

Введение
Отмечается актуальность проблемы повышений скорости движения на железнодорожном транспорте, и приводятся требования к системе тягового электроснабжения по обеспечению скоростного и высокоскоростного электроподвижного состава (ЭПС) электрической энергией высокого качества. Подчеркивается, что важнейшим показателем качества электроэнергии в электротяговой сети является стабильность уровня напряжения у токоприемников ЭПС.
Формируется цель курсового проекта и дается краткое пояснение, какой способ поддержания заданного напряжения в электротяговой сети предлагается в данном курсовом проекте.
Приводятся исходные данные, изложенные в задание как курсовому проекту.
Дается краткая аннотация содержания разработанного студентом курсового проекта.
Первый раздел «Система диспетчерского управления напряжением в электротяговой сети»
В первый раздел рекомендуется включить краткую информацию о современных технологиях управления устройствами тягового электроснабжения, выбор участка высокоскоростной электрифицированной линии в соответствии с заданием на курсовой проект, обоснование системы управления напряжением в электротяговой сети, формирование задач, которые нужно решить в курсовом проекте для достижения поставленной цели.
Современные технологии управления устройствами электроснабжения
Оперативное управление объектами электроснабжения, расположенными на железнодорожной линии (высоковольтные выключатели, преобразовательные агрегаты, разъединители с моторным приводом и другие аппараты и агрегаты тяговых подстанций, различных линейных пунктов, контактной сети), осуществляется энергодиспетчерами, находящимися на диспетчерском пункте, как правило, расположенном рядом с диспетчером по управлению движением.
С энергодиспетчерского пункта по устройствам связи посылаются приказы на контролируемые пункты о необходимых переключениях силового электрооборудования. Эти приказы направляются по назначению вручную путем передачи телефонограммы, либо с помощью специальных устройств управления на расстоянии – телеуправлению. Сведения о фактическом состоянии объектов электроснабжения поступают к энергодиспетчеру по устройствам телесигнализации и телеизмерений. В устройства телемеханики включают часть автоматических блоков, вырабатывающих ряд функций управления без участия энергодиспетчера. На современных диспетчерских пунктах применяются также автоматизированные рабочие места (АРМ). В настоящее время электрические железные дороги оснащены такими автоматизированными системами управления, в которых наиболее ответственные операции выполняются оператором, а часть – выполняются автоматически в зависимости от состояния объектов.
В курсовом проекте следует привести схемы расположения объектов на линии и схему питания электротяговой сети (см. пример на рис.3.1). Дать краткий анализ технологии управления устройствами электроснабжения на данном участке. Полезно также привести фрагмент схемы расположения объектов электроснабжения (см. рис.3.2).
Обоснование системы управления напряжением в электротяговой сети
Напряжение в электротяговой сети при нагрузке от электропоездов в различных точках по длине межподстанционной зоны неодинаково: выше в близи тяговых подстанции и несколько снижается в середине межподстанционной зоны ближе к посту секционирования. Наиболее достоверная оперативная информация об уровне напряжения у токоприемников движущихся поездов фиксируется измерительными приборами, устанавливаемыми на ЭПС. Вместе с тем, передача этой информации к объектам управления технически сложна. В проекте предусматривается контроль уровня напряжения у постов секционирования, расположенных примерно в середине межподстанционной зоны.
Наибольшее снижение напряжения ожидается в точке контактной сети, удаленной от подстанции на одну треть межподстанционной зоны. Ближайшим линейным устройством тягового электроснабжения, для этой точки является пост секционирования.
В проекте рекомендуется принять вариант установки датчиков напряжения в электротяговой сети в зоне, расположенной вблизи постов секционирования. Информация с датчиков напряжения по каналам обратной связи ЛС-ТИ-ТС передается в центральный пункт управления – диспетчерский пункт. Эта информация проходит логическую обработку в специальном, встроенном в телемеханический полукомплект ТУ-ТС-ТИ-ДП, дискретном логическом устройстве. В результате обработки информации формируются сведения об уровне напряжения на всех межподстанционных зонах, а в режимах отклонения напряжения от установленных уровней по каналам прямой связи (по линии связи ЛС-ТУ) передаются сигналы на соответствующие объекты управления (ОУ1, ОУ2) тяговых подстанций. Сборные шины тяговых подстанций секционированы. Питание на левые и правые плечи электротяговой сети подается независимо.
Таким образом, достигается телерегулирование напряжения в электротяговой сети при пропуске высокоскоростных электропоездов.
16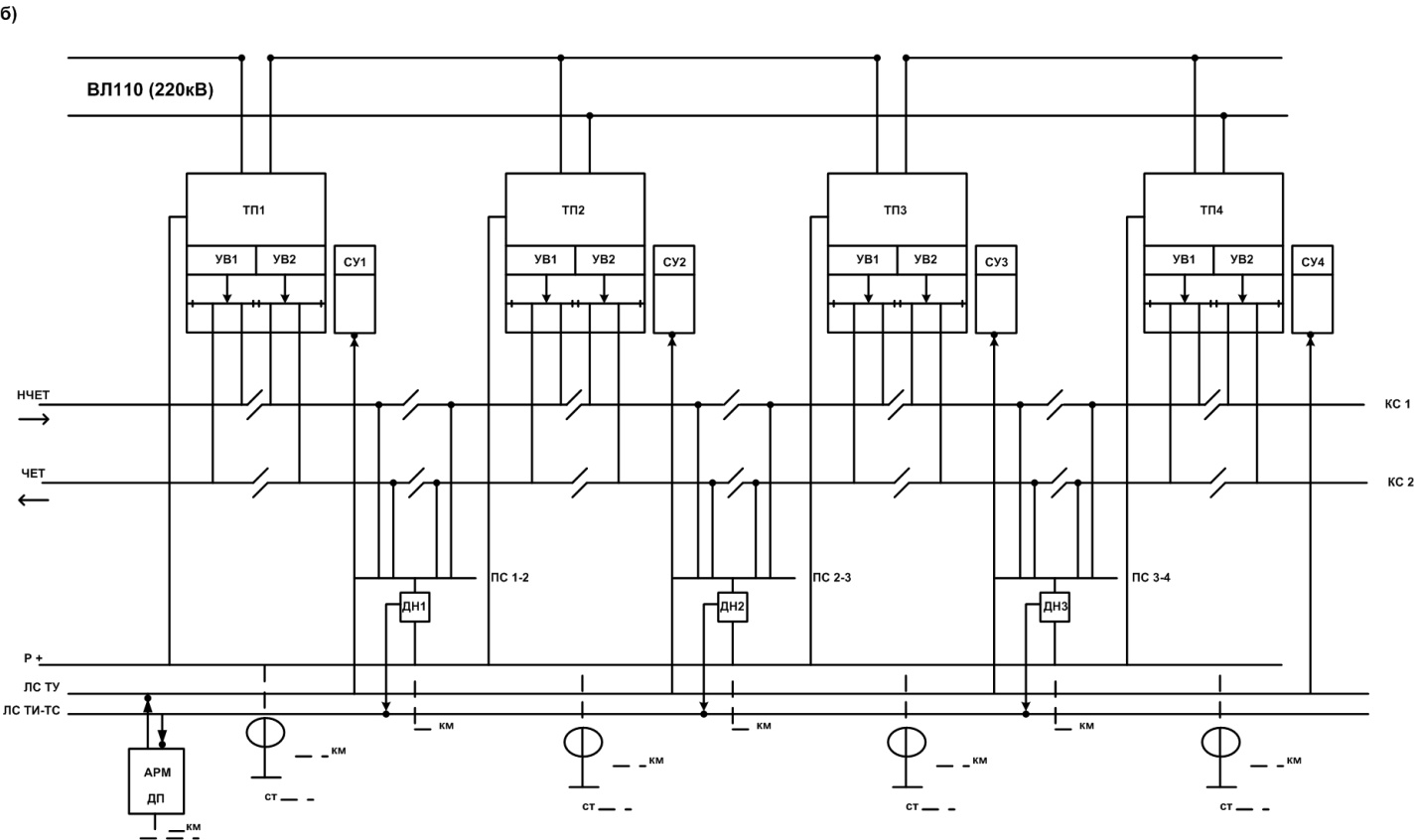
 Рис.
3.1. Упрощенная схема питания и
секционирования электротяговой сети
(ТП1..СП4 – тяговые подстанции; УВ1, УВ2 –
управляемые выпрямители; СУ1..СУ4 – схемы
управления тиристорами выпрямителя;
КС1, КС2 – контактные сети нечетного и
четного пути; ПС1-2, ПС2-3, ПС3-4 – посты
секционирования; ДН1..ДН3 – датчики
напряжения; р – рельсовая сеть; ЛС ТУ,
ЛС ТИ – ТС – линии связи телеуправления
и телеизмерения – телесигнализации;
ДП – энергодиспетчерский пункт)
Рис.
3.1. Упрощенная схема питания и
секционирования электротяговой сети
(ТП1..СП4 – тяговые подстанции; УВ1, УВ2 –
управляемые выпрямители; СУ1..СУ4 – схемы
управления тиристорами выпрямителя;
КС1, КС2 – контактные сети нечетного и
четного пути; ПС1-2, ПС2-3, ПС3-4 – посты
секционирования; ДН1..ДН3 – датчики
напряжения; р – рельсовая сеть; ЛС ТУ,
ЛС ТИ – ТС – линии связи телеуправления
и телеизмерения – телесигнализации;
ДП – энергодиспетчерский пункт)
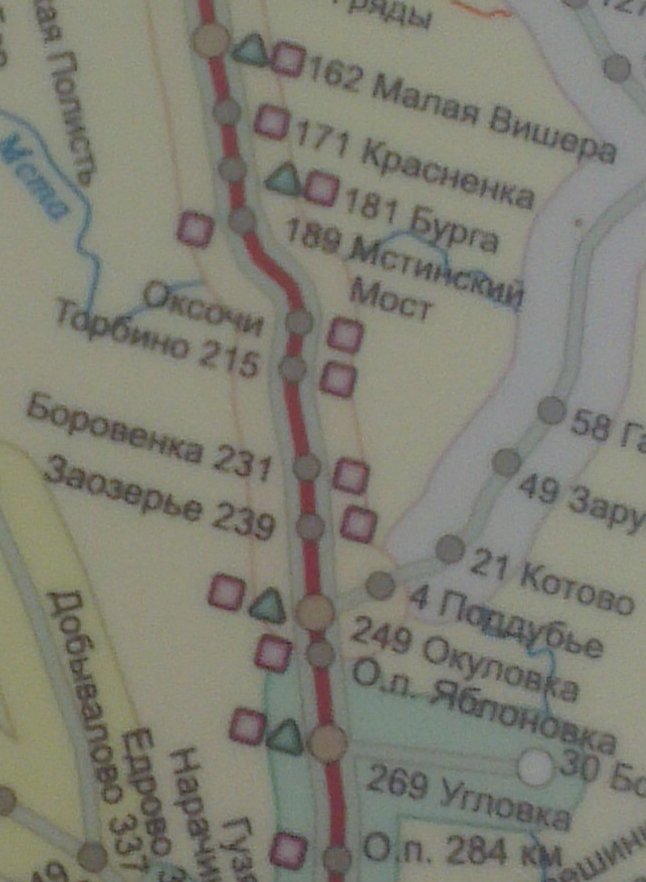
Рис.3.2. Схема расположения объектов тягового электроснабжения
3.3.3. Задачи курсового проекта
В соответствии с предложенным способом телерегулирования напряжения в электротяговой сети на участке электроснабжения высокоскоростной линии для достижения поставленной цели в курсовом проекте необходимо решить следующие задачи синтеза дискретного устройства регулирования напряжения :
дать теоретическое обоснование формы сигналов при передаче информации по каналам прямой и обратной связи в системе телерегулирования напряжения;
составить словесное описание функционирования дискретного цифрового устройства управления напряжением в электротяговой сети;
решить задачу синтеза комбинационной логической схемы устройства управления напряжением в электротяговой сети;
предложить конструктивное исполнение блока дискретного устройства для системы телерегулирования напряжения.
Второй раздел «Получение, преобразование и передача сигналов по каналам связи в системе телерегулирования напряжения в электротяговой сети»
Получение сигналов, отображающих передаваемое сообщение об уровне напряжения на межподстанционной зоне
В системе управления напряжением посредством телемеханических устройств происходит передача на значительное расстояние сообщений от контролируемых пунктов (ТС-ТИ-КП) на диспетчерский пункт (ТС-ТИ-ДП) об уровне напряжения в контактной сети и от диспетчерского пункта (ТУ-ДП) на контролируемый пункт (ТУ-КП) при необходимости повышения (или понижения) напряжения на шинах подстанции. Такой способ управления соответствует технологии телерегулирования напряжения в электротягой сети.
Для передачи сообщения телемеханическим способом необходим переносчик информации, который по линии связи с заданной скоростью и с наименьшими искажениями будет доставлять получателю адресованное ему сообщение. В телемеханике в качестве таких переносчиков обычно используются электрические сигналы в виде импульсов переменного тока (амплитуда, длительность, частота или фаза которого могут изменяться под воздействием сообщения).
В проекте принимаются следующие дискретные сообщения:
уровень напряжения в контактной сети ниже минимального допустимого значения («1»), выше номинального («0»);
включение устройства регулировании на повышение напряжения («1»), включение устройства регулирования на понижение напряжения («0»).
Для надежной передачи сообщений с заданной скоростью сигналы преобразуются в наиболее эффективный для передачи вид. Процесс преобразования сигнала для передачи сообщения по линии связи из одной формы в другую, производимой по определенному закону или правилу, называется кодированием. При построении кодов применяют двоичную систему исчисления и называют коды двоичными. В данном проекте принимается простейший одноразрядный код.
В качестве параметра импульсных сигналов принимается частота переменного тока:
сигналу
«1» соответствует частота
 ;
;
сигналу
«0» – частота
 .
.
Здесь
![]()
 –
среднее значение несущей частоты канала,
Гц, принимается из диапазона от 450 Гц до
3200 Гц с шагом fнес=180
Гц;
–
среднее значение несущей частоты канала,
Гц, принимается из диапазона от 450 Гц до
3200 Гц с шагом fнес=180
Гц; ![]()
 –
половина диапазона разнесения частот
данного частотного канала, Гц.
Ориентировочно можно принять
–
половина диапазона разнесения частот
данного частотного канала, Гц.
Ориентировочно можно принять ![]() =
45 Гц. Тогда, например, при выборе fнес=630
Гц, сигнал «1» будет предаваться на
частоте f1=630+45=675
Гц, а сигнал «0» на частоте f2=630–45=585
Гц.
=
45 Гц. Тогда, например, при выборе fнес=630
Гц, сигнал «1» будет предаваться на
частоте f1=630+45=675
Гц, а сигнал «0» на частоте f2=630–45=585
Гц.
3.4.2. Структурная схема канала связи и электрические сигналы
Канал связи включает технические средства, обеспечивающие передачу сигнала от некоторою пункта А к пункту В. На рис. 3.3 приведена структурная схема связи источника сообщения и получатели сообщения.
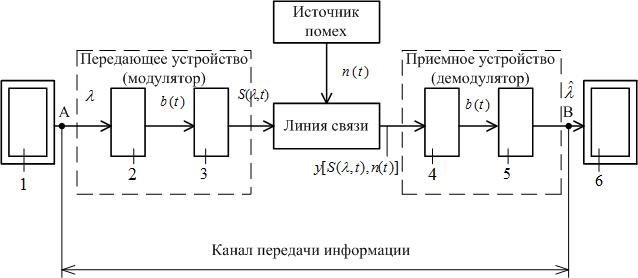
Рис. 3.3. Структурная схема системы связи: 1 – источник сообщения; 2 – преобразователь сообщения в сигнал; 3 – передатчик; 4 – приемник; 5 – преобразователь сигнала в сообщения; 6 – получатель сообщение.
Преобразователь в предающем устройстве
преобразует сообщение
 ,
которое имеет различную природу: в
канале обратной связи – уровень
напряжения ниже минимально допустимого
или выше номинального значения; в канале
прямой связи с объектами – вид
регулирования на повышение или понижение
напряжения в первичный электрический
сигнал b(t).
В передатчике этот сигнал превращается
во вторичный сигнал
,
которое имеет различную природу: в
канале обратной связи – уровень
напряжения ниже минимально допустимого
или выше номинального значения; в канале
прямой связи с объектами – вид
регулирования на повышение или понижение
напряжения в первичный электрический
сигнал b(t).
В передатчике этот сигнал превращается
во вторичный сигнал
 ,
являющийся функцией не только времена
t,
но и вида сообщения. В результате
модулированные сигнал приводятся к
виду, пригодному для передачи по
используемой линии связи. Преобразование
сообщения в сигнал должно быть обратимым,
чтобы не потерять переданную информацию
даже при отсутствии помех.
,
являющийся функцией не только времена
t,
но и вида сообщения. В результате
модулированные сигнал приводятся к
виду, пригодному для передачи по
используемой линии связи. Преобразование
сообщения в сигнал должно быть обратимым,
чтобы не потерять переданную информацию
даже при отсутствии помех.
Линия связи – это среда, по которой
распространяются сигналы. Для радиоканала
это среда распространения радиоволн,
для электрических каналов – симметричный
или коаксиальный кабель, для опто-электронных
систем – волоконно–оптический кабель.
При передаче сигнала по линии связи он
может искажаться из-за помех
 .
В результате на выходе линии связи
сигнал описывается функцией
.
В результате на выходе линии связи
сигнал описывается функцией
 λ
λ ,
,
 .
.
Приемное устройство обрабатывает этот
сигнал, формируя в начале копию первичного
сигналя
 на выходе приемника, а затеем копию
на выходе приемника, а затеем копию
 переданного
сообщения. Приемник на основе анализа
,
переданного
сообщения. Приемник на основе анализа
,
 должен определить какой из возможных
сообщений предавалось.
должен определить какой из возможных
сообщений предавалось.
В данном проекте количество одновременно предаваемых сообщений зависит от числа тяговых подстанций (ТУ – КП) и от числа точек измерения уровня напряжения на межподстанционных зонах заданного участка железнодорожной линии. Их количество более единицы. Поэтому для каждого сообщения, передаваемого одновременно с другими сообщениями, требуется отдельный частотный канал, отличающийся своей несущей частотой .
На рис. 3.4 приведена структурная схема многоканальной связи.
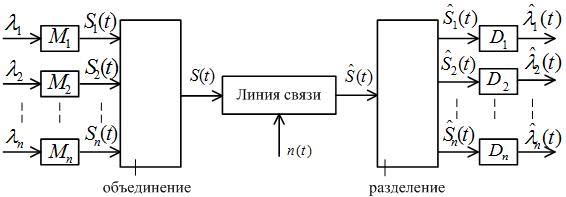
Рис. 3.4. Структурная
схема многоканальной связи:
 модуляторы;
модуляторы;
 демодуляторы
демодуляторы
Сообщения от нескольких источников
 преобразуются модуляторами в электрические
сигналы
преобразуются модуляторами в электрические
сигналы
 которые в устройстве уплотнения
(объединения) преобразуются в групповой
сигнал
которые в устройстве уплотнения
(объединения) преобразуются в групповой
сигнал
 предаваемый по общей линии связи. Далее
искаженный сигнал
предаваемый по общей линии связи. Далее
искаженный сигнал
 из которого выделяются с помощью фильтров
копии индивидуальных сигналов
из которого выделяются с помощью фильтров
копии индивидуальных сигналов
 преобразуемых канальными демодуляторами
в копии соответствующих сообщений
преобразуемых канальными демодуляторами
в копии соответствующих сообщений

Для организации многоканальной системы используются принципы частотного и временного разделения каналов. В данном проекте рекомендуется принимать частотное разделение каналов.
3.4.3. Включение дискретного устройства телерегулирования напряжения в многоканальную систему связи
На рис. 3.5 в качестве примера показана схема многоканальный симплексной связи системы телерегулирования напряжения для участка линии, включающей три межподстанционные зоны с четырьмя тяговыми подстанциями ТП1,…..,ТП4, на каждой из которых имеются по два объекта управления ОУ1, ОУ2 (управляемые выпрямители), тремя постами секционирования, на каждом из которых установлен датчик напряжения ДН1,……, ДН3.
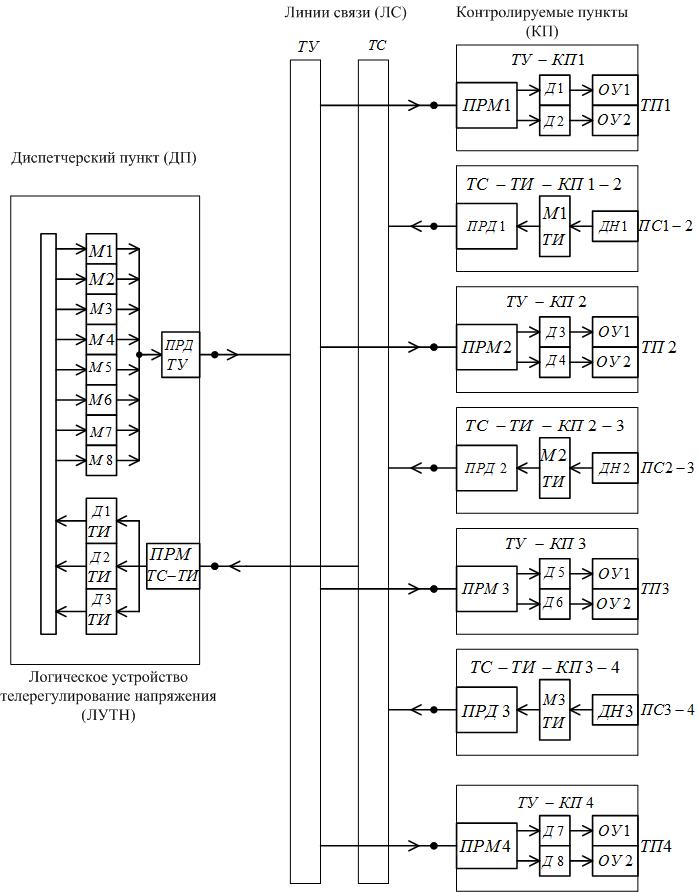
Рис. 3.5. Структурная схема многоканальной связи с частотным разделением каналов в системе телерегулирования напряжения в электротяговой сети (М1,….,М8 – модуляторы прямых каналов связи (ТУ); Д1,……,Д8 – демодуляторы прямых каналов связи (ТУ); М1 ТИ……М3ТИ – модуляторы обратных каналов связи (ТИ); Д1 ТИ…… Д3 ТИ – демодуляторы обратных каналов связи (ТИ); ПРД ТУ – частотный передатчик ТУ; ДН1,…,ДН3 – датчики напряжения постов секционирования; ОУ1, ОУ2 – объекты управления (управляемые выпрямители) тяговых подстанций; ПРД1,…,ПРД3 – частотных передатчики ТИ; ПРМ1,….,ПРМ4 – частотные приемники ТУ; ПРМ – ТС-ТИ частотный приемник ТИ
Контролируемые пункты ТУ – КП1…….ТУ –
КП4 и


 посредством частотных каналов связи
объединены в систему телерегулирования
напряжения с управляющим устройством
на диспетчерском пункте ДП. В
телемеханическое устройство
посредством частотных каналов связи
объединены в систему телерегулирования
напряжения с управляющим устройством
на диспетчерском пункте ДП. В
телемеханическое устройство
 включено логическое устройство
телерегулирования напряжения (ЛУТН).
включено логическое устройство
телерегулирования напряжения (ЛУТН).
На вход ЛУТН по каналам обратной связи с межподстанционных зон поступают сообщения об уровне напряжения. В ЛУТН осуществятся логическая обработка поступившей информации и преобразование ее для формирования управляющих воздействий, передаваемых по каналам прямой связи на объекты управления тяговых подстанций.
Таким образом, с помощью многоканальной системы связи достигается объединение устройств управления и объектов управления в сложную систему телерегулирования напряжения для участка электрифицированной линия, обеспечение электроэнергией которого осуществляется от четырех тяговых подстанций.