

Фотоэлектрических датчики положения
Наиболее эффективный метод измерения взаимного положения подвижных кинематических пар, входящих в состав цифровых следящих систем основан на использовании фотоэлектрических (оптических) ДПП. Современные оптические ДПП (ОДП) обеспечивают более высокую разрешающую способность, надежность и точность, чем ПДП и ЭДП тех же размеров. ОДП обладают и другими достоинствами. Так, в отличие от ПДП и ЭДП для них характерна независимость метрологических параметров от нагрузки, а также высокая помехозащищенность.
Основой ОДП является оптическая система, включающая источник света, кодирующий элемент (диск или линейка) и блок фотоприемников. В качестве источников света используются твердотельные оптронные пары и осветители в виде ламп накала с вольфрамовой нитью. Для обеспечения равномерной освещенности области кодирующего элемента применяются коллимационные линзы (коллиматор). Самым ответственным узлом ОДП, в наибольшей степени определяющим его характеристики, является кодирующий диск.
ОДП классифицируются по двум основным признакам.
1. По форме выходного сигнала: накапливающие (преобразователи перемещений) и абсолютные (преобразователи считывания).
2. По способу кодирования: растровые, импульсные и кодовые.
Растровые фотоэлектрические датчики (РОДП) предназначены для преобразования линейных и угловых перемещений в цифровой код на основе использования растрового сопряжения.
Оптический растр представляет собой совокупность однотипных непрозрачных элементов, образующих периодическую структуру и воздействующих на поток лучистой энергии как единое целое. Растр формируется при сопряжении кодирующих элементов датчика. Расположенные на них растровые решетки модулируют световой поток на пути от источника света к приемнику. Конструктивно растровая решетка - это прозрачная пластина, на которую нанесено большое количество непрозрачных штрихов различной формы, обычно равноудаленных и параллельных.
Растры ОДП классифицируются по двум основным признакам:
- по характеру воздействия на лучистый поток;
- по геометрической структуре образующих элементов.
В соответствии с первым признаком различают пропускающие и отражающие растры. Пропускающие растры представляют собой решетку из прозрачных и непрозрачных элементов, отражающие - решетку из элементов, зеркально отражающих свет.
Растровые датчики
Растровое сопряжение получается наложением растровых решеток с малым постоянным зазором между ними (рисунок 3.4). При этом, штрихи одной решетки накладываются на штрихи другой, уменьшая площадь прозрачных участков сопряжения. Один из примеров растрового сопряжения показан на рисунке 3.4.
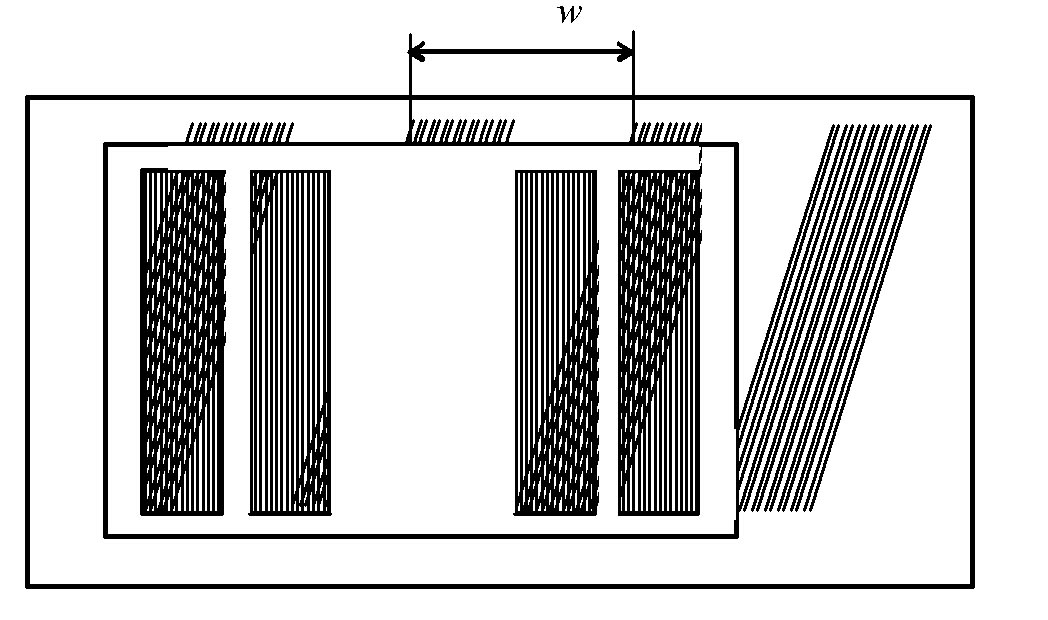
Рисунок 3.4 – Пример растрового сопряжения
В соответствии со вторым признаком различают растры, формируемые параллельными, сеточными, радиальными, кольцевыми и спиральными оптическими структурами. Для измерения линейных перемещений обычно используются сопряжение двух плоских параллельных растров, а для измерения угловых - сопряжение радиальных растров.
На рисунке 3.5 приведены некоторые схемы сочетаний растровых решеток, используемых в фотоэлектрических преобразователях.
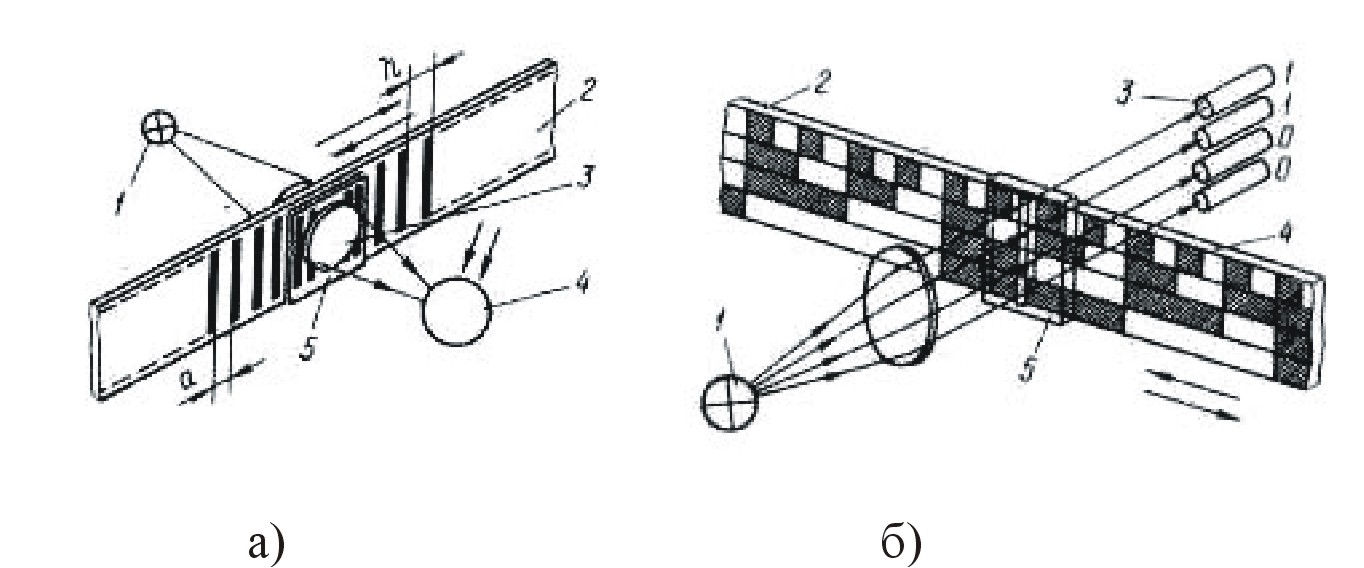
Рисунок 3.5 – Схемы сопряжений элементов в фотоэлектрических преобразователях с решетками
Растровое сопряжение, представленное на рисунке 3.5, а) состоит из подвижного измерительного растра 2, связанного с измерительным наконечником, и индикаторного (сканирующего) растра 5, который закреплен неподвижно. Растры представляют собой стеклянные линейки с равномерно нанесенными штрихами толщиной b и шагом h. Ширина штриха b, как правило, равна ширине зрачка a, т. е. b =a, a h = а+b. Длина измерительного растра должна быть больше диапазона измерения. Индикаторный растр выполняется намного короче с параметрами a,b и h, равными, как правило, измерительному растру. От осветителя 1, через измерительный 2 и индикаторный 5 растры и оптическую систему 3 световой поток направляется на фотоприемник 4. При перемещении измерительного растра относительно индикаторного наблюдается чередование темных и светлых полос, воспринимаемых фотоприемником, на выходе которого формируется сигнал в виде псевдосинусоиды.
В кодирующих соединениях (рисунок 3.5, б) кодовая решетка 2 представляет собой комбинацию светлых и темных участков на различных дорожках 4 кодовой решетки 2. Кодовая шкала наносится на прозрачном материале. От осветителя 1 световой поток направляется через диафрагму 5 и кодовую перемещающуюся решетку 2 на фотоприемник 3. В определенном положении решетки 2 перед щелью диафрагмы оказывается определенное число затемненных и прозрачных участков различных дорожек 4. в двоичной системе счисления, например, непрозрачные участки соответствуют числу 0, прозрачные участки — числу 1. При этом для получения n-разрядного числа необходимо иметь п кодовых дорожек. Тогда наибольшее число выходных сигналов с фотоприемников равно 2n - 1. На рисунке 3.5, б) представлено четыре дорожки. Каждая дорожка младшего разряда имеет шаг, в два раза меньший по сравнению с предыдущим разрядом.
Лекция 4. Принципы измерение динамических факторов
План лекции:
- Общие сведения об измерителях динамических величин;
- Измерения массы;
- Измерение деформации и давления;
Общие сведения об измерителях динамических величин
К датчикам динамических величин (ДДВ) относятся информационные устройства, преобразующие изменение динамических факторов (силы, ускорения и давления) в изменение электрического сигнала.
Датчики этого типа весьма распространены в различных системах контроля и диагностики. Характерными задачами являются контроль параметров натяжения всевозможных лент и полос в бумажной промышленности и металлургии, измерение сил на валках клетей прокатных станов, предохранение от перегрузок в подъемных механизмах и транспортных средствах, наконец, контроль весовых и инерционных характеристик различных объектов. Использование ДДВ в системах управления и робототехнике позволяет регулировать момент на валу привода или ускорение выходного вала и реализовывать сложные законы управления звеньями исполнительного механизма.
Динамометрическая аппаратура по принципу действия может быть подразделена на три основные группы:
1. Приборы, основанные на уравновешивании измеряемой силы силой тяжести.
2. Приборы, основанные на измерении деформаций.
3. Приборы, основанные на измерении давления.
Приборы, основанные на уравновешивании измеряемой силы известной силой тяжести, представляют собой рычажную систему, при помощи которой измеряемая сила уравновешивается гирями. На этом принципе основаны весы, образцовые рычажные динамометры и силоизмерители испытательных машин. Эти приборы имеют следующие преимущества: высокую точность и чувствительность, хорошую стабильность характеристик во времени при минимальных регламентных работах, отсутствие перемещений, или очень малые перемещения точки приложения силы, малую зависимость показаний от температуры, большой диапазон измерений.
Динамометрические приборы, основанные на измерении деформаций, состоят из упругого звена, воспринимающего силу, и устройств, преобразующих деформации упругого звена, пропорциональные действующей силе, в показания прибора. Эти приборы – наиболее распространенные средства измерения сил. Развитие проволочных, полупроводниковых и индуктивных преобразователей делает их еще более универсальными. Тип преобразователя оказывает решающее влияние на тип упругого звена. По виду преобразователей динамометры с упругим звеном могут быть подразделены на следующее основные группы:
- с визуальным отсчетом и механическими преобразователями;
- с потенциометрическими преобразователями;
- с индуктивными преобразователями;
- с проволочными и полупроводниковыми преобразователями;
- основанные на принципе пьезоэффекта;
- виброчастотные и др.
В динамометрах, основанных на измерении давления, сила передается на поршень, находящийся в цилиндре с жидкостью, а измерительным элементом является датчик давления, динамометры на пьезокерамических материалах и др.
Из приведенного выше становится очевидно, что такая величина как сила измеряется косвенными методами т.е. сила вначале преобразуется в перемещение или изгиб с помощью упругого звена, а затем уже эта величина преобразуется в электрический сигнал.