

7. Оценка устойчивости эгсп
Выполняется по приближенной линейной модели ненагруженного привода, структурная схема которой приведена на рис.2.
Рис.2. Структурная схема линейной модели
Механическая постоянная времени определяется по выражению

здесь Ец - приведенный модуль упругости гидроцилиндра. Рекомендуется принять Eц = (0,85 ... 0,95) Е , где Е - модуль упругости рабочей жидкости.
Коэффициент относительного демпфирования гидроцилиндра на стадии предварительного расчета следует задать
𝛏ц=0,1…0,3 (11)
Коэффициент относительного демпфирования 𝛏у и постоянная времени Ту ЭГУ оцениваются по его паспортным данным

где
 - частоты ( Гц) при сдвиге фаз соответственно
на -45° и 90°.
- частоты ( Гц) при сдвиге фаз соответственно
на -45° и 90°.
При получении передаточной функции для упрощения расчетов, необходимо понимать, что добротность ЭГСП - есть коэффициент усиления разомкнутой системы

Согласно структурной схеме (рис.2.) передаточная функция ЭГСП

Рис.2. структурна схема

Здесь
 (15)
(15)
Проверку устойчивости рекомендуется произвести по критерию Гурвица. Для системы 5-го порядка, имеющей передаточную функцию вида (14), требуется при положительных коэффициентах а1 … а5 выполнение неравенств

8. Коррекция эгсп
Производится в обязательном порядке при отрицательном результате оценки устойчивости.
Для устойчивого ЭГСП рекомендуется выполнить расчет на ЭВМ переходного процесса, дать анализ качества регулирования и при необходимости выполнить коррекцию.
Для ЭГСП применимы методы коррекции, используемые в проектировании гидромеханических следящих приводов [1...3]. Однако, при разработке ЭГСП из готовых модулей коррекцию наиболее проще осуществить с помощью электрических устройств. На стадии предварительного расчета следует установить тип корректирующего звена и место его постановки в электрической цепи.
3. Пример расчета
Условие. Выполнить предварительный расчет ЭГСП специального технологического оборудования для следующих исходных данных: максимальное усилие Rmax=6кH;
максимальная скорость слежения без нагрузки Vmax=0,075 м/с;
максимальная погрешность слежения Еmax= 0,5 мм;
ход Н = 250 мм; приведенная масса подвижных частей m=150 кг.
Строим схему ЭГСП (рис.3), используя в качестве ГД гидроцилиндр с двусторонним штоком, а электрическую ОС формируем посредством потенциометра.

Рис.3. Расчетная схема
Выбираем [4] рабочую жидкость - минеральное масло ИГП-30 У38 101413-78. Ориентируясь на технические данные гидроцилиндров по ОСТ2 Г25-1-86, принимаем номинальное рабочее давление Рном=2,5МПа.
Оцениваем эффективную площадь гидроцилиндра, м2

Задаемся соотношением и определяем диаметр поршня, м

выбираем (см.прилож. 1) серийно выпускаемый гидроцилиндр 411- 80мм, х 40 х 250 - 04 ОСТ2 Г25-1-86 с двусторонним штоком, имеющий D=80 мм, dшт= 40 мм, Н = 250 мм. Уточняем значение эффективной площади, м2

При выборе ЭГУ ориентируемся на технические данные дросселирующих гидрораспределителей типа УЭ85 и типа MOOG- 62 (см. прилож. 2 и 3), у которых паспортное значение расхода указывается при перепаде давлений ∆Рэгу=7МПа
Подсчитываем условное значение расхода для выбора ЭГУ согласно (3), л/мин

В качестве ЭГУ
используем дросселирующий гидрораспределитель
- УЭ85-32-20, имеющий при ∆Рэгу=7
МПа расход Qэгy
=32 л/мин, что удовлетворяет условию (3).
Устанавливаем параметры, необходимые
в дальнейших расчетах: номинальный ток
управления
=
200 мА, частота при сдвиге фаз на -45°
 =90
Гц; на -90°
=90
Гц; на -90°
 =
200 Гц.
=
200 Гц.
Производим оценку коэффициента усиления по расходу при нагруженном приводе. Положив подведенное давление = ( 0,75 ... 0,85 ) Рном=0,82,5106=2106 Па.

Для оптенциометра принимаем напряжение питания Uп=27 В и определяем коэффициент передачи ОС, В/м

Назначаем добротность ЭГСП, 1/с

по значению которой устанавливаем коэффициент передачи электрического блока , 1/Ом

7. Принимаем приведенный модуль упругости гидроцилиндра Ец= 0,9 Е = 0,9 1,4 109 = 1,26 109 Па (согласно [4] для минерального масла ИГП-30 S = 1400 МПа) и коэффициент относительного демпфирования 𝛏ц = 0,25.
Оцениваем механическую постоянную времени гидроцилиндра, с

Устанавливаем значение постоянной времени и коэффициента относительного демпфирования ЭГУ


Определяем параметры передаточной функции ЭГСП ( 14 ) по выражениям ( 15 )
Имеем

Проверка устойчивости по Гурвицу согласно (16) дает положительный результат
 =
=

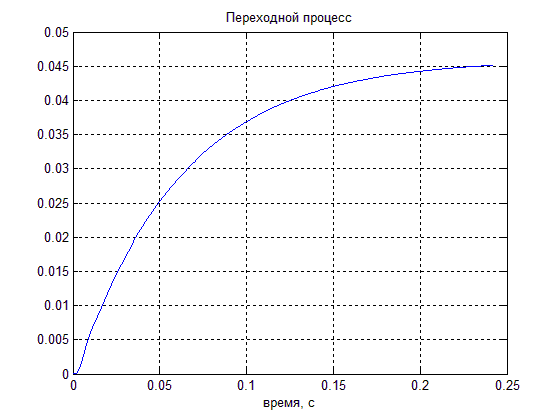
Рис. 6 Переходной процесс
8. Расчет в МАТLAB переходного процесса представлен на рис. 6. Для повышения качества регулирования следует рекомендовать установку в электрической цепи звена предварения сигнала ОС Uос с целью уменьшения колебательности и звена предварения сигнала рассогласования UЕ с целью увеличения быстродействия.