

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ВОСТОЧНОУКРАИНСКИЙ НАЦИОНАЛЬННЫЙ УНИВЕРСИТЕТ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению заданий по курсу
«Система автоматического управления».
ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО
СЛЕДЯЩЕГО ПРИВОДА
(для студентов, обучающихся по направлению "Машиностроение")
Общие положения
Электрогидравлический следящий привод (ЭГСП) предназначен для воспроизведения с заданной точностью рабочим органом управляющего сигнала, изменяющегося по произвольному закону.
ЭГСП имеют электрическую обратную связь и выходной сигнал: в виде электрического напряжения. Принцип действия ЭГСП состоит в непрерывном сравнении входного сигнала с перемещением выходного звена и регулировании потока рабочей среды пропорционально рассогласованию названных величин.
В методических указаниях рассматривается ЭГСП с дроссельным регулированием и поступательным движением выходного звена. Для приобретения навыков расчета и закрепления лекционного материала предусмотрено выполнение индивидуального задания. Задание оформляется па листах формата А4 и должно включать: титульный лист, реферат, содержание, введение, условие задания, расчеты, заключение, список литературы, приложения. При усвоении материала рекомендуется использовать учебную литературу [1...33] .
1. Принципы построения эгсп с дроссельным регулированием
Рассмотрим принцип действия типового ЭГСП (рис.1а). При подаче управляющего напряжения U на вход электронного блока 1 возникает ток в обмотке управления электромеханического преобразователя 2, якорь которого вместе с заслонкой 3 отклоняется от нейтрального положения между соплами 4. При этом изменяются расходы через дроссели 5 и соответственно давления на торцах золотника 6. Золотник 6 под действием разности управляющих давлений смещается от нейтрального положения, соединяя одну полость гидроцилиндра 7 с напорной линией, а другую - со сливной линией. Поршень 8 под действием разности давлений в полостях гидроцилиндра перемещается до тех пор, пока управляющее напряжение U не будет скомпенсировано напряжением Uос, подводимым к электронному блоку 1 с выхода потенциометра 9 обратной связи. После этого ток в обмотке электромеханического преобразователя 2 становится равным нулю, заслонка 3 и золотник 6 приходят в нейтральное положение, а поршень 5 занимает новое установившееся положение. Таким образом, изменяя управляющее напряжение U , можно управлять положением выходного звена привода.
Принцип построения ЭГСП отражается структурной схемой (рис.1), в которой представлены электрический блок (ЭБ), электромеханический преобразователь (ЭМП), гипроусилитель (ГУ), гидродвигатель (ГД), электрическая обратная связь (ОС). В ЭБ обычно включаются сумматор, усилитель напряжения, корректирующий контур и усилитель мощности.
В большинстве случаев ЭМП и ГУ конструктивно объединены в одно устройство - электрогидравлический усилитель (ЭГУ).
В рассмотренном примере ЭГУ образует ЭМП, преобразователь "сопло-заслонка" и дросселирующий распределитель. ЭГУ представлены в номенклатуре серийно выпускаемого гидрооборудования как дросселирующие гидрораспрецелители с электрическим управлением и гидроаппаратура с пропорциональным управлением [4,5].

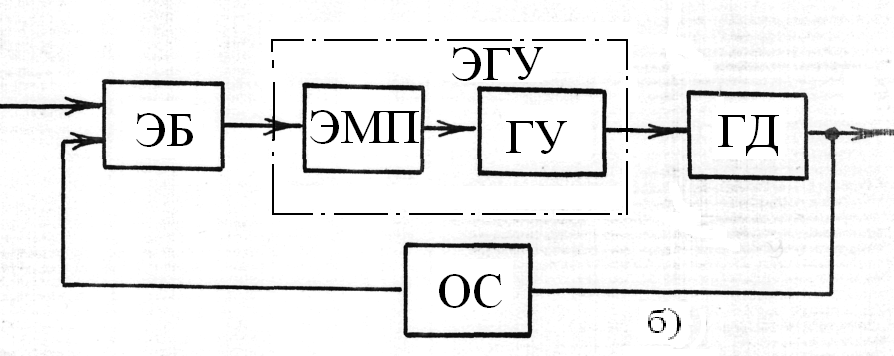
Рис. 1. Принципиальная (а) и структурная (б) схемы простейшего ГСП: ЭБ - электрический блок; ЭМП - электромеханический преобразователь; ГУ - гидроусилитель; ЭГУ - электрогидравлический усилитель; ГД - гидродвигатель; ОС - обратная связь.
Электрическая ОС в ЭГСП с поступательным движением выходного звена чаще всего формируется посредством потенциометра.
Обычно ЭГСП проектируется с использованием стандартных гидравлических модулей, в частности, ЭГУ и ГД, а перед проектно-конструкторскими работами выполняется предварительный расчет.