Акустические уровнемеры
В акустических уровнемерах уровень определяется по времени прохождения ультразвуковых волн от излучателя до уровня жидкости. В акустических уровнемерах обычно используется принцип отражения звуковых волн от границы раздела жидкость—газ (воздух).
Блок-схема ультразвукового уровнемера показана на рисунке. В комплект прибора входят пьезоэлектрические излучатели 3, электронный блок 1 и вторичный прибор 11.
Электронный блок состоит из генератора 1, задающего частоту повторения импульсов, генератора 2 импульсов, посылаемых в измеряемую среду, приемного усилителя 4, измерителя времени 5. Генератор 1 управляет работой генератора 2 и схемой измерения времени. Генератор 2 формирует короткие импульсы для возбуждения пьезоэлектрического излучателя 3. Электрический импульс, преобразованный с помощью пьезоэлектрического излучателя в ультразвуковой, распространяется в жидкой среде, отражается от границы раздела жидкость—воздух и возвращается обратно, воздействуя на приемный излучатель, где снова преобразуется в электрический импульс.
Рис. 10.7. Блок-схема
ультразвукового уровнемера
1. Состав асу тп. Основные компоненты
АСУ ТП предназначена для выработки и реализации управляющего воздействия на ТОУ и представляют собой человеко-машинную систему, обеспечивающую автоматизированный сбор и обработку информации, необходимой для оптимизации управления объектом в соответствии с принятым критерием.
Основные компоненты:
КТС – комплекс технических средств;
СПО – системное программное обеспечение;
ФАУ – функциональные алгоритмы управления.
В свою очередь КТС и СПО образуют программно-технический комплекс (ПТК).
ПТК и ФАУ образуют АСУТП.
ТОУ – совокупность технологического оборудования и реализованного на нем по соответствующим инструкциям и регламентам технологического процесса производства.
Совместно функционирующего ТОУ + управляющая им АСУТП образуют АТК (автоматизированный технологический комплекс).
АСУТП состоит из следующих обеспечивающих систем:
1 .
Техническое обеспечение
(вычислительные и управляющие устройства,
средства получения информации, т.е.
датчики, средства преобразования,
хранения, отображения и регистрации
информации, устройства передачи сигналов
и ИУ);
.
Техническое обеспечение
(вычислительные и управляющие устройства,
средства получения информации, т.е.
датчики, средства преобразования,
хранения, отображения и регистрации
информации, устройства передачи сигналов
и ИУ);
2. Программное обеспечение (совокупность программ, необходимых для реализации функций АСУТП и обеспечения заданного функционирования КТС);
3. Информационное обеспечение (информация, характеризующая состояние системы управления, системы классификации и кодирования технологической и технико-экономической информации, массивы данных и документы, необходимых для выполнения АСУ ТП);
4. Организационное обеспечение (совокупность описаний функциональных, технических и организационных структур, инструкции для оперативного персонала);
5. Оперативный персонал (технологи-операторы, осуществляющие контроль за управлением системы);
6. Эксплуатационный персонал (персонал, обеспечивающий эксплуатацию системы)
Разработка ПО проводится на основе математического обеспечения, которое в состав АСУ ТП не входит. При функционировании АСУ ТП происходит целенаправленное преобразование информации в выходную, выполняемое совместно 2-мя компонентами: техническим обеспечением и оперативным персоналом. Они собирают входную информацию от объекта, обрабатывают и анализируют ее, а затем принимают решения по управлению и реализуют их, формируя управляющее воздействие на объект, поэтому оперативный персонал и техническое обеспечение - главные компоненты АСУ ТП. Для их правильного функционирования они обеспечиваются правилами и инструкциями. Для операторов - это документы организационного обеспечения, а для ТО - программы и алгоритмы работ. Под ТО АСУ ТП понимают комплекс технических средств (КТС), предназначены для функционирования АСУ ТП.
Локальные системы контроля, регулирования и управления (ЛСКР и У)
Локальные системы контроля, регулирования и управления эффективны при автоматизации технологически независимых объектов с компактным расположением оборудования и несложными целями управления (стабилизация, программное управление)
ЛПР - лицо, принимающее решение, оператор.
УСО - устройство связи с оператором (состоит из измерительных, сигнализирующих и регистрирующих приборов).
Локальные регуляторы могут быть: аналоговыми, цифровыми, одно или многоканальными. Наличие человека-оператора (ЛПР) в системе позволяет использовать эту структуру на объектах с невысоким уровнем механизации и надежностью технолог оборудования, осуществляет общий контроль за ходом ТП и ручного управления (РУ).
Структура ЛСКРиУ содержит
- датчики измеряемых переменных (Д) на выходе ТОУ;
- автоматические регуляторы;
- ИУ, передающие команды управления (в том числе и от ЛПР в режиме ручного управления) на регулирующие органы ТОУ.

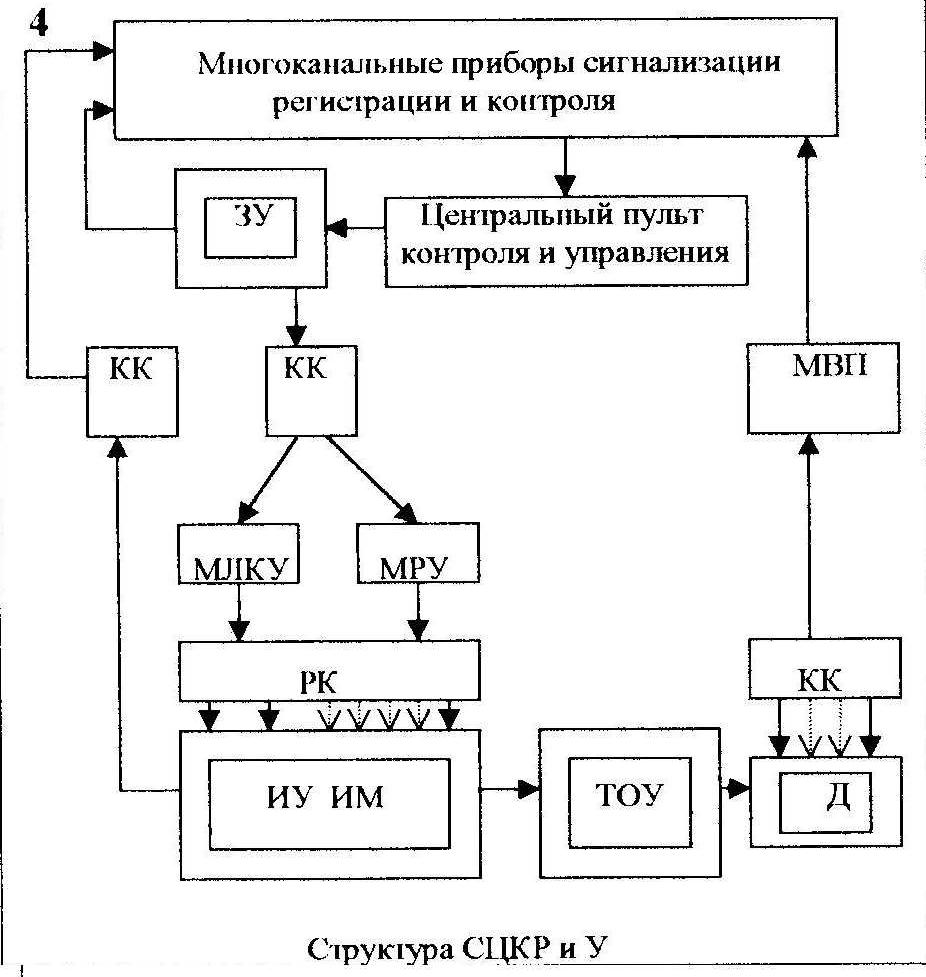
Централизованные системы контроля, регулирования и управления (ЦСКР и У)
Появление таких СУ связано с увеличением числа контролируемых и регулируемых параметров с территориальной рассредоточенностью ТОУ. Для ЦСКРиУ характерны дистанционный контроль, регулирование и управление, что позволило территориально отделить наблюдение и управление за ТП от ТОУ.
Автоматические и автоматизированные ЦСКРиУ предназначены для сбора и обработки данных об объекте управления и выработки на основе их анализа в соответствии с целями системы управляющих воздействий. Первоначально в данной системе на центральном пульте управления применялись одноточечные измерительные и регистрирующие приборы и одноканальные регуляторы. В дальнейшем для сокращения числа необходимого оборудования и линий связи стали применять многоканальные средства контроля и регулирования.
В многоканальных системах некоторые функциональные устройства являются общими для всех каналов системы и с помощью коммутаторов и распределительных каналов (КК и РК) подключенных к индивидуальным устройствам канала, образуя замкнутый контур управления. В СУ ТП используется многоканальный вторичный преобразователь (МВП), автоматические контрольно-измерительные и регистрирующие приборы (МКИП), многоканальные регулирующие устройства (МРУ), многоканальные устройства логико-командного управления (МЛКУ), задающее устройство (ЗУ).
Функции ЛПР: оценка функционирования ЦСКРиУ и формирование оптимального управления путем изменения уставок в ЗУ.