

3.5. Третий раздел: «Разработка логической схемы дискретного устройства телерегулирования напряжения (синтез)»
3.5.1. Словесное описание задачи телерегулирования напряжения в электротяговой сети
Требуется разработать логическую схему устройства телерегулирования напряжения в электротяговой сети для заданного участка железнодорожной линии постоянного тока напряжением 3 кВ с определенным количеством межподстанционных зон (например – трех зон) при различных ситуациях формирования тяговых нагрузок на каждой из межподстанционных зон.
Алгоритм телерегулирования напряжения должен быть энергоэкономичным и обеспечивать включение устройств регулирования на тяговых подстанциях только по питающим линиям контактной сети, смежным для межподстанционных зон, на которых требуется поддержание напряжения у токоприёмников высокоскоростных поездов не ниже минимального допустимого уровня и не выше максимального значения допустимого для шин тяговых подстанций.
Устройство также должно обеспечивать отображение на рабочем месте энергодиспетчера обобщенной информации о снижении уровня напряжения ниже допустимого для всех межподстанционных зон.
В проекте ограничимся рассмотрением той части системы телерегулирования напряжения, которая формирует сигнализацию о понижении уровня напряжений в контролируемых точках и выдает команды управления на повышение напряжения на шинах подстанции.
3.5.2. Обозначение независимых логических переменных и логических функций при разработке дискретного устройства
Логическая часть устройства телерегулирования должна содержать логические схемы, обеспечивающие решение логических уравнений. На рис.3.6 приведена схема телерегулирования напряжения для варианта участка высокоскоростной линии с тремя межподстанционными зонами.

Рис. 3.6. Структурная схема устройства телерегулирования напряжения
На схеме обозначены три логические схемы ЛС1, ЛС2 и ЛС3, которые требуется разработать.
Датчики напряжения в нашем случае будут вырабатывать сигналы о состоянии уровня напряжения в контролируемых точках. Пусть датчики способны различать три состояния: ниже нормы, выше нормы, в норме. Для кодирования этих трех состояний при двоичном кодировании для каждого датчика потребуется два двоичных разряда z2z1.
В качестве входных данных для схем ЛС1, ЛС2 используются логические переменные x1, x2, x3. Каждая из этих логических переменных может принимать два значения LOG1 – напряжение в контролируемой точке ниже нормы и LOG0 – напряжение в контролируемой точке не ниже нормы.
Закон кодирования для каждого датчика напряжения и правило вычисления логического сигнала Х приведены в таблице 2.
Таблица 2
Правило кодирования логического сигнала о понижении напряжения
Z |
X |
Состояние |
|
Z2 |
Z1 |
||
0 |
0 |
0 |
В норме |
0 |
1 |
1 |
Ниже нормы |
1 |
0 |
0 |
Выше нормы |
1 |
1 |
0 |
Не определено |
Схема ЛС1 должна формировать сигналы, отражающие информацию сигнализации на ДП о тех межподстанционных зонах, на которых уровень напряжения снизился ниже минимального допустимого значения. На вход ЛС1 из каналов связи ТИ через ЛС3 подаются сигналы от датчиков напряжения DH1…DH3, которые обрабатываются ЛС3 путем формирования логических переменных x1, x2, x3.
На выходе ЛС1 формируются зависимые логические переменные (логические функции), принимающие логическое значение LOG1:
S1=f1(x1, x2, x3) – о необходимости повышения напряжения в одной из трех межподстанционных зон;
S2=f2(x1, x2, x3) – то же на двух зонах;
S3=f3(x1, x2, x3) – то же на трех зонах.
Схема ЛС2 должна формировать сигналы, задающие команду на повышение уровня напряжения на шинах подстанций. На вход схемы также подаются переменные x1, x2, x3.
На выходе ЛС2 формируются логические функции, принимающие логическое значение LOG1 (требуется повышение напряжения) или LOG0 (не требуется повышение напряжения). При этом значение LOG1 используется для формирования команд:
F11=f4(x1, x2, x3) – о включении на тяговой подстанции ТП1 первого выпрямительного агрегата на повышение уровня напряжения;
F12=f5(x1, x2, x3) – то же на ТП1 второго агрегата;
F21=f6(x1, x2, x3) – то же на ТП2 первого агрегата;
F22=f7(x1, x2, x3) – то же на ТП2 второго агрегата;
F31=f8(x1, x2, x3) – то же на ТП3 первого агрегата;
F32=f9(x1, x2, x3) – то же на ТП3 второго агрегата;
F41=f10(x1, x2, x3) – то же на ТП4 первого агрегата;
F42=f11(x1, x2, x3) – то же на ТП4 второго агрегата.
3.5.3. Формулирование логической задачи (словесное задание логической функции)
Задача телесигнализации (оценка протяженности зоны пониженного напряжения):
Логические функции s1, s2, s3 принимают значение LOG1 («1») тогда и только тогда, когда независимые переменные x1, x2, x3 принимают значение LOG1 («1») соответственно для одной применить x1, или x2, или x3; двух переменных x1, x2 или x2, x3; для трех переменных x1, x2, x3.
Задача телеуправления:
Логические функции Fij (F11, F12, F21, F22, F31, F32, F41, F42) принимают значение LOG1 («1») тогда и только тогда, когда возникает необходимость повышения напряжения на соответствующей зоне, отображаемой независимой переменной x1, или x2, или x3, принимающей значение LOG1 («1»). Функция повышения напряжения Fij принимает значение LOG1 («1»), если ее индексы i, j соответствуют номеру управляемого выпрямителя (j) на тяговых подстанциях, смежных с контролируемой зоной и соответствующим номером (i).
3.5.4. Составление таблицы истинности
Таблицы 3 и 4 иллюстрируют пример составления таблиц истинности для телеуправления по словесному заданию логической функции (вариант трех межподстанционных зон).
Таблица 3
Таблица истинности для задачи сигнализации
№ п/п |
Наборы независимых логических переменных |
Логические функции |
||||
x3 |
x2 |
x1 |
S1 |
S2 |
S3 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
2 |
0 |
1 |
0 |
1 |
0 |
0 |
3 |
0 |
1 |
1 |
0 |
1 |
0 |
4 |
1 |
0 |
0 |
1 |
0 |
0 |
5 |
1 |
0 |
1 |
0 |
1 |
0 |
6 |
1 |
1 |
0 |
0 |
1 |
0 |
7 |
1 |
1 |
1 |
0 |
0 |
1 |
Таблица 4
Таблица истинности для задачи телеуправления
№ п/п |
Наборы независимых логических переменных |
Логические функции |
||||||||||
x3 |
x2 |
x1 |
F11 |
F12 |
F21 |
F22 |
F31 |
F32 |
F41 |
F42 |
||
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
1 |
0 |
1 |
1 |
|
|
|
|
0 |
|
2 |
0 |
1 |
0 |
0 |
|
|
1 |
1 |
|
|
0 |
|
3 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
|
|
0 |
|
4 |
1 |
0 |
0 |
0 |
|
|
|
|
1 |
1 |
0 |
|
5 |
1 |
0 |
1 |
0 |
1 |
1 |
|
|
1 |
1 |
0 |
|
6 |
1 |
1 |
0 |
0 |
|
|
1 |
1 |
1 |
1 |
0 |
|
7 |
1 |
1 |
1 |
0 |
1 |
1 |
1 |
1 |
1 |
1 |
0 |
|
3.5.5 Переход от таблиц истинности к структурным формулам
Предварительная обработка данных датчика
При логической обработке состояния
уровня напряжения интересующий нас
сигнал по таблице 2 может быть определен
как X= *Z1.
*Z1.
Задача телесигнализации
Для функции S1 в таблице 3 имеются три минтерма: для наборов переменных с номерами 1,2 и 4.
Следовательно, эта функция запишется как дизъюнкция трех элементарных конъюнкций:

Соответственно для двух других функций S2 и S3:


Задача телеуправления
Для функций F11 и F42 в таблице 4 нет минтермов. Их значение F11=0, F42=0.
Для остальных функций имеется в таблице 4 по четыре митерма. Их запись будет соответственно иметь следующий вид:



3.5.6. Минимизация функций и преобразование к заданному логическому базису
Структурные формулы имеют несложную структуру, поэтому для минимизации применяем метод алгебраических преобразований. В качестве базиса для примера примем функционально полный набор ЛЭ: И, НЕ. Функции S1, S2, S3 можно без упрощений преобразовать к базису И, НЕ, используя правило инверсии (Теорему Де Моргана).


Задача телеуправления
Функция Fi,j после преобразований принимает простейший вид:



Функции тривиальны дальнейших преобразований не требуют
3.5.7. Переход от структурных формул к логическим схемам
Осуществляется в соответствии с правилом перехода от логических функций (ЛФ) к логическим схемам (ЛС): ЛС строится от входа к выходу в порядке выполнения логических операций, определяемом правилами алгебры логики, с применением ЛЭ (см. Приложение 3) и функциональных элементов комбинационных схем (см. Приложение 4).
Реализация схемы, в соответствии с преобразованными к базису И, НЕ структурными формулами, приведена на рис.3.7. Для реализации требуются инверторы и трехвходовые элементы И.
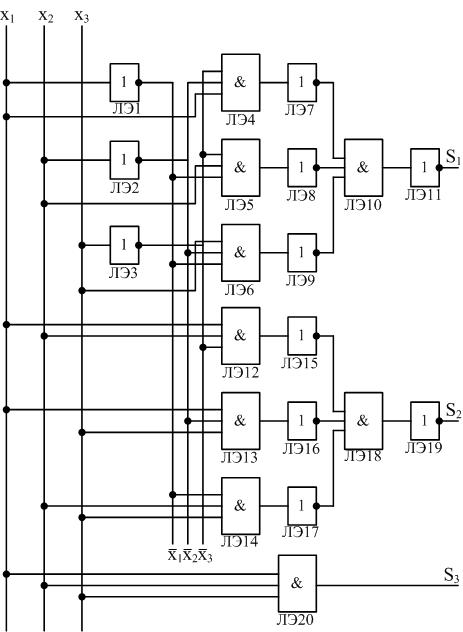
Рис.3.7. Реализация логической схемы ЛС1 в элементном базисе И, НЕ с помощью логических элементов ЛЭ1…ЛЭ20
Задача телеуправления
Реализовать получение сигналов при управлении на повышение напряжения на шинах подстанций для соответствующих зон можно разными простыми способами, например, используя по два последовательно включенных инвертора для каждой выходной функции. Но предпочтительно использовать простые программируемые логические матрицы (ПЛМ).
В рассматриваемом примере можно принять ПЛМ с тремя входами (х1,х2,х3; s=3) и шестью выходами (F12,F21,F22,F31,F32,F41;t=6) Условное графическое обозначение такой матрицы приведено на рис.3.8.
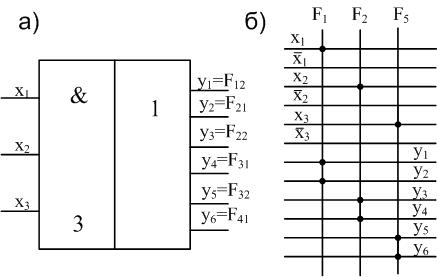
Рис.3.8. Реализация логической схемы ЛС2: а) посредством ПЛМ (s=3, h=6,t=6); б) программирование ПЛМ