

2.4. Пассивные связи и лишние степени свободы
В некоторых
механизмах имеются звенья, наличие
которых не влияет на подвижность
механизма, они налагают пассивные или
избыточные условия связи. Такие звенья
называются пассивными.
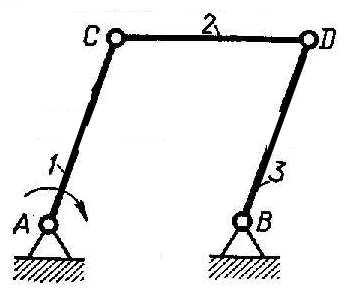
Примером механизма с пассивными
условиями связи является механизм
параллельных кривошипов (рис. 2.4). Степень
подвижности этого механизма
![]() ,
но фактически она будет составлять
,
но фактически она будет составлять
![]() .
В данном случае звено 4
(EF)
налагает избыточные пассивные условия
связи и их можно исключить, при этом
степень подвижности механизма не
изменится.
.
В данном случае звено 4
(EF)
налагает избыточные пассивные условия
связи и их можно исключить, при этом
степень подвижности механизма не
изменится.

а б
Рис. 2.4. Механизм с пассивными условиями связи:
Механизм с пассивной связью ef – ;
Механизм без пассивной связи – .
В механизмах пассивные звенья вводят для увеличения жесткости, лучшего распределения нагрузки и т.д.
В кулачковом
механизме, изображенном на рис. 2.5,
степень подвижности равна
![]() ,
где количество подвижных звеньев n
=3, количество кинематических пар 5 класса
p5
=3 – А (1, 0), B
(2, 0) C(2,
3); количество кинематических пар 4 класса
p4
=1 – D
(1, 3).
Здесь
вторую подвижность
вносит
ролик 3. Если
ролик затормозить, то характер движения
коромысла
2 не
измениться. Следовательно, степень
свободы, вносимая роликом 3 является
“лишней”. При заторможенном ролике
степень подвижности равна
,
где количество подвижных звеньев n
=3, количество кинематических пар 5 класса
p5
=3 – А (1, 0), B
(2, 0) C(2,
3); количество кинематических пар 4 класса
p4
=1 – D
(1, 3).
Здесь
вторую подвижность
вносит
ролик 3. Если
ролик затормозить, то характер движения
коромысла
2 не
измениться. Следовательно, степень
свободы, вносимая роликом 3 является
“лишней”. При заторможенном ролике
степень подвижности равна
![]() ,
где количество подвижных звеньев n
=2, количество кинематических пар 5 класса
p5
=2 – А (1, 0), B
(2, 0); количество кинематических пар 4
класса p4
=1 – D
(1, 3).
,
где количество подвижных звеньев n
=2, количество кинематических пар 5 класса
p5
=2 – А (1, 0), B
(2, 0); количество кинематических пар 4
класса p4
=1 – D
(1, 3).
Звенья, создающие лишние степени свободы, используют в механизме для улучшения условий работы, повышения КПД (замена трения скольжения трением качения) и т.д. При структурном анализе пассивные звенья и лишние степени свободы условно исключают.
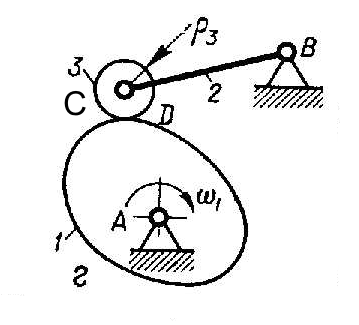
Рис. 2.5. Кинематическая схема кулачкового механизма
2.5. Классификация механизмов
В основу современной классификации механизмов положена классификация, разработанная И.И. Артоболевским. В соответствие с этой классификацией механизмы объединяются в классы от первого и выше по структурным признакам. Механизм первого класса – исходный механизм, состоит из ведущего звена и стойки (рис. 2.6), которые соединены кинематической парой пятого класса. Механизмы второго, третьего т.е. более высоких классов, образуются последовательным соединением к исходному механизму кинематических цепей, у которых степень подвижности равна нулю.

Рис. 2.6. Исходный механизм (механизм 1 класса)
2.6. Структурные группы
Структурной
группой
называется кинематическая цепь, которая,
будучи присоединенной свободными
элементами пар к неподвижной стойке,
обладает нулевой степенью подвижности,
![]() .
Положим, что в состав структурной группы
входят кинематические пары только 5
класса, тогда формула Чебышева будет
записана в виде
.
Положим, что в состав структурной группы
входят кинематические пары только 5
класса, тогда формула Чебышева будет
записана в виде
![]() ,
откуда
,
откуда
![]() ,
,
из этой формулы следует, что структурная группа может состоят из двух звеньев (n=2) и трех кинематических пар (p5=3); четырех звеньев (n=4) и шести кинематических пар (p5=6) и т.д.
Структурные группы делятся на классы в зависимости от класса контура. Контуром называют замкнутую область части плоскости, занятой звеном или ограниченной со всех сторон звеньями. Класс контура определяется числом внутренних кинематических пар, входящих в этот контур. Рассмотрим контур структурной группы, показанной на рис. 2.7. а). Этот контур второго класса, поскольку плоскость, занятая звеном (например, АВ рис.2.7 б) и в)) имеет две внутренних кинематических пары – А и В. Структурная группа, показанная на рис. 2.7 г), имеет наибольший контур FВС с тремя кинематическими парами, поэтому этот контур третьего класса. На рис. 2.7 д) структурная группа имеет три контура: АВС – контур третьего класса, FDE – контур третьего класса, CBDF – контур четвертого класса, поэтому это группа 4 класса.

Рис. 2.7. Контуры различных классов
Наиболее распространенными являются группы второго класса. В состав группы второго класса входят два звена и три пары пятого класса (рис. 2.8).
Вид структурной группы второго класса назначается от числа и взаимного расположения вращательных и поступательных пар в ней. Структурная группа 2ого класса, 1ого вида имеет три вращательные пары (В-В-В), 2ого вида имеет две вращательные пары и одну крайнюю пару поступательную (В-В-П), 3ого вида имеет две вращательные пары и одну среднюю пару поступательную (В-П-В).
Класс механизма определяется по высшему классу группы, которая входит в его состав. Для определения класса механизма необходимо выделить из него структурные группы, начиная от наиболее удаленных от ведущего звена.

Рис. 2.8. Наиболее распространенные структурные группы 2 класса