

Регулирование по возмущению
Регулирование по возмущению производится в соответствии со схемой системы, приведенной на рис. 1.4.

Рис. 1.4 Схема системы регулирования по возмущению.
Регулирование по возмущению заключается в следующем: - датчик нагрузки измеряет значение нагрузки ОР, так что сигнал на его выходе Fд соответствует действительному значению нагрузки F; - на регулятор подается сигнал измеренной нагрузки Fд;
- регулятор по сигналу Fд изменяет регулирующее воздействие G таким об- разом, чтобы регулируемая величина X оставалась постоянной.
Например, при регулировании по возмущению давления пара в котле увеличение расхода пара из котла на 50% должно вызвать одновременное увеличение регулятором расхода топлива в котел на 50% (без учета изменения полезного действия котла в зависимости от нагрузки).
Особенности регулирования по возмущению:
- системы регулирования, работающие по возмущению, являются разомкнутыми, следовательно, в данном случае отсутствует проблема устойчивости системы;
- поскольку регулирующее воздействие формируется одновременно с возмущением на ОР, в данных САР теоретически возможно регулирование без ошибки;
- регулятор реагирует только на измеряемое возмущение и не учитывает изменение других воздействий на ОР и изменение его эксплуатационных характеристик;
- практически невозможно абсолютно точно установить значение регулирующего воздействия G соответственно нагрузке объекта F и получить, тем самым, требуемую точность регулирования.
Последняя особенность имеет существенное значение для нейтральных ОР, когда даже небольшое несоответствие между нагрузкой и регулирующим воздействием приведет к непрекращающемуся изменению регулируемой величины, что может привести к аварии элемента СЭУ.
Данный эффект показан на рис. 1.5, на котором приведен пример переходных процессов при регулировании по возмущению. Так может работать система регулирования по возмущению уровня воды в паровом котле. Из графиков переходных процессов следует, что неравенство нагрузки ОР (расхода пара из котла) и регулирующего воздействия (расхода питательной воды в котел) вызывает такое уменьшение регулируемой величины (уровня воды в котле), которое может привести к аварии котла.
Вследствие рассмотренных особенностей регулирования по возмущению данный принцип в судовых системах регулирования практически не применяется.
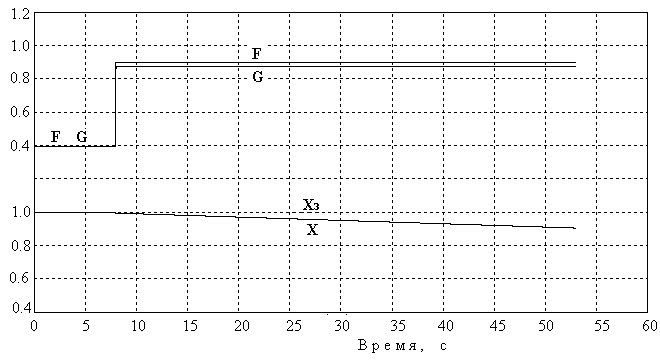
Рис. 1.5 Пример переходных процессов при регулировании по возмущению в САР с нейтральным объектом.
Комбинированное регулирование
Комбинированное регулирование заключается в использовании в одной системе обоих рассмотренных выше принципов регулирования.
Схема системы регулирования в этом случае имеет вид, представленный на рис. 1.6.
Комбинированные системы регулирования обладают достоинствами регулирования по отклонению и возмущению, но техническая реализация этих систем является более сложной.
Комбинированное регулирование позволяет существенно повысить качество поддержания регулируемой величины.
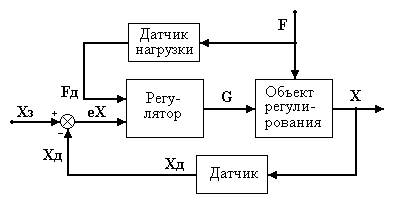
Рис. 1.6 Схема системы комбинированного регулирования.
Будем полагать, что преобразование входных сигналов eX и Fд производится в регуляторе таким образом, что формируемое регулятором регулирующее воздействием G является суммой двух составляющих:
G = Gf + Ge,
где Gf - составляющая, вырабатываемая по сигналу измеренного возмущения (нагрузки ОР) Fд,
Ge - составляющая, вырабатываемая по сигналу ошибки регулирования eX.
Рассмотрим действие комбинированного регулятора при изменении нагрузки ОР, когда графики изменения величин САР имеют вид, показанный на рис. 1.7:
- изменение нагрузки F вызывает одновременное изменение регулирующего воздействия G на величину Gf;
- вследствие погрешности формирования Gf регулируемая величина X будет изменяться;
- изменение регулируемой величины X будет определяться только погрешностью формирования регулирующего воздействия G за счет нагрузки F, и возникающая при этом ошибка регулирования eX будет существенно меньше, чем при регулировании только по отклонению;
- эта ошибка устраняется за счет составляющей регулирующего воздействия Ge, формируемой по сигналу отклонения eX, что может быть достигнуто достаточно простыми средствами.
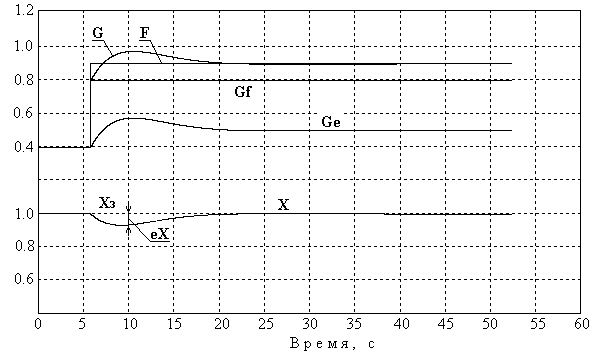
Рис. 1.7 Пример переходных процессов при комбинированном регулировании.
На современном уровне развития систем автоматизации, когда в регуляторах широко используются микропроцессоры, позволяющие получать программным путем практически любые по сложности преобразования сигналов, принцип комбинированного регулирования является наиболее перспективным.