

Дополнительные данные к заданию
Сумма двух последних цифр зачетной книжки |
Угол поворота начального звена (кривошипа ОА) α, град |
Число оборотов ведущего колеса nвщ, об./мин |
Число оборотов ведомого колеса nвд, об./мин |
0 1 2 3 4 |
15 30 45 60 75 |
350
|
220 230 240 250 260 |
5 6 7 8 9 |
105 120 135 150 165 |
400 |
270 280 290 300 310 |
10 11 12 13 14 |
195 210 225 240 255 |
450 |
320 330 340 350 360 |
15 16 17 18 |
285 300 315 330 |
500 |
370 380 390 400 |
2. Структурное исследование плоского механизма
Структурную схему заданного механизма (без соблюдения масштаба) следует начертить на отдельном листе пояснительной записки и выполнить полное структурное исследование в табличной форме в следующей последовательности:
2.1. Пронумеровать звенья (начиная с ведущего) арабскими цифрами (1, 2, 3…) и кинематические пары – римскими (Ι, ΙΙ, ΙΙΙ…). Стойка (неподвижное звено) обозначается 0. Нумерация звеньев и кинематических пар может производиться произвольно, однако рекомендуется соблюдать определенный порядок: начиная с ведущего звена и перемещаясь к звену механизма, наиболее удаленному от ведущего. Ведущее звено для всех вариантов – кривошип ОА.
2.2. Выполнить анализ кинематических пар (табл. 2.1). Для каждой пары необходимо определить: какими звеньями она образована; какие относительные движения звеньев, ее образующих, допускает; ее класс; высшая или низшая; наименование пары.
Таблица 2.1
Анализ кинематических пар механизма
Номера пар п/п |
Звенья, образующие пару |
Относительное движение звеньев, допускаемое парой |
Класс пары |
Высшая или низшая пара |
Наименование пары |
Ι |
|
|
|
|
|
ΙΙ |
|
|
|
|
|
ΙΙΙ |
|
|
|
|
|
… |
|
|
|
|
|
И т.д. |
|
|
|
|
|
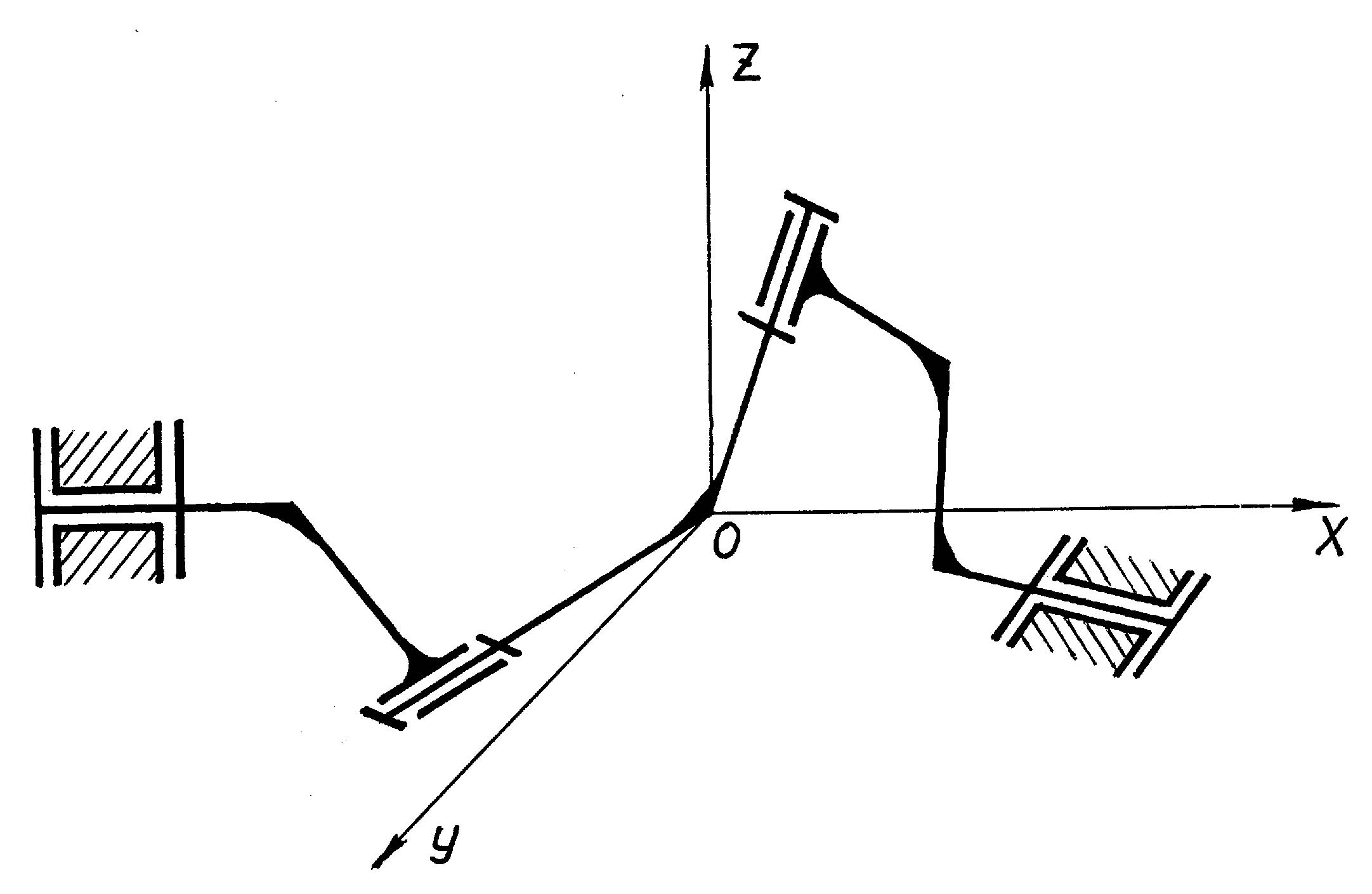
В отличие от пространственных (рис. 2.1) в плоских механизмах (рис. 2.2) все звенья движутся параллельно одной плоскости. В этом случае число независимых движений свободных звеньев (число степеней свободы) равно 3 (2 поступательных и одно вращательное). Кинематические пары в плоском механизме ограничивают относительные движения звеньев, не допуская либо одно движение, либо два движения из трех возможных.
|
|
|
Рис. 2.1. Структурная схема пространственного механизма. Шарнир Гука (кардан) |
Рис. 2.2. Структурная схема плоского шарнирного механизма |
|

То есть в плоских механизмах возможны пары только Ι или ΙΙ класса по плоской классификации.
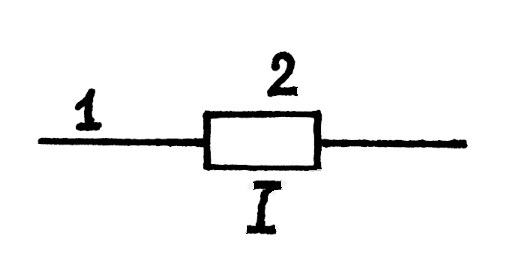
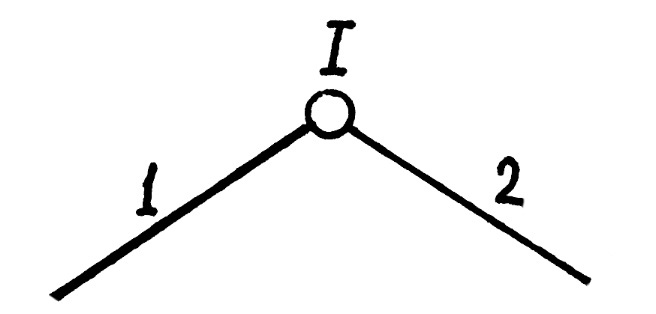
Плоские пары ΙΙ класса допускают только одно возможное движение (либо поступательное, либо вращательное), поэтому они имеют свое название – поступательная пара Ι (пример: ползун 2, движущийся по направляющей 1, рис. 2.3) или вращательная пара Ι (пример: шарнир, образованный звеньями 1 и 2, рис. 2.4).
Рис. 2.3. Плоская поступательная пара |
Рис. 2.4. Плоская вращательная пара |
Плоские пары Ι класса допускают одно поступательное и одно вращательное относительные движения звеньев (когда они движутся относительно друг друга поступательно и одновременно поворачиваются, пример: зубья зубчатых колес). Во всех вариантах курсовой работы пар Ι класса нет.
Кинематические пары по характеру соприкосновения звеньев делят на низшие и высшие. Низшими называются пары, звенья которых соприкасаются по поверхности (либо по плоскости, см. рис. 2.3, либо по криволинейной, а в большинстве случаев – по цилиндрической поверхности, см. рис. 2.4). Высшими называются пары, звенья которых соприкасаются либо по линии, либо в точке (в данной работе отсутствуют).
В таблице 2.1 характеристики кинематических пар следует записывать сокращенно:
ВП – вращательная пара;
ПП – поступательная пара;
ВД – вращательное относительное движение;
ПД – поступательное относительное движение;
Н – низшая пара;
В – высшая пара.
2.3. Выполнить анализ звеньев (табл. 2.2).
Для каждого звена необходимо указать номера пар, в которые звено входит, и характер абсолютного движения (т.е. движения относительно стойки) каждого звена (не движется, вращательное, поступательное, сложное). При определении вида абсолютного движения следует иметь в виду, что стойка не движется, а звенья, образующие пары со стойкой, совершают одно из простых движений, например, кривошип или кулиса (рис. 2.5) – вращательное движение, а ползун или поршень (рис. 2.6) – поступательное. Звенья, не образующие пару со стойкой, например, шатун, коромысло, направляющая кулисы и другие, совершают сложное движение – вращательное и поступательное одновременно.
Таблица 2.2