

Лабораторна робота № 3
Тема: Рульове керування з підсилювачем.
Мета: Ознайомитися з конструкцією підсилювачів.
Завдання: 1. З автомобіля ВАЗ-2117 (Калина) зняти
електричний підсилювач, його блок керування та
робочу частину, ознайомитись з його будовою та
принципом роботи. Встановити на автомобіль.
Обладнання та матеріали: Автомобіль ВАЗ-2117, електричний
підсилювач керма. Плакати та макети.
Інструмент необхідний для виконання
лабораторної роботи.
Теоретичні відомості Призначення рульового управління. Способи повороту автомобіля
Рульове управління є однією з найважливіших систем управління автомобілем, використовується водієм постійно при русі, робить істотний вплив на безпеку руху і стомлюваність водія. Основне призначення рульового управління - забезпечувати зміну напряму руху.
Оскільки орган управління - рульове колесо - постійно знаходиться в руках водія, воно на сучасних автомобілях виконує також інформаційну функцію - по зусиллях, вібраціям на рульовому колесі відбувається передача водію інформації про протягання дорожнього покриття,завантаженості контакту коліс з дорогою.
Рульове управління автомобіля повинне забезпечувати ту, що відчувається водієм зв’язок між кутом повороту рульового колеса і напрямом руху автомобіля, володіти високою надійністю. Зусилля, необхідні для управління, не повинні приводити до підвищеної стомлюваності водія і в той же час повинні інформувати його про полягання контакту керованих коліс з дорогою (забезпечувати «відчуття дороги»). Від рульового управління залежить мінімальний радіус повороту автомобіля на обмежених площах. Конструкція рульового управління не повинна передавати ударні навантаження від нерівностей дороги на руки водія.
Всі перераховані вище вимоги враховуються при проектуванні рульового управління.
Змінити напрям руху автомобіля можна двома різними способами: за рахунок повороту коліс або ланок автомобіля в горизонтальній площині (кінематичний спосіб) або за рахунок створення на колесах правого і лівого борту різних по величині або по напряму подовжніх сил (силовий спосіб) (мал. 3.1г).
Для управління більшістю сучасних автомобілів застосовується кінематичний спосіб, який може бути реалізований шляхом:
- повороту керованої осі (мал. 3.1а);
- повороту керованих коліс (мал. 3.1б);
- повороту зчленованих ланок (складання рами) (мал. 3.1в) .
Поворот керованої осі - це найстаріший з відомих способів управління. Він застосовувався ще на двовісних гужових возах. При такому способі вісь з колесами поверталася щодо шворні, встановленого в центрі воза. Система управління виходила дуже простою, але вимагала сильного звуження передньої частини кузова для перекочування керованих коліс, не забезпечувала демпфування ударів від нерівностей дороги на органи управління і при граничних кутах повороту осі виникала небезпека бічного перекидання через зменшення площі опори автомобіля.
Для часткового усунення вказаних недоліків намагалися замінити керовану вісь одним колесом, встановленим по центру автомобіля (наприклад, автомобіль К. Бенца. В даний час така схема повороту залишилася на двох- і триколісних транспортних засобах. Поворот керованої осі сьогодні застосовується тільки на причепах.
Принцип управління за рахунок повороту зчленованих ланок застосовується у разі, коли колеса транспортного засобу мають великі розміри і поворот кожного з них утруднений. Несуча система транспортного засобу складається з двох частин, до кожної з якої приєднана передня і задня осі. Обидві частини сполучено один з одним рухомо за допомогою вертикального шворні. Відносний поворот частин («складання» рами або іншої несучої системи) відбувається за допомогою гідравлічних циліндрів рульового управління. До недоліків даної схеми відноситься низька точність управління при високих швидкостях, трудність розміщення кузовів або кабін на двох рухомих частинах рами, ускладнення трансмісії. У зв'язку з цим даний спосіб рульового управління на сучасних автомобілях застосовується рідко, основна сфера використовування -тихохідні трактори, дорожньо-будівельні машини, спеціальні усюдиходи і т.п.
Найбільше розповсюдження в конструкції автомобіля одержало рульове управління з поворотними колесами. В цьому випадку кожне кероване колесо може повертатися в горизонтальній площині щодо власної осі повороту. Для синхронізації повороту правого і лівого колеса однієї осі вони зв'язані шарнірним механізмом - рульовою трапецією.
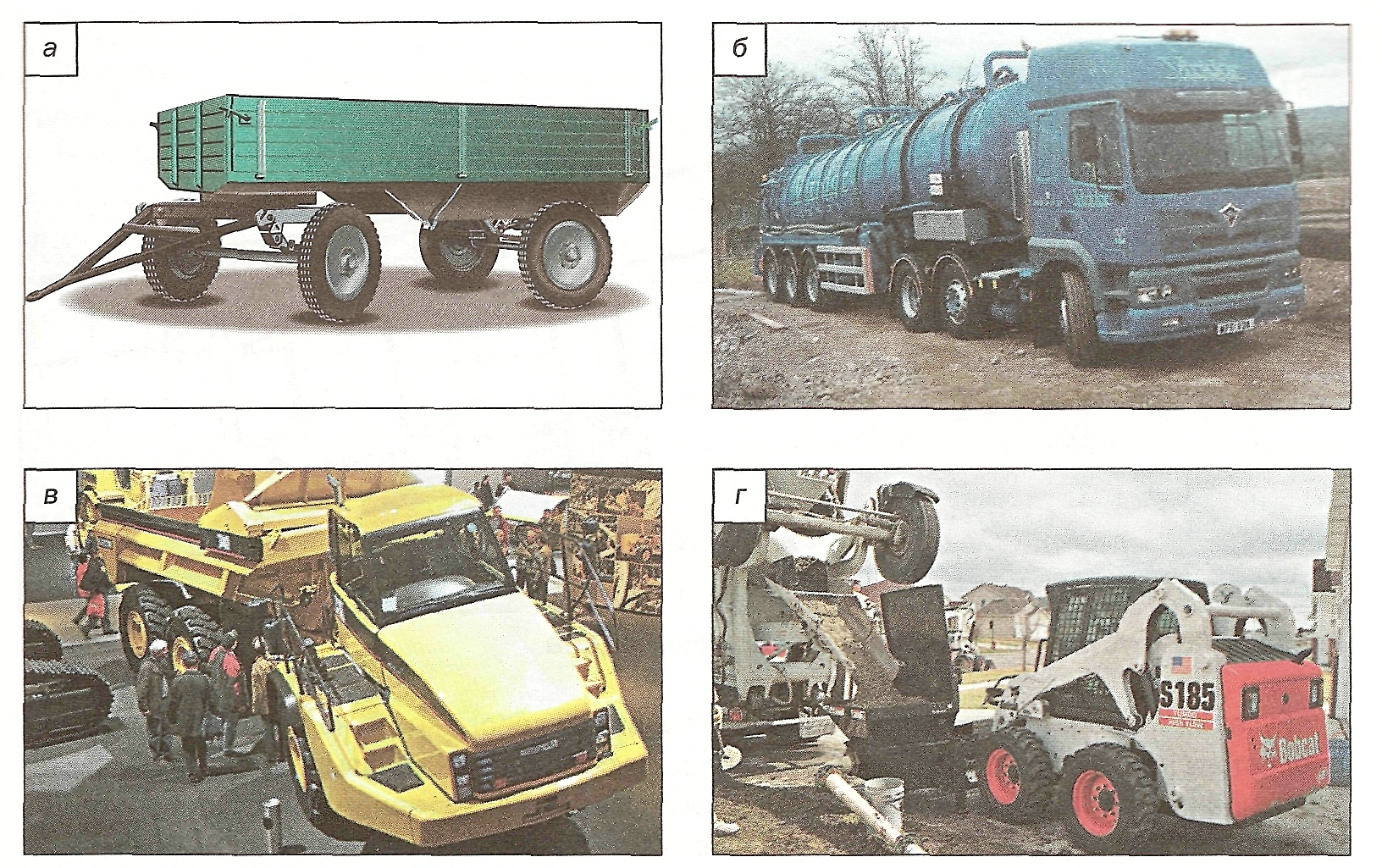
Мал. 3.1.
Способи повороту колісної машини:
а - за рахунок повороту осі; 6 - за рахунок повороту керованих коліс; в - складанням рами; г - силовим способом
Рульова трапеція забезпечує поворот правого і лівого коліс на різні кути, що дозволяє їм котитися на повороті по різних радіусах без прослизання.
Основні переваги вказаної схеми повороту: колеса займають при поворотах невеликий об'єм усередині кузова, що дозволяє зручно розміщувати над керованим мостом інші агрегати автомобіля (двигун, трансмісію і т. д.); для повороту коліс потрібні незначні зусилля, близьке розташування колеса коси його повороту зменшує удари, що передаються від дороги на рульове управління.
Двовісний автомобіль має, як правило, одну передню вісь з керованими колесами. Іноді для поліпшення маневреності такі автомобілі забезпечують всіма керованими колесами, але при цьому ускладнюється конструкція рульового управління і виникають проблеми з керованістю на високих швидкостях. Тому на автотранспортних засобах з передніми і задніми керованими колесами при русі з високими швидкостями примусове управління задніми колесами відключають, а колеса фіксуються в нейтральному положенні.
Для сучасних швидкісних легкових автомобілів конструкція підвіски задніх некерованих коліс і наявність пружних гумометалевих шарнірів кріплення важелів до несучої системи забезпечує при русі на повороті незначні кути повороту коліс через крен кузова і дії на колеса бічних сил. Це явище називається «доворотом» некерованих коліс і при правильно спроектованій підвісці дозволяє поліпшити керованість в швидкісних поворотах.
Одну вісь з керованими колесами можуть мати і тривісні автомобілі, але за умови, що друга і третя некеровані осі зближені. Якщо ці осі рознесені або автомобіль має більше трьох осей, то для запобігання бічного прослизання коліс застосовують декілька осей з керованими колесами.
При цьому водій безпосередньо повертає колеса першої осі, колеса інших осей пов'язані з першою віссю за допомогою механічних, гідравлічних або електрогідравлічних передач, які управляють їх поворотом. Керовані колеса напівпричепів можуть повертатися залежно від кута складання між автомобілем-тягачем і напівпричепом або двома частинами зчленованих автобусів.
У ряді випадків для спрощення конструкції рульового управління задні поворотні колеса многоосных автомобілів і причепів робляться тими, що само встановлюються, тобто колеса на повороті самі повертаються на кути, при яких на їх не впливають бічні сили (мал. 3.2).
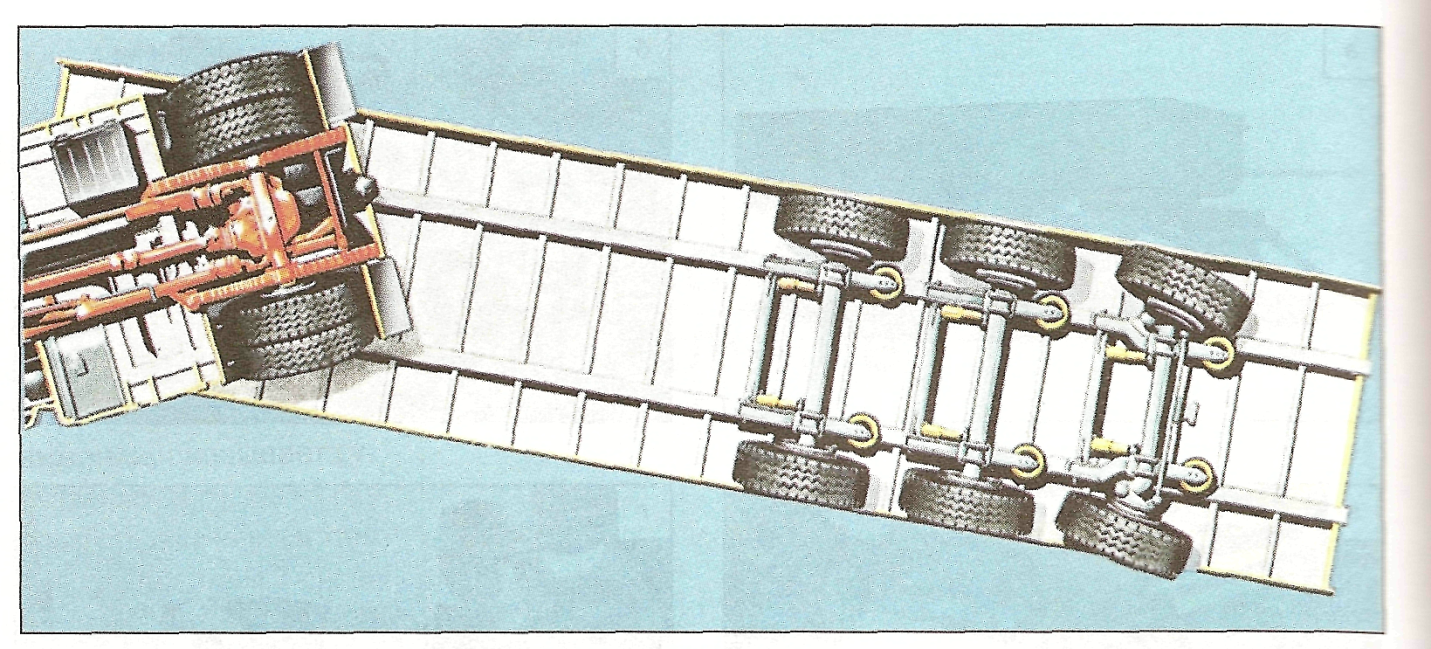
Мал.3.2
Вісь напівпричепа, що само встановлюється.
Силовий спосіб повороту автомобіля аналогічний способу поворотів гусеничних машин. При цьому способі функції рульового управління виконує спеціальна трансмісія. При дії водія на органи управління трансмісія пригальмовує колеса одного борту з подачею тягових сил на колеса іншого, що викликає появу моменту сил правого і лівого борту, який прагне повернути машину щодо вертикальної осі. Така схема управління забезпечує поворот практично на місці. Але силовий спосіб управління на сучасних автомобілях майже не застосовується, що пов'язане з низькою точністю управління на великих швидкостях, високим зносом шин, необхідністю встановлювати двигуни підвищеної потужності і складні трансмісії.
Разом з тим силовий спосіб управління поворотом все ж таки застосовується в сучасних автомобілях, але не як основне, а як основа функціонування електронної системи стабілізації траєкторії ESP.