. При появлении ошибки, напр.из-за помех на линии, на этом уровне запрашивается повторная передача поврежденного кадра. В результате канальный уровень обеспечивает верхние уровни услугами по безошибочной передачи данных между узлами. Если несколько устройств исполняют общую среду передачи, то на этом уровне также осущ-ся управление доступом к среде.
Уровень 3 – сетевой. Он устанавливает маршрут и контролирует прохождение сообщений от источника к узлу назначения. Маршрут может состоять из нескольких физ-их сегментов не все из кот-ых связаны непосредственно.
Уровень 4 – транспортный. Он управляет доставкой сообщений от источника к приемнику. Этот уровень представляет собой интерфейс между прикладным ПО, запрашивающим передачу данных и физ-ой сетью, представленной первыми тремя уровнями. Одна из главных задач транспортного уровня – обеспечить независимость верхних уровней от физ-ой структуры сети в частности от маршрута доставки сообщений.
Уровень 5 – сеансовый. Он отвечает за установку, поддержку, синхронизацию и управление соединением (между объектами уровня представления данных). На этом уровне в частности происходит удаленная регистрация в сети.
Уровень 6 – уровень представления данных. Он обеспечивает синтаксическую модель данных, т.е. кодирование и преобразование неструктурированного потока бит в формат понятный приложению получателя или иначе говоря восстановление исходного формата данных – сообщения, текст, рисунок и т.д.
Уровень 7 – прикладной. Это самый верхний уровень на кот-ом решаются собственно-прикладные задачи – передача файлов, операции с распределенными БД и удаленное управление.
Физ-ий уровень- единственный уровень имеющий материальное воплощение, остальные уровни представляют собой наборы правил или описание вызова ф-ии реализованные программными средствами. 3 нижних уровня наз-ся сетевыми или коммуникационными уровнями, поскольку они отвечают за доставку сообщений. Три верхних уровня относятся к прикладному ПО и связаны с содержательной стороной сообщений. 4-ый транспортный уровень осущ-ет связь между коммуникационно -ориентированными и проблемно - ориентированными уровнями.
7. Человеко-машинный интерфейс в системах управления технологическими процессами.
Особенности принятия решений оператором.
Наступившие на современном этапе осознание ключевой роли оператора в ЧМС основано на выявление особенностей процесса принятия управленческих решений человеком-оператором. При этом первостепенном становятся такие характеристики деятельности оператора: действие, операция, планирование, загрузка, исполнение и т.д.
Задачу оператора в автоматизированной системе управления можно свести к наблюдению за поведением объекта, определению момента отхода этого поведения от желаемого и принятию управления на себя.
В отличии от операторов радиолокационных станций или авиадиспетчеров, в чей работе вполне можно определить правильные и неправильные действия, обосновано оценить время решения и влияния ограниченного числа сигналов, операторы сложного технологического процесса решают другие задачи не столько по числу наблюдаемых переменных процессов и органов управления им, сколько из-за неоднозначности определения правильных и ошибочных действий.
Обще признано, что в основе деятельности оператора лежит механизм распознавания образов. Согласно модели принятия решений действие оператора в случае необходимости вмещаться в ход управляемого процесса состоит из обнаружения события, диагностики причин и компенсации его последствий.
Структура ЧМИ.
Появление общей модели принятия решения оператором было вызвано усложнением задачи человека в ЧМС и желанием приспособить ЧМИ к новому качеству деятельности оператора. Многое удалось учесть: многоуровневые технологические схемы процесса, легко вызываемые на экран операторской консоли позволили анализировать ситуацию со степенью детализации, диктуемой решаемой задачей, настраиваемые по глубине исторические тренды давали операторы большой объем информации о поведении динамического процесса.
Тем не менее возникла необходимость привести саму структуру Ч-М взаимодействия в соответствии с резко возросшими требованиями к принимающему решения оператору и возможностям современных информационных технологий.
В частности представления данных гибкость интерфейсов подразумевает возможность конфигурации графических и других информационных форм под особенности технической задачи, принятого стиля управления и даже отдельных операторов. В этом, в частности, состоит одно из ключевых достоинств SCADA-систем.
Широко применяется в современных системах представление информации мультимедийное ПО, нашли теоретическое обоснование и получили распространение групповые и кооперативные интерфейсы для управления несколькими людьми.
Современный диалог в ЧМИ должны отвечать на следующие вопросы: какая информация, когда, в какой форме и почему передаваться от одного компонента системы к другому.
Решение этой универсальной задачи связано с выполнением ключевого принципа создания ЧМИ – участие пользователя во всех этапах разработки интерфейса от определения сценариев представление информации до конечной оценки его дизайна.