

3.2.1. Направления скоростей и ускорений точек звеньев механизма
В общем случае
криволинейного движения вектор скорости
![]() точки А
(рис 3.1, а),
как и вектор тангенциальной составляющей
точки А
(рис 3.1, а),
как и вектор тангенциальной составляющей
![]() полного ускорения, направлены по
касательной к траектории движения, а
вектор нормальной составляющей
полного ускорения, направлены по
касательной к траектории движения, а
вектор нормальной составляющей
![]() полного ускорения – вдоль нормали
(отсюда название составляющей) к
касательной по направлению к центру
кривизны траектории О.
В частном случае, когда траекторией
является окружность, (рис. 3.1, б),
то векторы
и
перпендикулярны радиусу ОА,
а вектор
полного ускорения – вдоль нормали
(отсюда название составляющей) к
касательной по направлению к центру
кривизны траектории О.
В частном случае, когда траекторией
является окружность, (рис. 3.1, б),
то векторы
и
перпендикулярны радиусу ОА,
а вектор
![]() направлен
параллельно ОА
от точки А
к центру окружности
О.
В том
случае, если ОА
– звено механизма и известны его угловая
скорость ωОА
и угловое ускорение εОА,
то:
направлен
параллельно ОА
от точки А
к центру окружности
О.
В том
случае, если ОА
– звено механизма и известны его угловая
скорость ωОА
и угловое ускорение εОА,
то:
|
(3.6) |
Вектор
![]() направлен в сторону вращения, т.е.
совпадает с направлением угловой
скорости ωОА.
Направление вектора
совпадает с направлением углового
ускорения εОА.
направлен в сторону вращения, т.е.
совпадает с направлением угловой
скорости ωОА.
Направление вектора
совпадает с направлением углового
ускорения εОА.
В случае
поступательного прямолинейного движения
радиус кривизны траектории ОА
равен
бесконечности, следовательно
![]() =
0, и полное ускорение точки А
будет равно тангенциальной составляющей.
=
0, и полное ускорение точки А
будет равно тангенциальной составляющей.
|
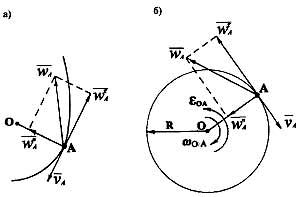
Рис. 3.1. Направления скорости
и ускорения криволинейного движения
Если для любого звена построены план скоростей и план ускорений, то можно определить направления и величины угловой скорости и углового ускорения. Пусть для звена АВ (рис. 3.2, а) построены план скоростей (рис. 3.2, б) и план ускорений (рис. 3.2, в) точек А и В.
|
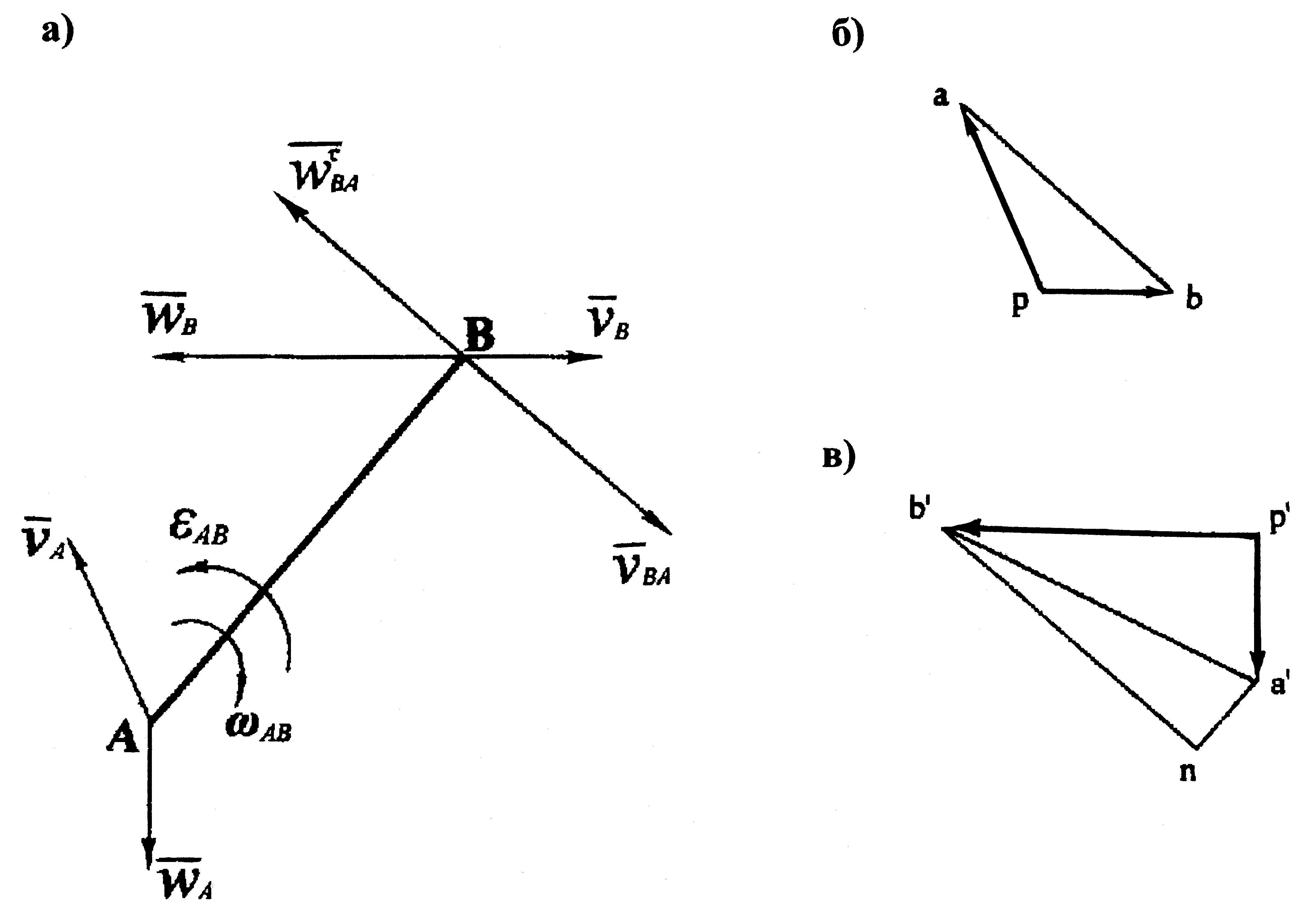
Рис. 3.2. Определение угловой скорости
и углового ускорения звена АВ
Перенесем в точку
В
звена вектор
![]() относительной скорости точки В,
снятый с плана скоростей (
относительной скорости точки В,
снятый с плана скоростей (![]() = kv
* аb)
и вектор тангенциальной составляющей
полного ускорения, снятый с плана
ускорений (
= kv
* аb)
и вектор тангенциальной составляющей
полного ускорения, снятый с плана
ускорений (![]() = kw
nb').
Направления векторов
и
= kw
nb').
Направления векторов
и
![]() определят
соответственно направления угловой
скорости ωАВ
и углового ускорения
εАB.
определят
соответственно направления угловой
скорости ωАВ
и углового ускорения
εАB.
ωАВ
=
|
(3.7) |
 ;
εАB
=
;
εАB
=
 .
.
3.2.2. Определение скоростей и ускорений точек звеньев методом подобия
Если известны скорости и ускорения двух точек звена, то, применяя метод подобия, можно определить скорость и ускорение любой точки этого звена. Поясним на примере скоростей точек.
Например, чтобы
определить модуль и направление вектора
скорости
![]() точки С
звена АВ,
если известны параметры векторов
скоростей точек А
и В
(рис. 3.3, а),
достаточно на отрезке аb
плана скоростей найти точку с,
которая делит аb
в том же отношении, что и точка С
делит звено АВ.
Для этого отрезок АВ
перенесем на план скоростей, совмещая
точку А
с точкой а,
затем соединим точку В
с точкой b
и проведем через точку С
прямую, параллельную Вb
до пересечения с аb
в искомой точке с.
Тогда отрезок рс
будет
изображать вектор абсолютной скорости
точки С.
точки С
звена АВ,
если известны параметры векторов
скоростей точек А
и В
(рис. 3.3, а),
достаточно на отрезке аb
плана скоростей найти точку с,
которая делит аb
в том же отношении, что и точка С
делит звено АВ.
Для этого отрезок АВ
перенесем на план скоростей, совмещая
точку А
с точкой а,
затем соединим точку В
с точкой b
и проведем через точку С
прямую, параллельную Вb
до пересечения с аb
в искомой точке с.
Тогда отрезок рс
будет
изображать вектор абсолютной скорости
точки С.
На рис. 3.3, б, в приведены варианты расположения искомой точки С на звене АВ.
|
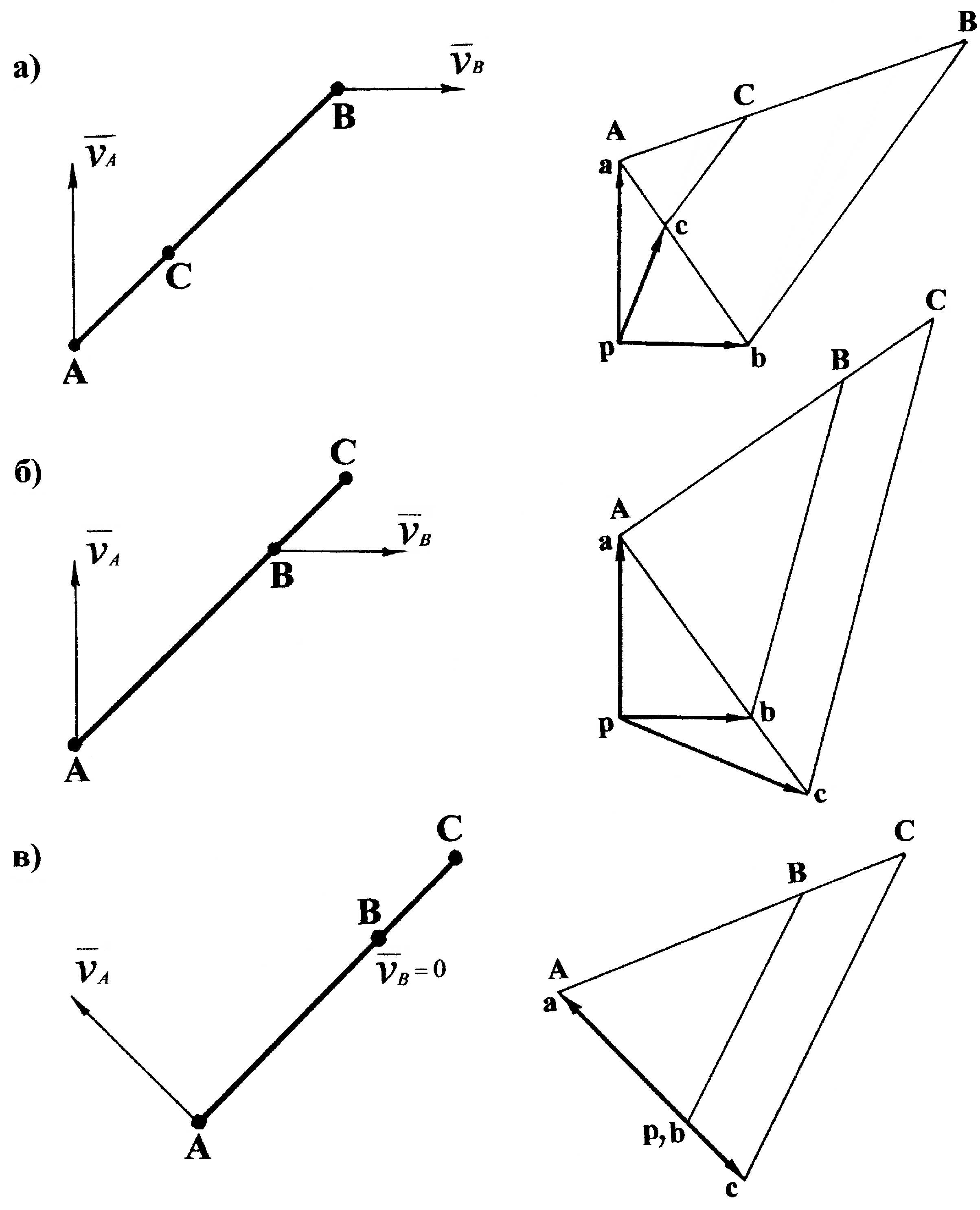
Рис. 3.3. Графическое определение скоростей точек звена,
лежащих на одной прямой
Если точка С не лежит на прямой АВ или на ее продолжении, то на отрезке аb плана скоростей необходимо построить треугольник аbс, подобный треугольнику АВС звена, причем треугольник аbс нельзя переворачивать в плоскости чертежа, т.е. последовательность обхода вершин треугольников аbс и АВС в одном направлении (или по часовой стрелке или против часовой стрелки) должна быть одинакова. Полученный в результате построений отрезок рс (рис. 3.4) выражает скорость точки С.
|
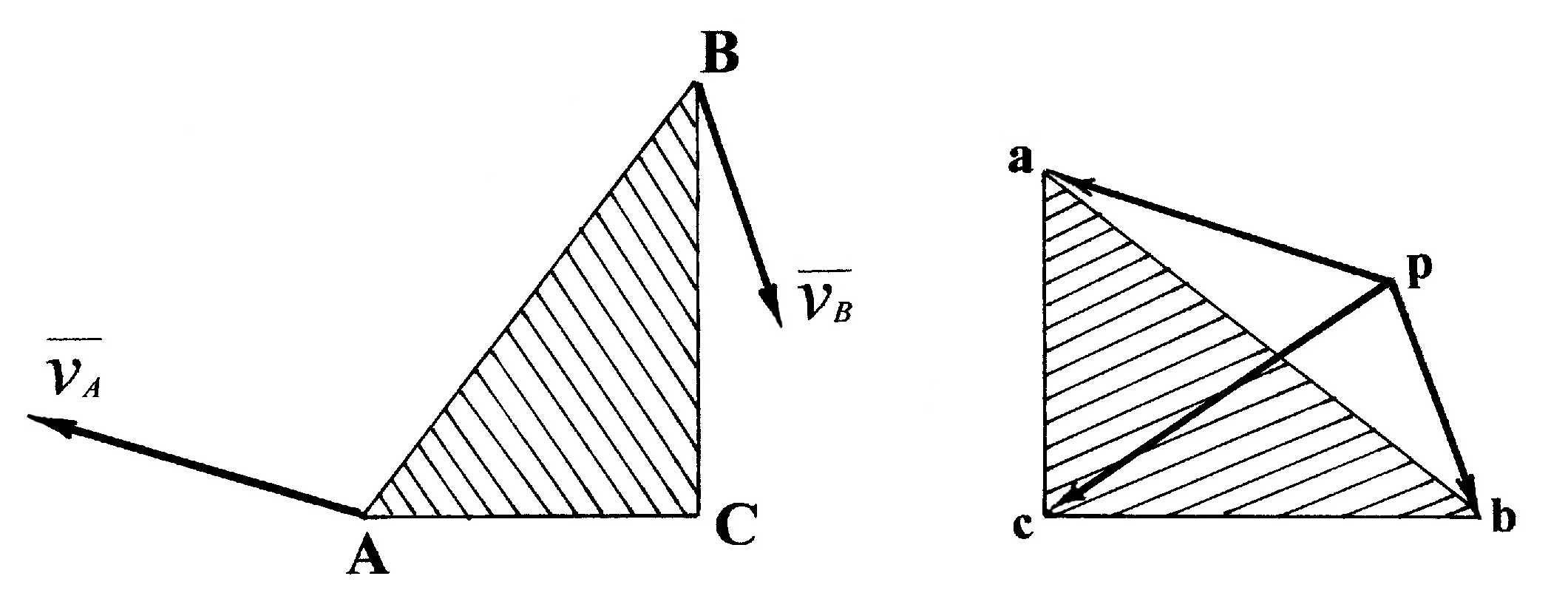
Рис. 3.4. Графическое определение скоростей точек звена,
не лежащих на одной прямой
Методом подобия можно определять и ускорения точек звеньев механизмов при условии, что все вышеприведенные построения необходимо выполнять, разумеется, на плане ускорений звена.
Для определения
нормальной составляющей полного
ускорения
![]() и кориолисова
(поворотного) ускорения
и кориолисова
(поворотного) ускорения
![]() точек звеньев целесообразно использовать
графические методы, как более наглядные
и практически безошибочные. Для этого,
кроме схемы механизма необходимо иметь
построенный план скоростей.
точек звеньев целесообразно использовать
графические методы, как более наглядные
и практически безошибочные. Для этого,
кроме схемы механизма необходимо иметь
построенный план скоростей.
Суть метода заключается в следующем: преобразовав известные из теоретической механики аналитические зависимости
|
(3.8) |

в пропорции
|
(3.9) |
 и
и
 ,
,
где R – радиус кривизны траектории переносного движения;
![]()
![]() – скорость
относительного движения;
– скорость
относительного движения;
![]() – скорость
переносного движения.
– скорость
переносного движения.
Построив подобные треугольники на сторонах двух лучей, выходящих из одной точки (рис. 3.5), по трем известным величинам (сторонам треугольников) находим неизвестные четвертые – соответственно нормальное (рис. 3.5, а) и кориолисово (рис. 3.5, б) ускорения.
|
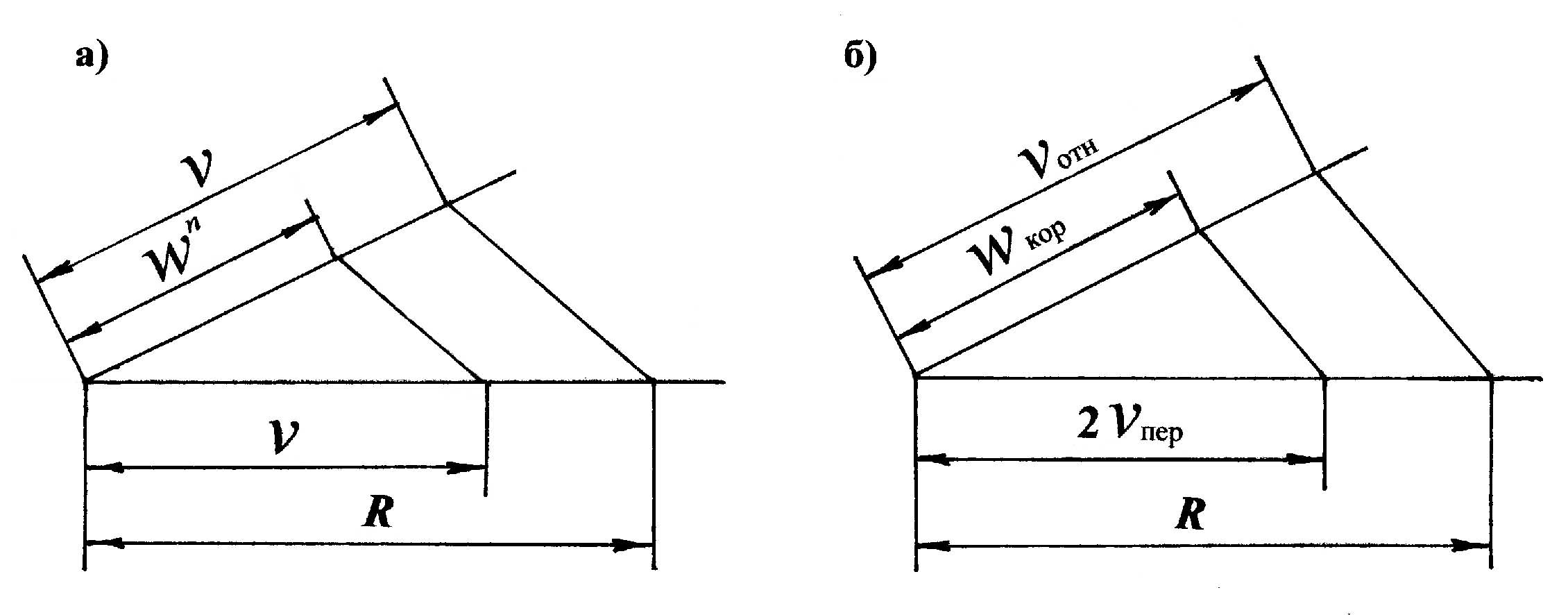
Рис. 3.5. Графический метод определения нормального
и кориолисова ускорений
Для конкретных механизмов или структурных групп все необходимые величины снимаются непосредственно с чертежа, причем не требуется выполнение дополнительных расчетов, что упрощает решение пропорций (3.9). Полученные отрезки, выражающие нормальное (3.10) и кориолисово (3.11) ускорения, сразу переносятся на план ускорений без каких-либо пересчетов.
а'n
=
|
(3.10) |
 ;
;
p'к
=
|
(3.11) |
 .
.Пример. Пусть требуется построить план ускорений структурной группы 3 вида, состоящей из звеньев 1 и 2, соединенных внутренней поступательной парой в точке В1 и имеющей две внешние вращательные пары в точках А и В2 (рис. 3.6, а). Скорость и ускорение точки А (звено 1) известны, скорость и ускорение точки В2 равны нулю (звено 2 связано вращательной парой со стойкой 0 и поэтому не имеет линейных перемещений). План скоростей группы приведен на рис. 3.6, б. Требуется графическим способом определить ускорение точки В1 звена 1 (рис. 3.6, е). Из курса теоретической механики [4, 5] известно, что ускорение точки В1 складывается из ускорения относительного (поступательного) движения точки А, ускорения переносного движения точки В относительно точки А и кориолисова ускорения (подробнее см. в [9]).
|
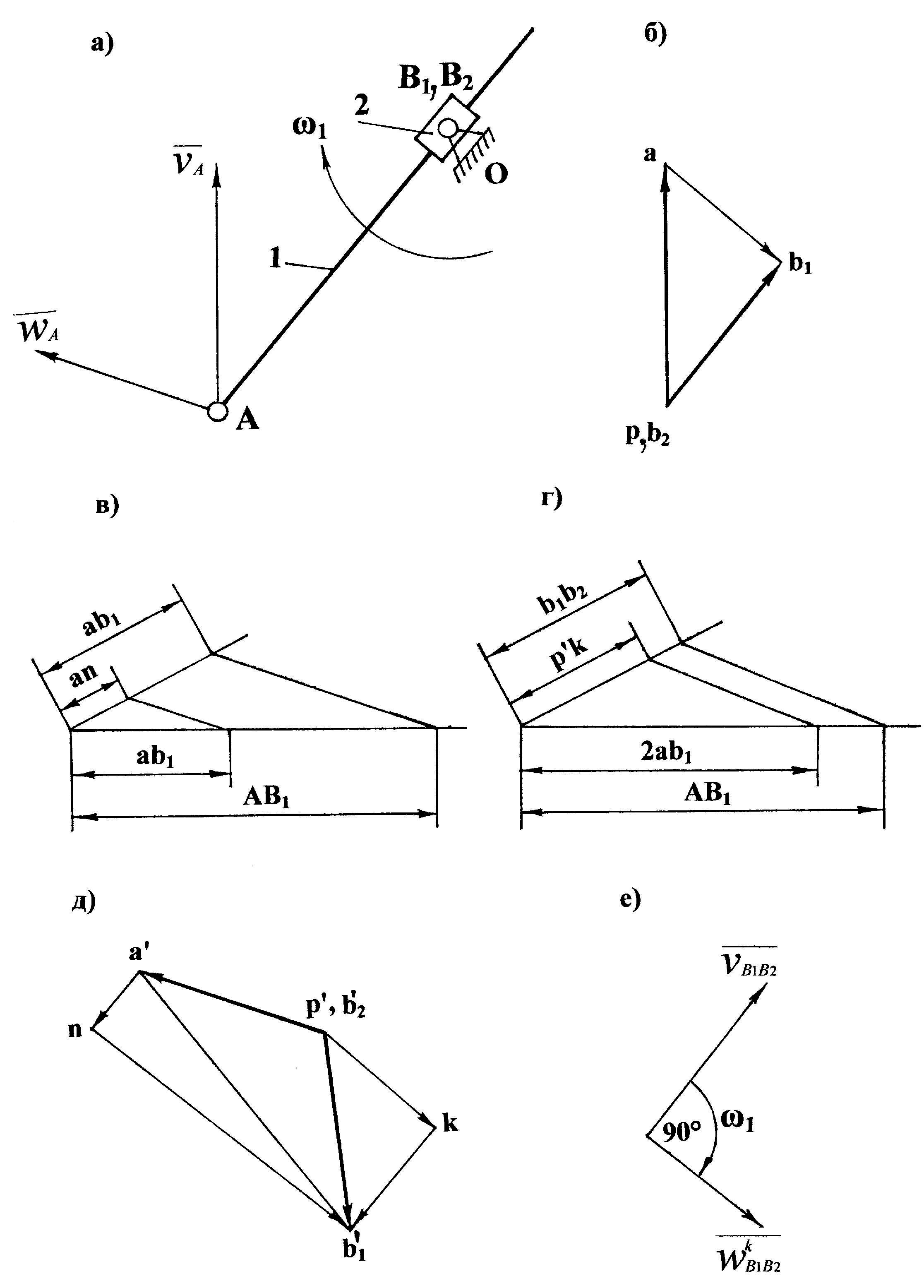
Рис. 3.6. Планы скоростей и ускорений структурной группы 3-го вида
На рис. 3.6, в представлена методика определения отрезка, выражающего нормальное ускорение точки В1 (точки В1 и В2 совпадают, но принадлежат разным звеньям). На двух лучах, выходящих из одной точки, построены отрезки в пропорции:
|
(3.12) |
На нижнем луче откладываются: отрезок АВ1 с плана положения группы и отрезок аb1 с плана скоростей. На верхнем луче откладывается отрезок аb1.
Соединив В1 и b1, проведем линию b1n, параллельную В1b1 до пересечения с верхним лучом в точке n. Отрезок а'n и есть искомый, изображающий в соответствующем масштабе ускорений вектор нормальной составляющей ускорения точки В1.
На
рис. 3.6, г
представлено аналогичное построение
отрезка p'k,
выражающего кориолисово ускорение
![]() .
.
На двух лучах, выходящих из одной точки, построены отрезки в пропорции:
|
(3.13) |
Отрезки
аb1
и b1b2
снимаются с плана скоростей, отрезок
АВ1
– с плана положения группы. На плане
ускорений p'к
![]() кb'1,
а а'n
кв'1.
Подробная методика и векторные уравнения,
необходимые для построения планов
скоростей и ускорений разных структурных
групп приведены в [9]. Для определения
направления вектора кориолисова
ускорения необходимо вектор относительной
скорости
кb'1,
а а'n
кв'1.
Подробная методика и векторные уравнения,
необходимые для построения планов
скоростей и ускорений разных структурных
групп приведены в [9]. Для определения
направления вектора кориолисова
ускорения необходимо вектор относительной
скорости
![]() повернуть на 90º в сторону переносного
движения, т.е. по направлению угловой
скорости звена 1 (рис. 3.6, д).
повернуть на 90º в сторону переносного
движения, т.е. по направлению угловой
скорости звена 1 (рис. 3.6, д).
Более подробно метод планов изложен в [1], [3].
Пример построения планов скоростей и ускорений механизма в заданном положении см. в Приложении.