

7. Теоретические основы автоматического управления процессом бурения.
П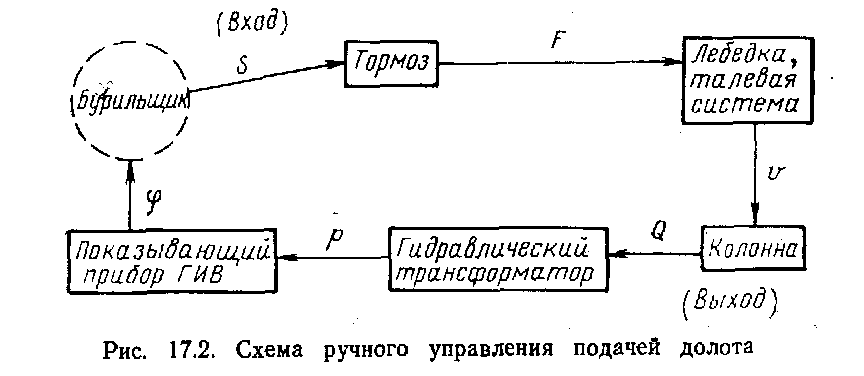 роцесс
бурения скважин характеризуется
независимыми и зависимыми параметрами.
К независимым относятся: осевая нагрузка
на долото, расход промывочной жидкости,
частота его вращения. От этих параметров
зависят вращающий момент и скорость
проходки это зависимые параметры.
Задача автоматизации процесса бурения
заключается в автоматическом изменении
независимых параметров. При этом режим
бурения должен обеспечивать
максимальную скорость проходки, это
получается рациональным сочетанием
нагрузки на долото, его частоты
вращения и расхода промывочной жидкости.
роцесс
бурения скважин характеризуется
независимыми и зависимыми параметрами.
К независимым относятся: осевая нагрузка
на долото, расход промывочной жидкости,
частота его вращения. От этих параметров
зависят вращающий момент и скорость
проходки это зависимые параметры.
Задача автоматизации процесса бурения
заключается в автоматическом изменении
независимых параметров. При этом режим
бурения должен обеспечивать
максимальную скорость проходки, это
получается рациональным сочетанием
нагрузки на долото, его частоты
вращения и расхода промывочной жидкости.
При ручном управлении нагрузка на долото регулируется изменением подачи бурильного инструмента с помощью тормозного устройства лебедки.
Б
 урильщик,
наблюдая за показаниями прибора при
отклонении нагрузки на долото, перемещает
на расстояние
S рукоятку
тормоза лебедки для того чтобы привести
ее к заданному значению. В этом случае
изменяется усилие F,
а также изменяется подача инструмента
и осевая нагрузка на долото. С уменьшением
тормозного усилия увеличивается подача
и осевая нагрузка на долото и наоборот.
Т.о., роль бурильщика сводится к перемещению
рукоятки управления тормозом лебедки.
Если вместо бурильщика в схему
включить
исполнительный механизм (привод),
управление можно осуществить
автоматически. Привод управляется
первичным преобразователем и
воздействует на тормоз буровой лебедки.
Схема будет
иметь вид: Обратная связь в замкнутой
системе осуществляется первичным
преобразователем.
урильщик,
наблюдая за показаниями прибора при
отклонении нагрузки на долото, перемещает
на расстояние
S рукоятку
тормоза лебедки для того чтобы привести
ее к заданному значению. В этом случае
изменяется усилие F,
а также изменяется подача инструмента
и осевая нагрузка на долото. С уменьшением
тормозного усилия увеличивается подача
и осевая нагрузка на долото и наоборот.
Т.о., роль бурильщика сводится к перемещению
рукоятки управления тормозом лебедки.
Если вместо бурильщика в схему
включить
исполнительный механизм (привод),
управление можно осуществить
автоматически. Привод управляется
первичным преобразователем и
воздействует на тормоз буровой лебедки.
Схема будет
иметь вид: Обратная связь в замкнутой
системе осуществляется первичным
преобразователем.
Для управления приводом входной величиной служит сигнал, который соответствует нагрузке на долото. В большинстве случаев мощность сигнала первичного преобразователя может быть недостаточным для управления приводом, поэтому в схему вводят промежуточное звено-усилитель. Так же в схеме предусмотрены блок сравнения и задатчик. С помощью задатчика устанавливают значение нагрузки на долото, которая автоматически поддерживаться регулятором подачи. Блок сравнения осуществляет выработку управляющего сигнала, который пропорционален разнице между существующей и заданной нагрузками на долото. Преимущества: более плавная подача долота, увеличивается скорость проходки, уменьшается износ долота.
2. Локальные системы контроля, регулирования и управления (лскр и у)
Локальные системы контроля, регулирования и управления эффективны при автоматизации технологически независимых объектов с компактным расположением оборудования и несложными целями управления (стабилизация, программное управление)
ЛПР - лицо, принимающее решение, оператор.
УСО - устройство связи с оператором (состоит из измерительных, сигнализирующих и регистрирующих приборов).
Локальные регуляторы могут быть: аналоговыми, цифровыми, одно или многоканальными. Наличие человека-оператора (ЛПР) в системе позволяет использовать эту структуру на объектах с невысоким уровнем механизации и надежностью технолог оборудования, осуществляет общий контроль за ходом ТП и ручного управления (РУ).
Структура ЛСКРиУ содержит
- датчики измеряемых переменных (Д) на выходе ТОУ;
- автоматические регуляторы;
- ИУ, передающие команды управления (в том числе и от ЛПР в режиме ручного управления) на регулирующие органы ТОУ.