

3. Порядок выполнения работы.
1.Оценить влияние напряжения питания на работу сельсина в индикаторном режиме, для чего: включить П1; включить ЛАТР в сеть; подать напряжение питания в обмотку возбуждения (ОВ) от ЛАТРа 110В.
2.Вращая маховик СД, через каждые 10° показаний измерительной стрелки СД снять показания измерительной стрелки СП.
3.Выполнить пункт 2 при напряжении питания ОВ 90В и 130В.
4.По
результатам выполненных измерений
построить график
![]() ,
где
,
где
![]() ,
a
Uob-
напряжение
питания обмоток возбуждения.
,
a
Uob-
напряжение
питания обмоток возбуждения.
5.
Установить напряжение питания
![]() изменяя
сопротивление линий связи R1,
R2,
R3,
построить график зависимости
изменяя
сопротивление линий связи R1,
R2,
R3,
построить график зависимости
![]() ,где
RЛ
= R1
=R2=R3=
var.
,где
RЛ
= R1
=R2=R3=
var.
6.
Застопорить СП в нулевом положении,
включить П2,
изменяя положение ротора СД через 10°
снять характеристику.
![]() ,
где
- угол поворота ротора сельсина-датчика.
,
где
- угол поворота ротора сельсина-датчика.
7.
Построить статическую характеристику
сельсинов в трансформаторном режиме
![]() ,
для чего выключить П1,
выключить П2,
застопорить ротор СП; вращая ротор СД
через 10° снять значения показаний
вольтметра V2
,
для чего выключить П1,
выключить П2,
застопорить ротор СП; вращая ротор СД
через 10° снять значения показаний
вольтметра V2
8.Выполнить статистическую обработку результатов опытов.
4. Отчет.
Отчёт
должен содержать: принципиальные схемы
сельсинов с трёхлучевой роторной и
статорной обмотками; схему
экспериментальной установки;
характеристики
,![]() ,
,![]() ;
;
![]() ,
основные теоретические положения,
статистическую обработку результатов
экспериментов.
,
основные теоретические положения,
статистическую обработку результатов
экспериментов.
5. Вопросы для самопроверки.
Принцип действия контактного сельсина?
В чем отличие трансформаторного и индикаторного режимов работы сельсина?
Как влияет напряжение питания ОВ на работу сельсина?

Рис.2. Схема экспериментальной установки.
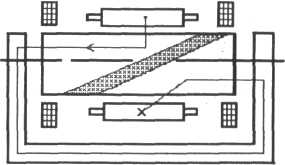
Рис.3.Принципиальная схема бесконтактного сельсина
Работа № 10. Контроль частоты вращения.
1. Цель работы.
Изучение работы механического тахометра ИО-10, поверка тахометрогенератора ТД - 1 и стробоскопа.
2. Описание лабораторной установки.
Принцип действия механических тахометров основан на использовании центробежной силы F развиваемой телом при вращении его вокруг оси
![]()
где m- масса тела;
r - расстояние центра тяжести от оси вращения;
![]() -
угловая скорость.
-
угловая скорость.
Механические центробежные тахометры по конструктивному исполнению делят на переносные и стационарные. В настоящее время находят применение переносные тахометры ИО-10 и стационарные ТС-100 и ТС-200. Ручные механические тахометры выполняют обычно с грузовым кольцом. Они имеют коробку передач, позволяющую использовать прибор в широком диапазоне измерению числа оборотов (от 25 до 10000 об/мин.). Ручные тахометры снабжаются набором съёмных наконечников: при малом числе оборотов служит наконечник с металлической насадкой; при большом - с резиновой. Контрольные тахометры имеют погрешность 0,5÷1,0%, а рабочий -1÷8%.
В качестве измерителей числа оборотов гребных валов чаще всего используются тахогенераторы постоянного тока, асинхронные тахогенераторы и индукционные преобразователи с вращающимся полем.
Тахогенератор постоянного тока представляет собой обычную коллекторную машину постоянного тока малых габаритов. Его принципиальная электрическая схема показана на рис.1.
Для статической характеристики ТГ при работе его в холостую справедлива следующая зависимость:
U![]()
где UВПХ - напряжение на выходе генератора, индуктируемое при вращении ротора, В;
n - число оборотов ротора об/мин;
kтг - статический коэффициент при холостом режиме, В.об/мин.
![]()
где: Р-число пар полюсов,
b - число параллельных ветвей обмотки якоря,
N - число активных проводников обмотки якоря,
Ф - суммарный магнитный поток машины.
Для
используемых генераторов с учётом
условий применения пределы постоянных
имеют следующие значения: Ктг=0,029÷0,057
В.об.мин. Выходное напряжение Uвых
зависит
не только от числа оборотов n,
но и от сопротивления нагрузки. При Rн
>>
Rb
зависимость
Uвых=
f(n)
будет практически линейной. Для судовых
приборов
![]() лежит
в пределах 50÷60.
лежит
в пределах 50÷60.
Асинхронные тахогенераторы используются в схемах компенсационных тахометров. Электрическая схема асинхронного тахогенератора представлена на рис.2, где 1- оболочка возбуждения, получающая питание от сети переменного тока, 2- стакан, 3- генераторная обмотка.
При питании обмотка возбуждения создаёт пульсирующий магнитный поток.
![]()
где
![]() -
частота питающего тока, С-1.
-
частота питающего тока, С-1.
Если же ротор привести во вращение, то в нём кроме ЭДС трансформации, наводимой потоком обмотки возбуждения, появится ЭДС вращения за счёт пресечения ротором магнитных линий потока возбуждения. Созданные этой ЭДС в короткозамкнутом роторе токи обуславливают появление переменного магнитного потока Ф2, совпадающего по направлению с осью генераторной обмотки 3 и наводящего в ней ЭДС, величина которой зависит от числа оборотов ротора, а фаза определяется направлением вращения. Для упрощённого качественного рассмотрения короткозамкнутый круглый ротор можно представить в виде двух взаимно перпендикулярных "обмоток", создающих при вращении ротора магнитные потоки:
![]()
где
![]() - коэффициент пропорциональности,
- коэффициент пропорциональности,
- угловая скорость вращения.
Сумма проекций этих потоков на ось генераторной обмотки
![]()
будет вызывать в данной обмотке ЭДС.
U![]()
При соответствующем выборе параметров тахогенератора можно обеспечить зависимость UВПХ от n весьма близкую к линейной в достаточно широких пределах.
Принципиальная схема индукционного преобразователя с вращающим полем показана на рис.3. В поле вращающего магнита 1 расположен металлический стакан 2, укреплённый на оси 3.
На этой же оси укреплён один конец пружины 4 из фосфористой бронзы и стрелка 5. Второй конец пружины укреплён неподвижно. При вращении магнита в стакане 2 индуктируется ЭДС, создающая токи, силы взаимодействия которых с вращающимся полем магнитов двигают диски в направлении вращения магнита. Вращающему магниту, создаваемому взаимодействием токов диска и поля магнита, противодействует момент пружины 4. Установившееся отклонение стакана, а следовательно, и стрелки прибора соответствует равенству вращающегося и противодействующего моментов.
Уравнение статической характеристики преобразователя можно найти, используя зависимость
![]()
где h - коэффициент вязкого трения;
Μ - противодействующий момент; Спр - постоянная пружина;
- угол поворота стакана.
Уравнение статической характеристики можно записать в виде:
![]()
где
кд=1,2÷1,8
Работа
стробоскопов (стробоскопических
тахометров ) основывается на эффекте
кажущейся остановки вращения вала. Этот
эффект достигается путём периодического
прерывания светового потока, идущего
от вращающего вала или предмета к глазу
наблюдателя [1]. При этом частота прерывания
настраивается и должна быть такой, чтобы
каждый раз была видна одна и та же деталь
вращающего вала, а длительность перерыва
наблюдения вращения не превышала
времени, в течение которого может
полностью исчезнуть зрительный образ
этой детали вала. При повторении
импульсов с такой частотой остатки
зрительного образа сливаются в картину
кажущейся неподвижности отмеченной
детали вращающего вала или предмета.
Следовательно, в этом случае частота
следования f1
имп/с равна скорости вращения вала или
предмета n1
об/с т.е. f
= n.
Такой стробоскопический эффект
неподвижности называется основным
синхронизмом. Именно в этом случае
необходимо производить снятие показаний
стробоскопа. Может иметь место так
называемый кратный синхронизм, когда
![]() или
или
![]() ,
при котором
фиксированная точка за время между
зрительными импульсами успевает
совершать i
оборотов, либо частота зрительных
образов в i
раз
больше частоты вращения. Чтобы избежать
ошибки, правильной следует считать
наибольшую частоту, при которой имеет
место основной синхронизм f=n
,
при котором
фиксированная точка за время между
зрительными импульсами успевает
совершать i
оборотов, либо частота зрительных
образов в i
раз
больше частоты вращения. Чтобы избежать
ошибки, правильной следует считать
наибольшую частоту, при которой имеет
место основной синхронизм f=n
По принципу действия стробоскопы разделяют на механические и электронные. Электронные стробоскопы позволяют проводить измерения с погрешностью не более ± 0.1%
Схема экспериментальной установки показана на рис.4. Она включает в себя двигатель 3, ручной тахометр 9, асинхронный тахогенератор 4 и стробоскоп электронный 1. Для регулирования частот вращения двигателя 3 служит регулятор РНТ-7.