

3. Порядок выполнения работы.
1.Снять
статические характеристики индуктивного
датчика М =f(l)
при разных значениях напряжения
питания (напряжение питания задаётся
преподавателем). Величина перемещения
плунжера l
определяется по индикатору 3, а значение
взаимной индуктивности М находим
расчётным путём по формулам (2) и (3).
Значение М для одной из точек проверить
расчётным путём по формулам (1) и (4),
считая, что
![]() ,
=1350 витков, /мaх=7мм,
=2000.
,
=1350 витков, /мaх=7мм,
=2000.
![]() -
находится опытным путём (измеряются
индикатором 2 и штангенциркулем). Графики
построить, используя не менее десяти
точек. Плунжер датчика перемещается
микрометрическим винтом.
-
находится опытным путём (измеряются
индикатором 2 и штангенциркулем). Графики
построить, используя не менее десяти
точек. Плунжер датчика перемещается
микрометрическим винтом.
2.Снять градуировочную характеристику прибора ДПР 1, для чего: подключить датчик к прибору ДПР I к точкам a'.b'.c'.d'; включить прибор ДПР 1 и дать ему прогреться в течение 5 минут; изменяя положение плунжера датчика микрометрическим винтом, записать показания индикатора 2 и показывающей стрелки прибора. Пройти всю шкалу прибора в прямом и обратном направлении и построить график = f(l), где - показания прибора, / - перемещение плунжера датчика. Выполнить пункт 2 для прибора АД 140, С1-05.
3.Выполнить статистическую обработку результатов экспериментов.
4. ОТЧЁТ.
Отчёт
должен содержать: принципиальную схему
прибора АД 140; схему лабораторной
установки; статические характеристики
индуктивного датчика при разных значениях
напряжения питания; расчёты взаимной
индуктивности; градуировочные
характеристики приборов ДПР 1 , АД 140 и
![]() С1-05.
С1-05.
5. Вопросы для самопроверки.
1 В чём отличие индуктивного датчика от взаимоиндуктивного датчика?
2 Для чего нужна кнопка КК в принципиальной схеме прибора АД 140?
3 Какова роль корректирующей катушки?
4 Как устроен дифференциальный трансформаторный индуктивный датчик?
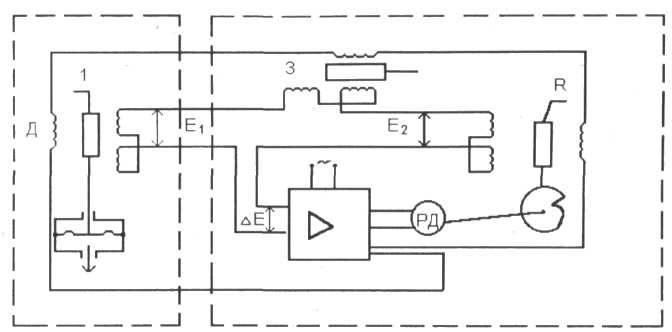
Рис. 1. Дифференциально - трансформаторная система передачи.
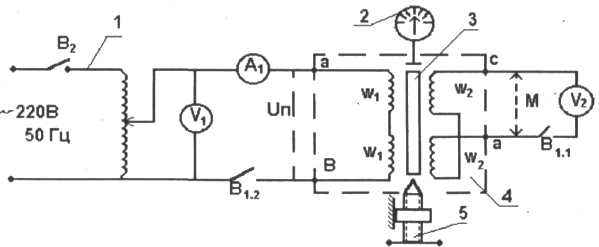
Рис.2. Схема экспериментальной установки (трансформаторная схема подключения индуктивного датчика).
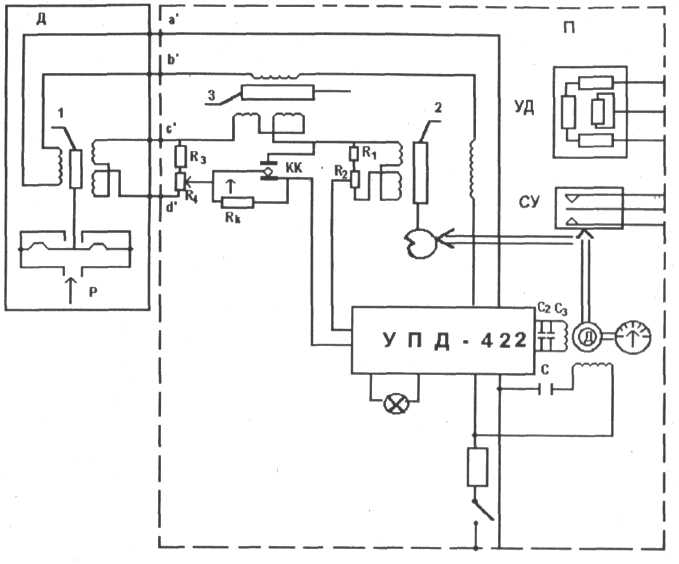
Рис. 3. Принципиальная схема прибора АД - 140
Работа № 5.
ИСПЫТАНИЕ СЕЛЬСИННОГО УКАЗАТЕЛЯ.
1. Цель работы.
Изучение работы сельсинного указателя положения типа УП для измерения угловых перемещений и дистанционной передачи показаний положения.
2. Описание лабораторной установки
Сельсинами называются индукционные электрические микромашины, обладающие способностью синхронизации. Особенностью применения сельсинов в автоматических системах является использование их в паре: сельсин-датчик (СД) и сельсин-приемник (СП). Сельсинная пара может работать в двух режимах: индикаторном, предназначенном для дистанционной передачи команд или управляющих сигналов; трансформаторном, используемом при измерении разности между угловыми положениями механически несвязных валов.
Сельсин конструктивно выполняется либо с трёхлучевой роторной обмоткой, либо с трёхлучевой статорной обмоткой (см. рис. 1). Следует отметить, что при любом исполнении напряжения питания подводятся к однофазной обмотке.
Большое распространение получили и бесконтактные сельсины, работа которых в индикаторном и трансформаторном режимах подобна работе контактных сельсинов.
В основу работы однофазного сельсина положено свойство изменения взаимоиндукции между обмотками статора и ротора при повороте вала ротора относительно исходного положения. На обмотку возбуждения подаётся синусоидальное напряжение
![]()
Будем
считать, что активное сопротивление
обмотки возбуждения мало по сравнению
с её индуктивным сопротивлением, а
магнитопровод сельсина не насыщен.
Тогда поток возбуждений будет меняться
также по синусоидальному закону, отставая
по фазе от напряжения на угол
![]()
![]()
Действующее значение индуктируемой э.д.с. в первой катушке будет равно:
![]()
где f - частота напряжения источника питания;
W- число витков одной катушки трёхлучевой обмотки.
При
повороте ротора на угол
магнитный поток будет пронизывать
проводники обмотки первого луча под
углом ,
а второго и третьего лучей соответственно
под углами
![]() и
и
![]() .
Тогда действующие значения э.д.с.
индуктируемых в обмотках, равны:
.
Тогда действующие значения э.д.с.
индуктируемых в обмотках, равны:

Таким образом, действующие значения э.д.с. в катушках трёхлучевой обмотки при вращении ротора изменяются по закону косинуса. Закономерность изменения э.д.с. не зависит от поворота систем обмоток, поэтому безразлично, где располагается обмотка возбуждения на статоре или роторе.
При работе сельсинов в индикаторном режиме трёхлучевые обмотки сельсина-датчика и сельсина-приёмника соединены трёхпроводной линей. К однофазным обмоткам подводится напряжение от одного источника питания. Вал СД жёстко соединяется с валом рабочего механизма. На вал СП устанавливается индикаторная стрелка, регистрирующая положение вала рабочего механизма (см. рис. 2, когда переключатель Π включён).
Сельсин-датчик преобразует угловое положение оси рабочего механизма в группу напряжений, которая в дальнейшем преобразуется сельсином-приёмником в угловое положение своего ротора.
Предположим, что ротор СП повернут на угол β, а вал рабочего механизма и жестко связанный с ним ротор СД повернулся на угол . Тогда под действием магнитного потока возбуждения в обмотках СД индуктируется группа Э.Д.С., действующие значения которых определяются как

Если углы а и β равны, что соответствует отсутствию рассогласования между валами СД и СП, то Е1 = Е'1,Е2 = Е'2 . Так как э.д.с. в обмотках СД направлены навстречу Э.Д.С. обмоток СП, то они полностью компенсируют друг друга, и токи в соединительных проводах отсутствуют. При наличии рассогласования между валами сельсинов (α ≠β ) значения Э.Д.С. Ε и Ε1, в соответствующих катушках трехлучевой обмотки различны, а результирующие её значения в каждой катушке будут представлять следующие разности:
Е' = E1 –Е1"; Е" = Е2-Е"2; Е'" = Е3-Е'3; (3)
Под действием этих Э.Д.С. по соединительным проводам и обмоткам сельсинов потекут токи I1, I2, I3, создавая магнитные потоки, взаимодействующие с магнитным потоком возбуждения. В результате этого взаимодействия на валах сельсинов появятся синхронизирующие моменты, стремящиеся осуществить повороты валов, равные по величине и противоположные по направлениям.
Вал
СП будет поворачиваться под действием
синхронизирующего момента до полной
компенсации рассогласования валов
![]() .
При достижении значения
.
При достижении значения![]() ,
что соответствует одинаковому положению
валов СД и СП, синхронизирующий момент
станет равным нулю.
,
что соответствует одинаковому положению
валов СД и СП, синхронизирующий момент
станет равным нулю.
При работе сельсинов в трансформаторном режиме (см. рис. 2), когда переключатель П выключен) вал СД жестко связан с валом рабочего механизма. Трехфазные обмотки сельсинов соединены трехпроводной линией связи. Обмотка возбуждения СД питается переменным током постоянной амплитуды и частоты. С однофазной обмотки СП снимается выходной сигнал.
Магнитный поток, создаваемый током, протекающим в обмотке возбуждения СД, индуктирует в катушках трехлучевой обмотки СД Э.Д.С., значения которых определяется выражениями (1).
Так как в обмотке СП протекают те же токи, что и в обмотках СД, но имеющие противоположное направление, то магнитодвижущая сила, создаваемая ими, в СП будет иметь линию действия, направленную под углом к оси первой катушки. Направление же вектора магнитодвижущей силы СП будет прямо противоположное по отношению к М.Д.С. сельсина-датчика.
Переменный магнитный ток, создаваемый М.Д.С. в расточке статора СП, индуктирует М.Д.С. в однофазной обмотке, которая и является выходным сигналом
![]()
где Wo- число витков однофазной обмотки;
![]() -
амплитудное значение продольного
магнитного потока.
-
амплитудное значение продольного
магнитного потока.
Рассогласование валов рабочих механизмов приводят к тому, что линия действия М.Д.С. СП будет направлена под углом к продольной оси выходной обмотки и продольная составляющая магнитного потока становится равной
![]()
,а выходное напряжение
![]() (4)
(4)
где
![]() -
максимальное эффективное значение
э.д.с.
-
максимальное эффективное значение
э.д.с.
Зависимость (4) представляет собой статическую характеристику сельсинов в трансформаторном режиме. Здесь максимальное значение сигнала получается при рассогласовании, равном нулю.
Существенное влияние на эксплуатационные погрешности оказывают изменения частоты и напряжения источника питания и длина линий связи. Основным недостатком контактных сельсинов является: наличие контактных колец и щёток, которые увеличивают момент трения и вследствие этого уменьшают точность передачи показаний. Советскими учёными А.Г.Иосифьеном и Д.В.Свечарником были: разработаны бесконтактные сельсины. На рис.3 показано устройство бесконтактного сельсина.
На статоре бесконтактного сельсина укладываются неподвижные обмотки вторичной трёхфазной цепи, магнитные оси которых взаимно перпендикулярны. Следовательно, обмотка возбуждения, имеющая магнитную ось, направленную вдоль оси ротора сельсина, не оказывает влияния на обмотки вторичной цепи. Для осуществления связи между обмотками первичной и вторичной цепи используется подвижная часть сельсин-ротора, который не имеет обмоток и состоит из двух частей, представляющих набор пластин специальной формы и разделёнными прокладкой из немагнитного материала. Магнитная цепь такого сельсина, как это видно на рис.3, имеет особенность, заключающуюся в том, что магнитный поток этой цепи переходит из плоскости, параллельной магнитной оси обмотки возбуждения, в плоскость перпендикулярную, благодаря чему и осуществляется связь между обмотками первичной и вторичной цепи. При вращении ротора, как и в контактном сельсине, магнитный поток вращается, что создаёт условие наведения Э.Д.С. в обмотках вторичной цепи, по величине зависящей от углового положения ротора.