

Содержание:
Задание…………………………………………………………………....4
Реферат…………………………………………………………………....5
Введение…………………………………………………………………..6
1 Кинематический расчет привода главного движения…………….….7
1.1 Выбор электродвигателя………………………………………...….7
1.2 Построение структурной сетки и графика частот вращения
шпинделя…...............................................…………………………8
1.3 Разработка кинематической схемы привода и расчет чисел
зубьев зубчатых передач…………….………..……………………11
2 Силовой расчет привода главного движения………………..……13
2.1 Расчет мощностей и крутящих моментов предаваемых валами.13
2.2 Предварительный расчет диаметров валов……………………..14
2.3 Расчет модулей зубчатых колес………………………………….15
2.4 Расчет геометрических параметров зубчатых колес……………18
Заключение……………………………………………………………...20
Список используемых источников…………………………………….21
Задание.
Спроектировать привод главного движения горизонтально-фрезерного станка по типу базового:
Модель базового станка- 6Н82.
Исходные параметры станка.
Привод главного движения:
Тип привода - ступенчатый
Передаваемая мощность N=3 кВт
Число скоростей главного движения 16
Пределы об/мин шпинделя 45-1600 об/мин.
Реферат
Пояснительная записка содержит 21 лист, 5 рисунков, 1 таблицу.
В курсовой работе произведен расчет и проектирование привода главного движения горизонтально-фрезерного станка по типу базового модели 6Н82.
Введение.
Приводы главного движения современных металлорежущих станков могут быть с бесступенчатым, ступенчатым и комбинированным изменением частот вращения шпинделя. В настоящее время наибольшее распространение получили ступенчатые и комбинированные способы изменения частот вращения шпинделей.
Расчет привода состоит из двух основных этапов - кинематического и силового. На этапе кинематического расчёта определяются минимальные и максимальные частоты вращения шпинделя, диапазон частот вращения, геометрический ряд изменения частот вращения, знаменатель ряда, число скоростей (ступеней). Кроме этого, определяются: частота вращения ротора электродвигателя и его диапазон регулирования; передаточные отношения червячных передач. Также определяются виды передач от электродвигателя к входному валу коробки скоростей и при необходимости диаметры шкивов ременных передач.
1 Кинематический расчет привода главного движения.
Выбор электродвигателя.
Мощность двигателя может быть определена, если известен КПД привода. В свою очередь, КПД привода может быть определен как произведение КПД отдельных передач и опор, входящих в кинематическую схему привода.
По условию передаваемая шпинделем мощность равна 4кВт. Отсюда мощности, передаваемые каждым валом с учетом КПД подшипников, ременной и зубчатых передач:
η=ηп\ш5× ηрп× ηЗ4=0.995×0.95×0.974=0.8
Nэд= Nэф/ η=3/ 0.8=3.75кВт;
Принимаем Nэд=5.5 кВт.
N1=5.5 кВт;
N2=N1×ηрп=5.227 кВт;
N 3= N 2×ηЗ ×ηп\ш=5.019 кВт;
N 4= N 3×ηЗ ×ηп\ш=4.820 кВт;
N 5= N 4×ηЗ ×ηп\ш=4.629 кВт;
N 6= N 5×ηЗ ×ηп\ш=4.445 кВт.
где ηп\ш =0,99 – КПД подшипника
ηз =0,97 – КПД закрытой зубчатой передачи
ηрп=0,95-КПД ременной предачи
По таблице принимаем двигатель с мощностью 5,5 кВт, и частотой вращения ротора 1350 об/мин АИР112М4У2.
Построение структурной сетки и графика частот вращения шпинделя.
Передаточные отношения, градация их и частот вращения всех валов привода могут быть выражены в форме степеней знаменателя ряда φ частот вращения шпинделя. Поэтому кинематические связи привода удобно изображать графически на логарифмических шкалах с постоянным интервалом между соседними точками шкалы, равным lg φ.
Формула структуры групповых передач:
z=2×2×2×2
Знаменатель ряда φ определяется:
 ,
,
где zk- число скоростей zk=16;
nmax- максимальная частота вращения шпинделя nmax=1400 об/мин;
nmin- минимальная частота вращения шпинделя nmin=50 об/мин;
 .
.
Структурная сетка строится следующим образом: проводится ряд параллельных прямых – горизонталей с интервалом lg φ в количестве, равном z и ряд вертикалей, для каждой группы передач отводится поле между двумя смежными вертикалями в порядке конструктивного расположения группы вдоль цепи передач. Характеристика группы x определяется как число скоростей в предыдущей группе. На левой вертикали поля первой группы наносится точка 0, расположенная симметрично относительно горизонталей. Против этой отметки на правой вертикали поля группы располагаем симметрично столько отметок, сколько передач имеет группа с расстояниями между концами равным характеристике этой группы, выраженной в долях lgφ . Полученные точки соединяем прямыми лучами с точкой 0. В поле второй группы из каждой отметки на левой вертикали поля проводим симметрично столько лучей, сколько передач в группе с расстоянием между концами лучей, равным х2.

Рисунок 1. Структурная сетка привода
главного движения.
График частот вращения строится в соответствии с кинематической схемой привода. Каждому валу отвечает вертикальная прямая графика, горизонтальные прямые с одинаковым интервалом lgφ показывают числа оборотов вала от nmin до nmax. Передаточные отношения выражаются в виде φm , где m- число интервалов между горизонталями перекрытых лучом.
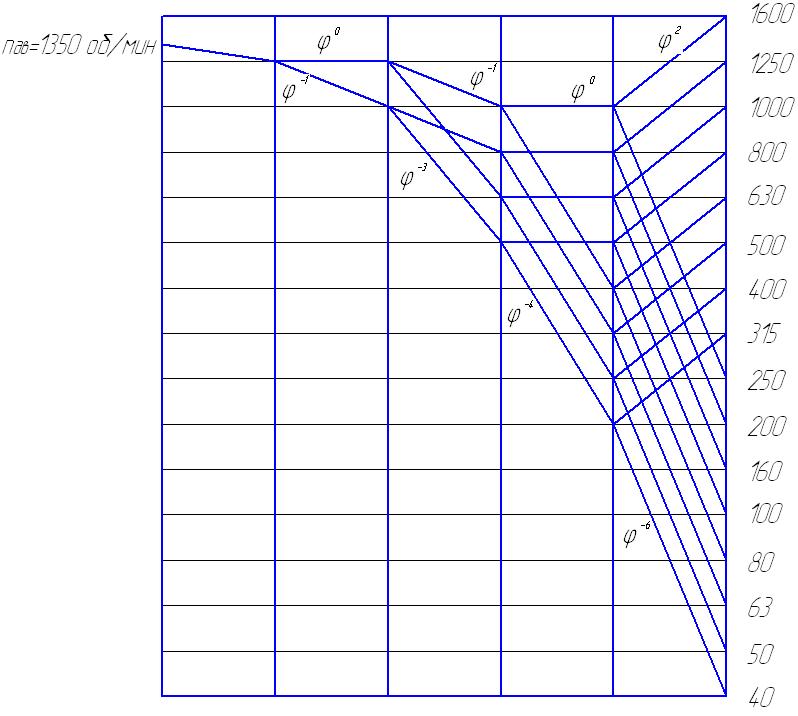
Рисунок 2. График частот вращения.