

7.1 Автоколебания в контуре регулятора
Причиной возникновения автоколебаний в контурах регуляторов, рассмотренных в двух предыдущих разделах, является инерционность движущихся частей ИМ и регулирующих органов.
Пример таких автоколебаний показан на рис. 7.1. частота и амплитуда колебаний ИМ определяются: - массой движущихся частей ИМ и регулирующего органа, - временем исполнительного механизма Тим, - зонами нечувствительности Dн и возврата Dв.
Автоколебания могут привести к поломке ИМ и регулирующего органа.
Они должны быть устранены путем выбора зоны нечувствительности по следующей методике: - объект регулирования с включенным регулятором выводится на постоянную минимально устойчивую нагрузку, - на регуляторе устанавливается максимальное значение Dн (если при этом в регуляторе возникают колебания, то он неисправен), - постепенно уменьшается значение Dн до появления колебаний, - значение Dн увеличивается минимально возможным шагом до прекращения колебаний.

Рис. 7.1 Автоколебания в контуре электрического регулятора с жесткой обратной связью.
В результате настройки регулятор имеет: - минимально допустимую зону нечувствительности, обеспечивающую отсутствие колебаний, - максимально достижимую точность регулирования.
7.2 Автоколебания в системе регулирования
Автоколебания в системе регулирования возникают вследствие того, что на постоянной нагрузке ОР регулятор устанавливает значение регулирующего воздействия с погрешностью по отношению к значению нагрузки ОР.
Примером в этом случае может служить то, что в системе регулирования давления пара в котле расход топлива в котел будет не соответствовать расходу пара из котла.
В регуляторах с интегральной составляющей в законе регулирования (ПИ и ПИД регуляторы) обязательно будут возникать автоколебания как при регулировании устойчивых, так и нейтральных объектов.
В этих регуляторах упомянутая выше погрешность вызовет отклонение регулируемой величины от заданного значения, тогда как непрерывные регуляторы с данными законами регулирования имеют нулевое отклонение на равновесных режимах.
Отклонение, поступающее на вход интегратора, вызовет изменение интегральной составляющей и, следовательно, сигнала на выходе последовательного КУ. Это, в свою очередь, приведет к изменениям регулирующего воздействия и регулируемой величины, переходящим в автоколебания.
На рис. 7.2 показаны автоколебания в системе регулирования давления пара в судовом паровом котле с ПИД регулятором. Результаты были получены на компьютерном тренажере электрической системы регулирования давления в котле, разработанном автором. Регулятор выполнен по схеме, приведенной на рис. 6.1.
П оследовательное КУ в данном случае формирует ПИД закон в соответствии с передаточной функцией:
.
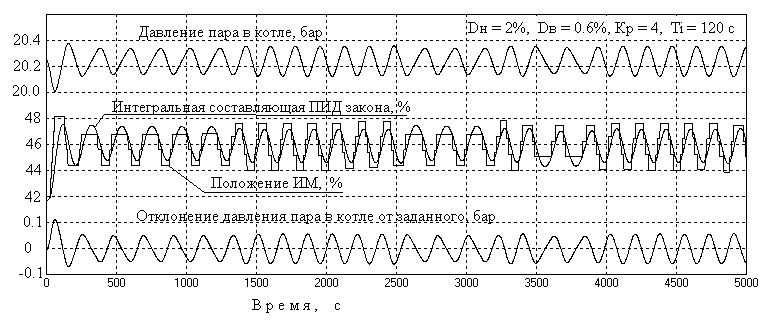
Рис. 7.2 Автоколебания в системе регулирования давления пара в судовом вспомогательном котле (ПИД регулятор).
Интегральная составляющая закона регулирования выражается как
,
где в данном случае
eX(t) = Ркз – Рк(t) представляет собой отклонение давления пара в котле Рк от заданного значения Ркз.
Из графиков на рис. 7.2 видно, что изменение интегральной составляющей Ui(t) и перемещение ИМ соответствуют друг другу.
В системе регулирования с П или ПД регулятором и устойчивым объектом регулирования возникновение автоколебаний не является обязательным.
Например, в системе регулирования давления пара в котле автоколебания имеют место при коэффициенте пропорциональности Кр = 4 (см. рис. 7.3), тогда как при Кр = 2 автоколебания отсутствуют.

Рис. 7.3 Автоколебания в системе регулирования давления пара в судовом вспомогательном котле (П регулятор).
Также автоколебания должны возникать в системе регулирования нейтрального объекта при любом законе регулирования.
Это является следствием того, что несоответствие нагрузки объекта и регулирующего воздействия приводит к неограниченному (теоретически) изменению регулируемой величины.
Примером этого может служить система регулирования уровня воды в судовом паровом котле, когда указанное выше несоответствие вызывает, в конечном счете, аварийное повышение или понижение уровня.
На рис. 7.4 показаны автоколебания в системе регулирования нейтрального объекта с П регулятором при коэффициенте пропорциональности Кр = 2.
Нейтральным ОР в
данном случае является паровой котел
как объект регулирования давления пара.
Для того чтобы котел стал нейтральным
ОР в его математической модели на
упомянутом выше тренажере была отключена
зависимость расхода пара из котла от
давления в котле.

Рис. 7.4 Автоколебания в системе регулирования давления пара в судовом вспомогательном котле как нейтральном объекте регулирования (П регулятор).
Рассмотренные выше автоколебания все же не ухудшают существенно качество работы судовых электрических САР.
На примере системы регулирования давления пара в котле видно, что при значении зоны нечувствительности в следящей системе Dн = 2% амплитуда автоколебаний давления пара не превышает 0.1 бара (см. рис. 7.2, 7.3). Такая величина будет практически незаметна на судовых показывающих приборах.
Поэтому для всех агрегатов и механизмов СЭУ (кроме дизелей) можно применять достаточно простые электрические регуляторы, содержащие ИМ с постоянной скоростью.
Для регулирования частоты вращения дизелей, где требуется повышенная точность управления положением топливной рейки, применяются рассматриваемые далее электрические регуляторы с переменной скоростью перемещения ИМ.