

Лекция 8. Исследование процессов в нелинейных системах методом фазовой плоскости. Скользящие процессы в релейных системах.
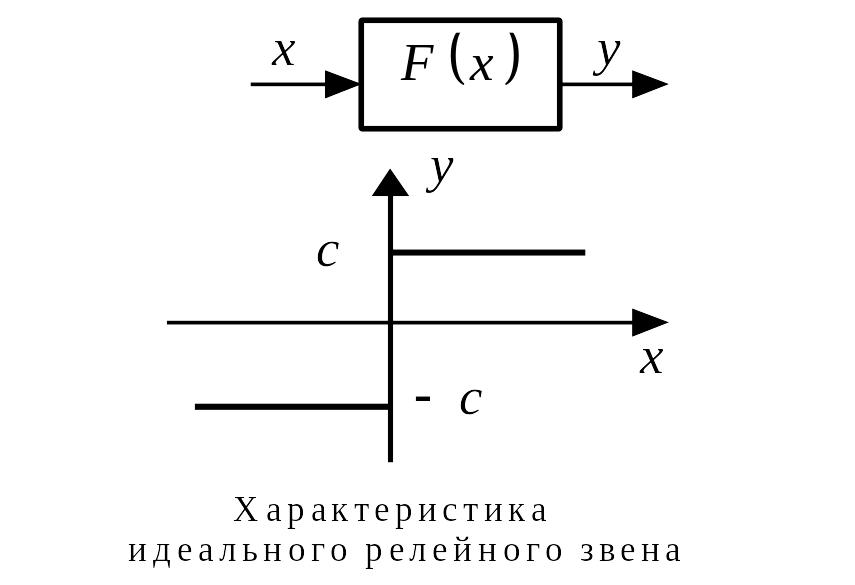
Рассмотрим систему автоматического управления, в качестве нелинейного элемента которой используется звено с идеальной релейной характеристикой.
Структурная схема исследуемой системы показана на рисунке
Задача.
Провести качественный анализ процессов
в системе управления методом фазовой
плоскости при
![]() (исследовать собственные движения
системы).
(исследовать собственные движения
системы).
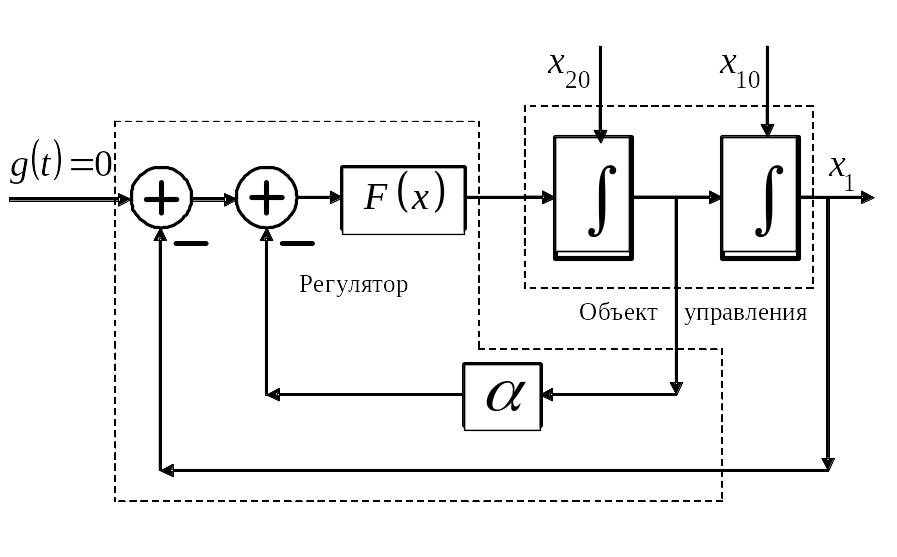
Решение. По заданной структурной схеме составим математическую модель исследуемой системы в виде системы дифференциальных уравнений
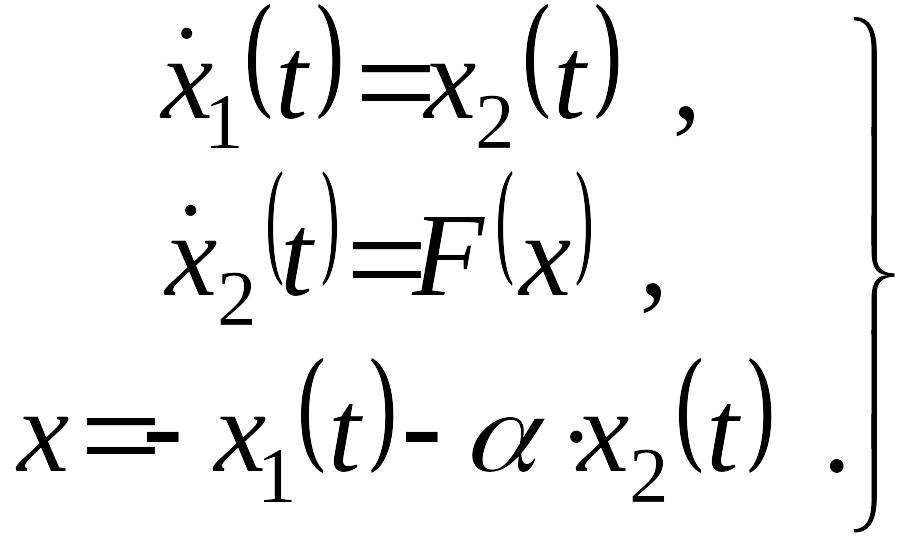 (1)
(1)
Преобразуем математическую модель исследуемой системы с учетом свойств релейной характеристики (нечетная функция своего аргумента)
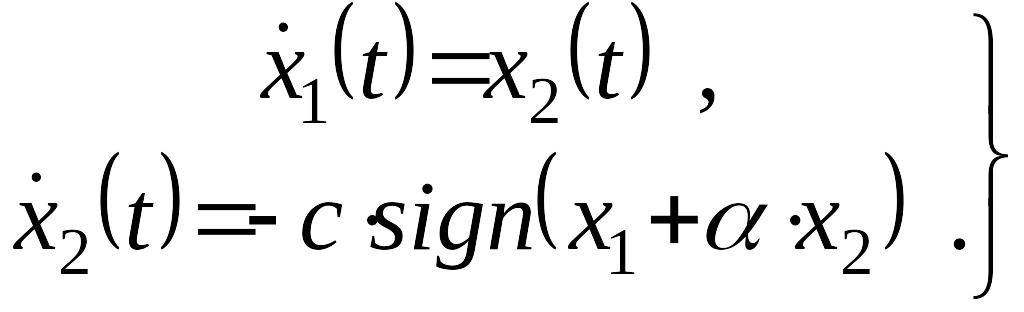 (2)
(2)
Движение
системы происходит только за счет
наличия ненулевых начальных условий.
В уравнениях (2) физический смысл
переменных состояния:
![]() – выходная переменная системы,
– выходная переменная системы,
![]() – скорость изменения выходной переменной
системы. Из уравнений (2) получим
дифференциальное уравнение фазовых
траекторий системы
– скорость изменения выходной переменной
системы. Из уравнений (2) получим
дифференциальное уравнение фазовых
траекторий системы
 .
(3)
.
(3)
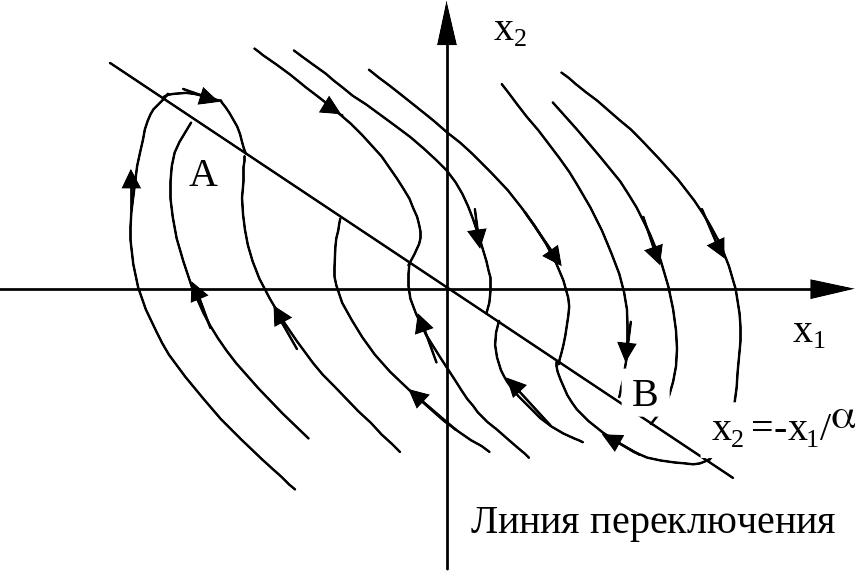
Линия переключения реле на фазовой плоскости задается уравнением
![]() ,
,
 . (4)
. (4)
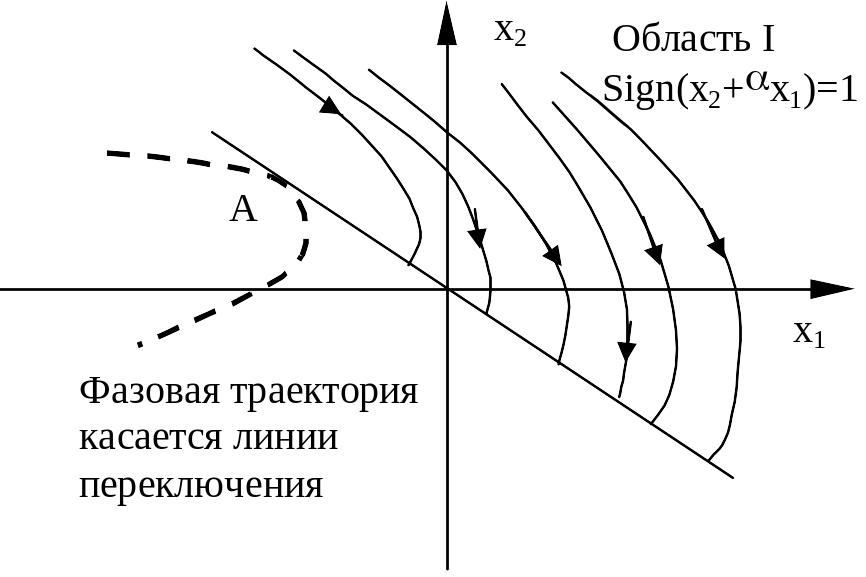
Справа
от линии переключения (область I)
будет выполняться неравенство
![]() .
Слева от линии переключения (область
II)
будет выполняться неравенство
.
Слева от линии переключения (область
II)
будет выполняться неравенство
![]() .
.
Получим уравнения фазовых траекторий в каждой из этих областей.
Область 1. В этой области , следовательно, уравнение (3) принимает вид
 ,
(5)
,
(5)
это дифференциальное уравнение с разделяющимися переменными. Выполним интегрирование дифференциального уравнения (5)
![]() ,
,
 ,
,
![]() ,
(6)
,
(6)
Уравнение
(6) – это уравнение фазовых траекторий
системы в области 1. Уравнение (6) – это
уравнение парабол, вершины которых
находятся на оси
![]() фазовой плоскости, а ветви парабол
направлены влево. Параболы изображены
на рисунке справа от линии переключения.
Направление движения изображающей
точки по этим фазовым траекториям: в
верхней полуплоскости – движение слева
направо (
фазовой плоскости, а ветви парабол
направлены влево. Параболы изображены
на рисунке справа от линии переключения.
Направление движения изображающей
точки по этим фазовым траекториям: в
верхней полуплоскости – движение слева
направо (![]() );
в нижней полуплоскости – справа налево
(
);
в нижней полуплоскости – справа налево
(![]() ).
).
Область
II.
В области II
![]() .
Следовательно, уравнение (3) принимает
вид
.
Следовательно, уравнение (3) принимает
вид
 .
(7)
.
(7)
Уравнение (7) – это дифференциальное уравнение фазовых траекторий исследуемой системы слева от линии переключения. Интегрирование дифференциального уравнения (7) дает
![]() .
(8)
.
(8)
Уравнение (8) – это уравнение фазовых траекторий системы левее линии переключения (в области II). Уравнение(8) – это уравнение парабол, вершины которых находятся на оси , а ветви парабол направлены вправо. Направление движения изображающей точки: в верхней полуплоскости – справа налево ( ); в нижней полуплоскости - справа налево ( ).

«Сшивая» оба листа по линии переключения получим фазовый портрет исследуемой системы.
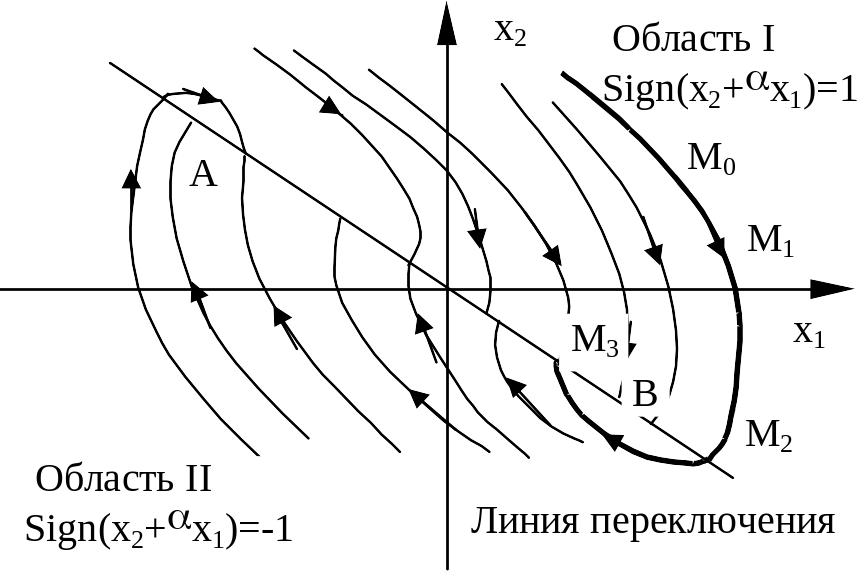
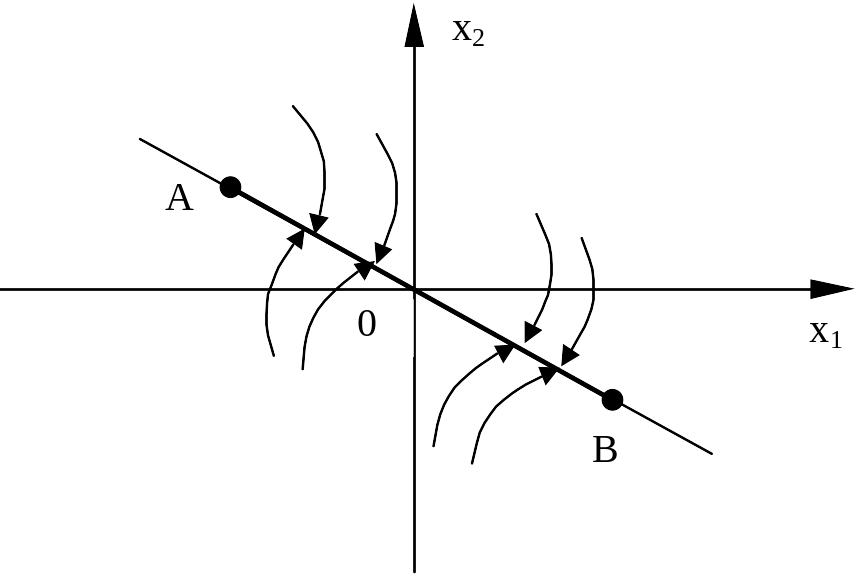
Из полученных формул и фазового портрета исследуемой системы можно сделать следующие выводы.
Вывод 1. Фазовая плоскость исследуемой системы разбивается на две области границей которых является прямая
– линия переключения релейного элемента системы.
Вывод
2. На линии
переключения можно выделить три
характерных участка, разграниченных
точками
и
![]() линии переключения, точками касания
фазовых траекторий (парабол) линии
переключения. За пределами отрезка
линии переключения, точками касания
фазовых траекторий (парабол) линии
переключения. За пределами отрезка
![]() фазовая траектория по одну сторону
линии переключения после перехода через
нее является продолжением траектории
по другую сторону линии переключения.
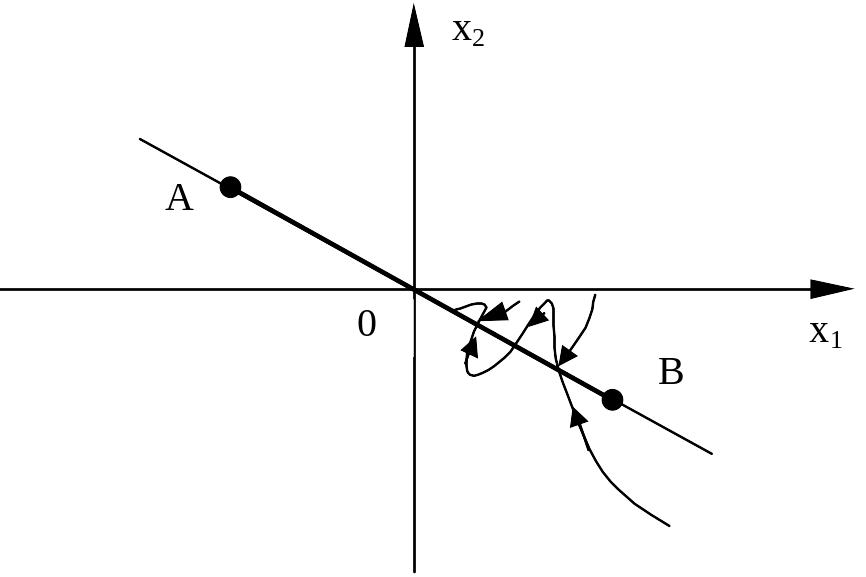
Внутри отрезка
фазовые траектории подходят к линии
переключения с двух сторон, встречаясь
на нем.
фазовая траектория по одну сторону
линии переключения после перехода через
нее является продолжением траектории
по другую сторону линии переключения.
Внутри отрезка
фазовые траектории подходят к линии
переключения с двух сторон, встречаясь
на нем.
Попав на отрезок , изображающая точка уже не сможет сойти с него, но и не сможет остаться на нем. Скорость движения на не определена, но специальные исследования показывают, что она конечна. Изображающая точка будет скользить по отрезку к началу координат – точке равновесия похожего на устойчивый узел. Отрезок называют отрезком скольжения.