

Коэффициент усиления эквивалентного усилителя Кэу в этом случае
является достаточно большим для применения формулы (2.5) к рассматриваемому регулятору
![]() .
(5.3)
.
(5.3)
Таким образом, преобразованием структурной схемы регулятора показано, что данный регулятор работает по П закону регулирования.
Регулятор не может обеспечить погрешность регулирования меньшую Db.
6 Электрические регуляторы с типовыми законами регулирования
Для получения электрического регулятора с любым типовым законом регулирования применяется рассмотренная в разделе 2.3 типовая комбинированная система автоматического регулирования, схема которой показана на рис. 2.7.
В случае использования электрического регулятора его схема имеет вид, представленный на рис. 6.1.
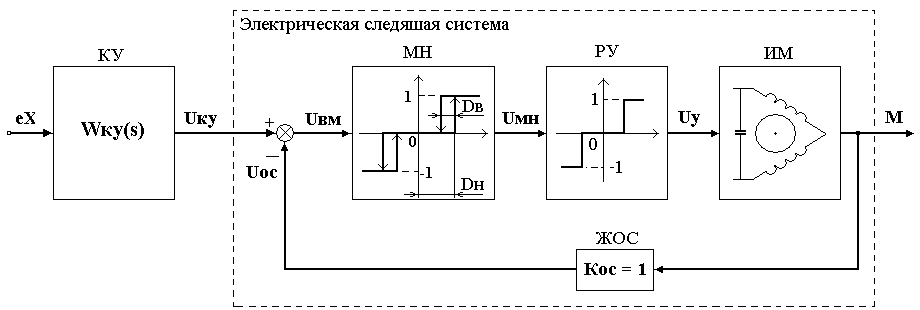
Рис. 6.1 Схема регулятора с последовательным КУ и следящей системой.
Регулятор содержит: - последовательное корректирующее устройство КУ, передаточная функция которого Wку(s) соответствует необходимому закону регулирования (см. раздел 3); - электрическую следящую систему, которая образована элементами, обве- денными штриховым контуром.
На равновесных режимах работы регулятора (когда Uмн=0 и Uу=0) выполняется условие:
|Uку – Uос|= |Uвм| < Dн ,
то есть с точностью до зоны нечувствительности Dн
Uос Uку .
Поскольку Uос = Кос М и для следящей системы Кос = 1, то
М Uку .
Это означает, что следящая система перемещает исполнительный механизм в положение, соответствующее выходному сигналу КУ.
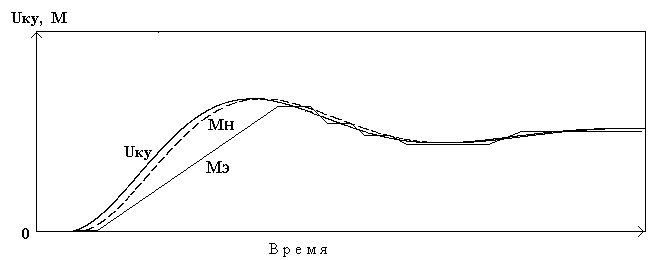
Рис. 6.2 Пример работы электрической следящей системы.
Пример графика работы электрической следящей системы показан на рис. 6.2, где обозначено: Uку – изменение сигнала на выходе КУ, Мн – перемещение ИМ в непрерывной следящей системе с переменной скоростью ИМ, Мэ – перемещение ИМ в электрической следящей системе с постоянной скоростью ИМ.
Также как и для регулятора с жесткой обратной связью (см. раздел 5) в данной следящей системе МН и РУ можно приближенно заменить эквивалентным непрерывным линейным усилителем и получить следующую приближенную передаточную функцию следящей системы, аналогичную выражению (5.3):
![]() .
(6.1)
.
(6.1)
Структурная схема рассматриваемого регулятора может быть представлена в виде, показанном на рис. 6.3.
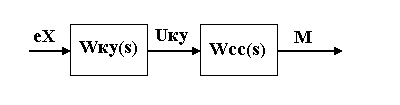
Рис. 6.3 Структурная схема регулятора со следящей системой.
Передаточная функция регулятора в этом случае имеет вид:
Wрег(s) = Wку(s) Wсс(s)
или с учетом выражения (6.1)
Wрег(s) Wку(s) .
Таким образом, данный регулятор перемещает ИМ в соответствии с законом регулирования, заложенным в последовательном КУ.
В данном регуляторе также может быть сделано дистанционное управление, аналогично типовой комбинированной системе регулирования (см. рис. 2.12 в разделе 2.3).
Рассмотренный принцип построения регуляторов используется в электрических регуляторах частоты вращения судовых дизелей фирм Norcontrol [28], Lyngso Marine [30], Nabco [32].
7 Автоколебания в системах регулирования с электрическими регуляторами
В замкнутых системах, содержащих релейные элементы типа МН, возможно возникновение автоколебательных режимов [2].
В таких системах могут появиться: - высокочастотные колебания в контуре регулятора, охваченном обратной связью, - относительно низкочастотные колебания в контуре всей системы регулирования.