

Анализ звеньев механизма
Номера звеньев п/п |
В какие пары входит звено |
Абсолютное движение звена (относительно стойки) |
0 |
|
|
1 |
|
|
2 |
|
|
0
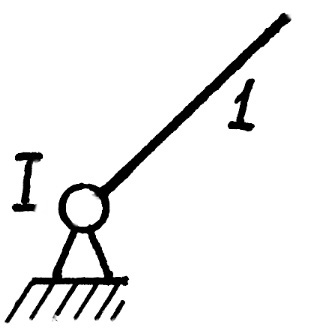
Рис. 2.5. Кривошип 1, образующий пару Ι со стойкой 0 и совершающий вращательное движение |
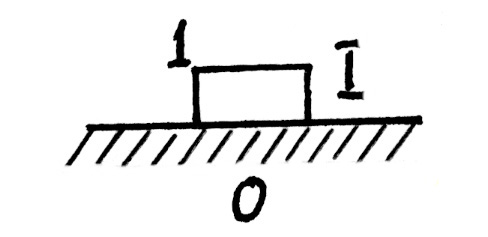
Рис. 2.6. Ползун 1, образующий пару Ι со стойкой 0 и совершающий поступательное движение |
2.4. Определить число степеней подвижности механизма W по структурной формуле Чебышева:
W = 3(n – 1) – 2Р2 – Р1, |
(2.1) |
где n – число звеньев механизма (включая стойку);
Р2 – число пар ΙΙ класс;
Р1 – число пар Ι класса.
2.5. Разделить механизм на структурные группы Ассура и первичный механизм (табл. 2.3).
Таблица 2.3
Структурные группы Ассура
№ группы в порядке ее отделения от механизма |
Звенья, образующие группу |
Внешние пары |
Внутренние пары |
Вид группы |
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
... |
|
|
|
|
И т.д. |
|
|
|
|
По методике Ассура любой механизм (плоский или пространственный) можно разделить на первичный механизм и на отдельные однотипные части (структурные группы), состоящие из определенного числа звеньев и кинематических пар, причем количественное соотношение звеньев и пар не произвольное, а строго определенное (подробно вопрос классификации механизмов будет рассмотрен на лекционных занятиях).
В данной курсовой работе для плоских механизмов, имеющих только низшие пары (вращательные и поступательные), соотношение между звеньями и парами определяется по зависимости
3n = 2Р, |
(2.2) |
где n – число звеньев, образующих структурную группу;
Р – число пар (внешних и внутренних), входящих в группу.
Как видно из зависимости 2.2, число звеньев в структурных группах может быть только четным: 2, 4, 6 и т.д. Наибольшее распространение при образовании механизмов получили группы с двумя звеньями и, соответственно, тремя кинематическими парами (вращательными и поступательными). Такие структурные группы называют двухповодковыми. Их число, в соответствии с теорией Ассура, равно 5, однако на практике чаще всего обычно применяют три вида двухповодковых групп (рис. 2.7–2.9).
|
|
|
Рис. 2.7. Структурная группа 1-го вида (ВВВ) |
Рис. 2.8. Структурная группа 2-го вида (ВВП) |
Рис. 2.9. Структурная группа 3-го вида (ВПВ) |



Двухповодковые группы образованы двумя звеньями (поводками) и тремя кинематическими парами, из которых одна пара – внутренняя, которой соединяются два звена группы, и две пары – внешние, которыми группа соединяется либо со стойкой, либо с соседними структурными группами.
В структурной группе 1-го вида (рис. 2.7) все три пары вращательные.
В структурной группе 2-го вида (рис. 2.8) внутренняя пара вращательная, одна внешняя пара – вращательная, вторая внешняя пара – поступательная.
В структурной группе 3-го вида (рис. 2.9) внутренняя пара – поступательная, обе внешние пары – вращательные.
Структурные группы следует отделять от заданного механизма таким образом, чтобы степень подвижности оставшейся части механизма не изменилась. После отделения всех групп должен остаться первичный механизм – начальное звено (кривошип ОА) со стойкой.
Все структурные группы с указанием пар и звеньев необходимо показать на отдельном листе пояснительной записки.
Пример выполнения структурного анализа см. в [7, 8].