

1.3 Приклад синтезу двокаскадної аср
1.3.1 Умова задачі
Розрахувати приблизні настройки регуляторів в двокаскадній АСР, якщо передаточні функції об’єкта за основним та допоміжним каналами і передаточні функції регуляторів відповідно дорівнюють:
![]() ;
;
![]() ;
;
![]() ;
;
 .
.
1.3.2 Рішення задачі
Враховуючи,
що швидкодія допоміжного контуру
регулювання набагато більше, аніж
основного
![]() вибирають I метод синтезу двокаскадної
АСР. Розрахунок виконують за вищенаведеним
алгоритмом:
вибирають I метод синтезу двокаскадної
АСР. Розрахунок виконують за вищенаведеним
алгоритмом:
Визначають приблизне значення передаточної функції еквівалентного об’єкта основного регулятора за вираженням (1.3)
![]() .
.
Розраховують приблизні настройки основного регулятора, тобто виконують синтез одно контурної замкнутої системи з еквівалентним об’єктом. Визначають амплітудно-частотну та фазочастотну характеристики еквівалентного об’єкта
![]() (1.6)
(1.6)
![]() (1.7)
(1.7)
Результати розрахунків модуля та фази амплітудно-фазової характеристики (АФХ) еквівалентного об’єкта за формулами (1.6, 1.7) заносять у таблицю 1.1.
Таблиця 1.1
Дані для побудови АФХ еквівалентного об’єкта та розімкнутої системи
ω, рад/с |
АФХ об’єкта |
Вектор
|
|||
А0(ω) |
φ0(ω), град. |
Ті = 4 с |
Ті = 6 с |
Ті = 10 с |
|
0,15 |
0,325 |
-71,0 |
0,541 |
0,361 |
0,217 |
0,20 |
0,272 |
-85,2 |
0,340 |
0,227 |
0,136 |
0,30 |
0,204 |
-108,9 |
0,170 |
0,113 |
0,068 |
0,40 |
0,165 |
-128,8 |
0,103 |
0,069 |
0,041 |
0,50 |
0,141 |
-148,1 |
0,070 |
0,047 |
0,028 |
Будують АФХ об’єкта за даними таблиці 1.1 у вибраному масштабі (рис. 1.1). Точки характеристики А1, А2, А3,... для відповідних частот з’єднують з початком координат відрізками ОА1, ОА2, ОА3,....
Для побудови АФХ розімкнутої системи з коефіцієнтом підсилення регулятора kр = 1 і деяким заданим часом інтегрування Ті розраховують вектор
![]() (1.8)
(1.8)
Результати розрахунку заносять у таблицю 1.1. До відрізків ОА1, ОА2, ОА3,... встановлюють перпендикуляри, на яких у вибраному масштабі відкладають вектори ΔА(ω) і з’єднують отримані точки плавною кривою.
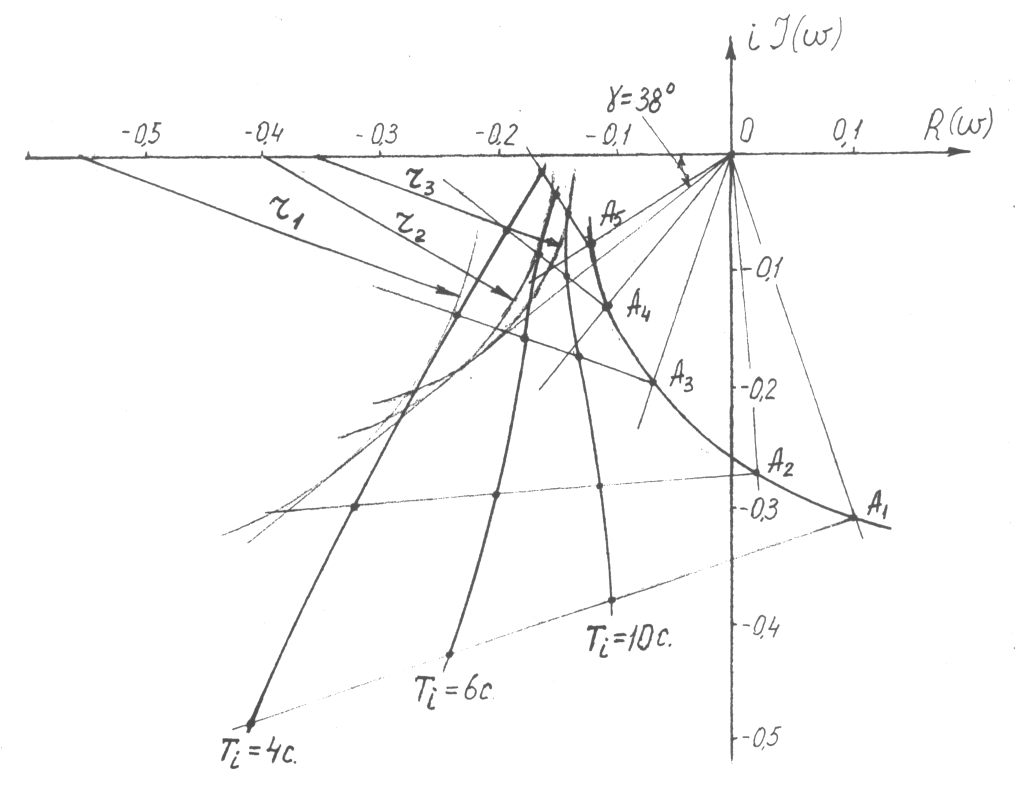
Рис. 1.1. Визначення настройок основного регулятора графоаналітичним методом
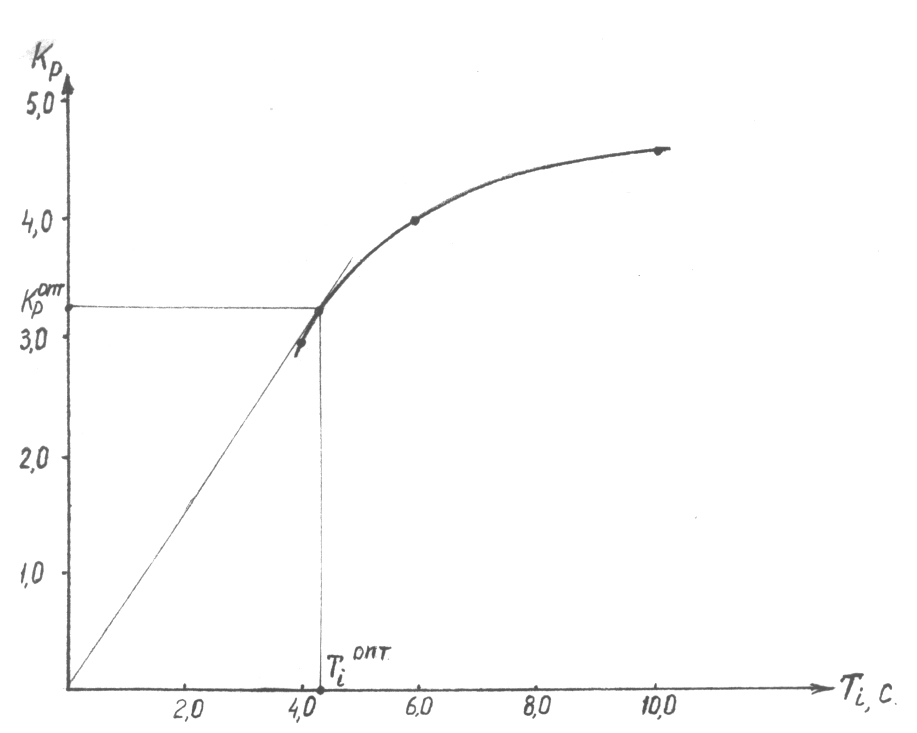
Рис. 1.2. Границя зони заданої ступені коливальності
Вибирають
ступінь коливальності (наприклад, М
≈ 1,6) з початку координат проводять
пряму лінію під кутом
![]() до дійсної від’ємної напіввісі. Будують
кола з центрами на цій вісі, які одночасно
дотикаються відповідних АФХ розімкнутих
систем і прямої, проведеної під кутом
38°. Визначені у відповідності з масштабом
радіуси кіл rі
та розраховані коефіцієнти передач
регулятора за формулою
до дійсної від’ємної напіввісі. Будують
кола з центрами на цій вісі, які одночасно
дотикаються відповідних АФХ розімкнутих
систем і прямої, проведеної під кутом
38°. Визначені у відповідності з масштабом
радіуси кіл rі
та розраховані коефіцієнти передач
регулятора за формулою
![]()
записують у таблицю 1.2.
Таблиця 1.2
Ті , с |
rі |
|
4 |
0,342 |
2,9 |
6 |
0,247 |
4,0 |
10 |
0,217 |
4,6 |
За результатами розрахунку в площині параметрів настройки регулятора будують границю зони заданої ступені коливальності (гасіння) (рис. 1.2) і проводять дотичну із початку координат цієї границі. Точка дотику і визначає оптимальні параметри настройки
kропт = 3,25 Тіопт = 4,3 с.
Знаходять приблизну передаточну функцію еквівалентного об’єкта допоміжного регулятора W1екв.0(р) за вираженням (1.4)
![]() .
.
Розраховують приблизні настройки допоміжного регулятора за відомими формулами [3] для типового перехідного процесу регулювання з мінімальною площею відхилення
![]()
![]() с.
с.
На цьому перший цикл розрахунку і в цілому розв’язання задачі закінчується. Визначені настройки регуляторів
![]() с
с
![]() с.
с.