

Лекция 6. Построение фазовых портретов нелинейных систем управления по уравнениям первого приближения.
Рассмотрим нелинейную систему автоматического управления, динамика которой описывается уравнениями
, (1)
где
функции
и
![]() полагаем аналитическими во всех точках
фазовой плоскости.
полагаем аналитическими во всех точках
фазовой плоскости.
Определим точки, характеризующие состояние равновесия, как решение системы нелинейных уравнений
(2)
относительно двух неизвестных и . Обозначим одно из решений уравнений (2) через и . В общем случае система уравнений (2) может иметь не одно, а несколько решений. Исследуем характер фазовых траекторий в окрестности этого состояния равновесия. Для этого с помощью замены переменных
, ,
,
перенесем начало координат в особую точку с координатами (см. рисунок).
По формуле Тейлора функции и в окрестности особой точки представим в виде
,
(3)
,
где , - содержат все члены разложения функции и по формуле Тейлора, у которых степени и выше первой. Поэтому в окрестности особой точки слагаемыми и можно пренебречь.
Тогда с учетом равенств (2) и (3) и полагая
, ,
, .
получим уравнения первого приближения для системы (1) вида
. (4)
Это линейная однородная система дифференциальных уравнений с постоянными коэффициентами, которая описывает динамику системы в окрестности состояния равновесия.
С помощью системы уравнений (4) можно выполнить построение фазового портрета нелинейной системы. Возможность построения фазового портрета нелинейной системы по уравнениям первого приближения проиллюстрируем следующим примером.
Лекция 7. Исследование процессов в нелинейных системах методом фазовой плоскости. Реле с гистерезисом и зоной нечувствительности.
Рассмотрим систему автоматического управления, в качестве нелинейного элемента которой используется звено с релейной характеристикой общего вида (реле с зоной нечувствительности и гистерезисом). Характеристика реле с зоной нечувствительности и гистерезисом
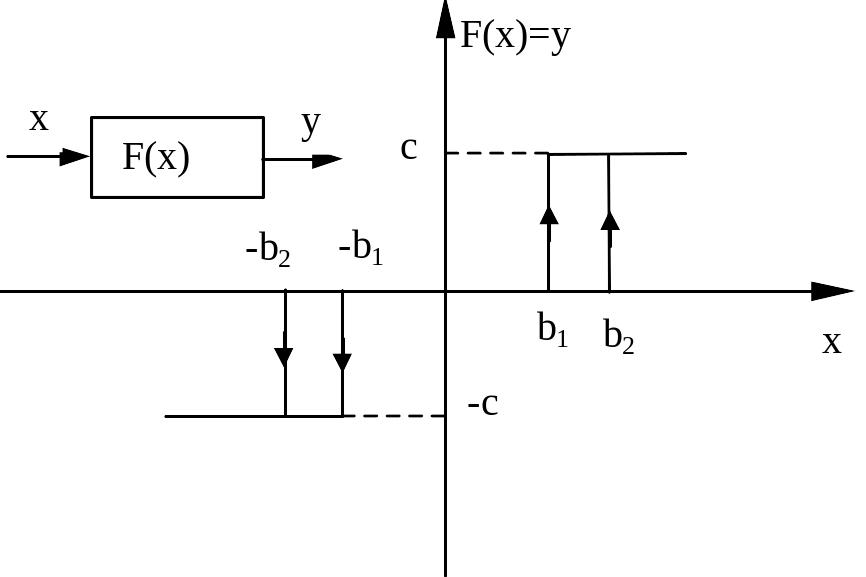
Характеристика
нелинейного звена является нечетной
функцией, то есть
![]() .
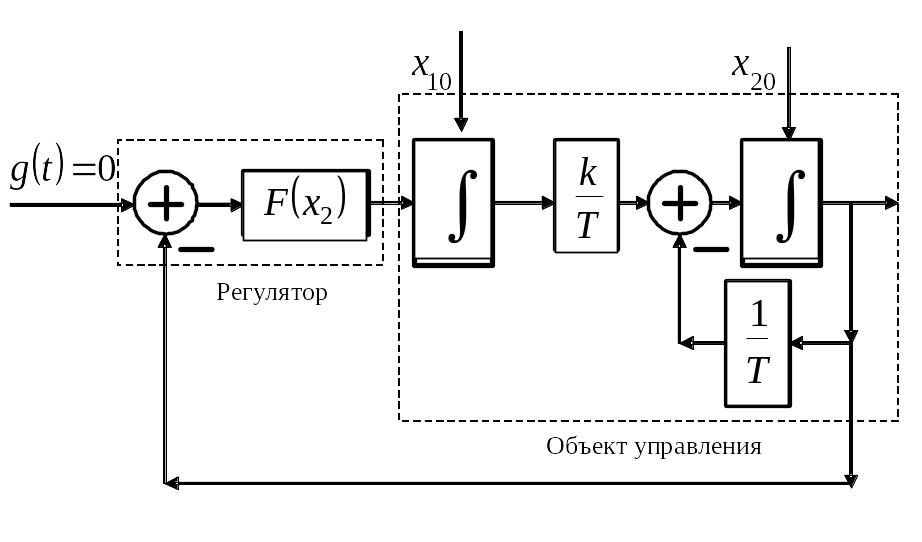
Структурная схема исследуемой системы
показана на рисунке
.
Структурная схема исследуемой системы
показана на рисунке
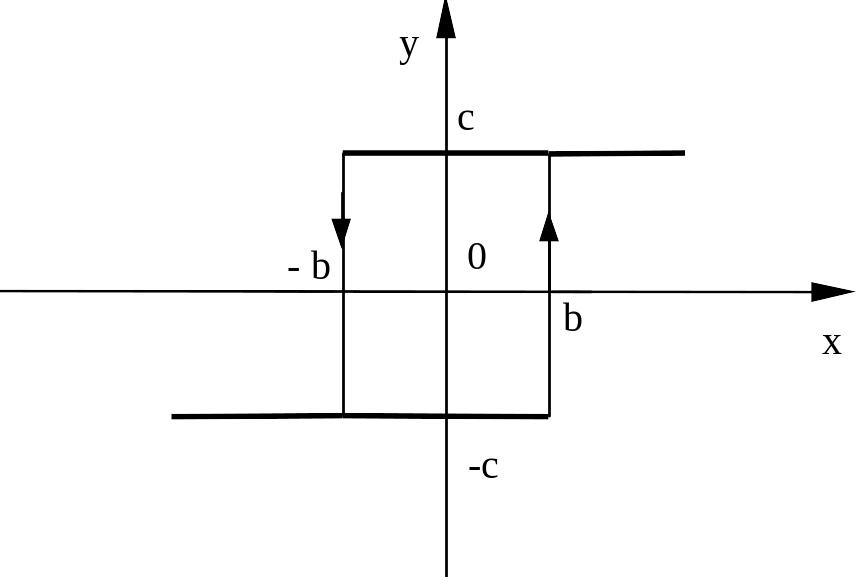
Исследование процессов в нелинейных системах методом фазовой плоскости. Реле с гистерезисом.
Рассмотрим систему автоматического управления, в качестве нелинейного элемента которой используется звено с нелинейной характеристикой, вид которой показан на рисунке
Структурная схема исследуемой системы показана на рисунке.
Задача
состоит в том, чтобы провести качественный
анализ процессов в системе управления
методом фазовой плоскости при
![]() (исследуются собственные движения
системы).
(исследуются собственные движения
системы).
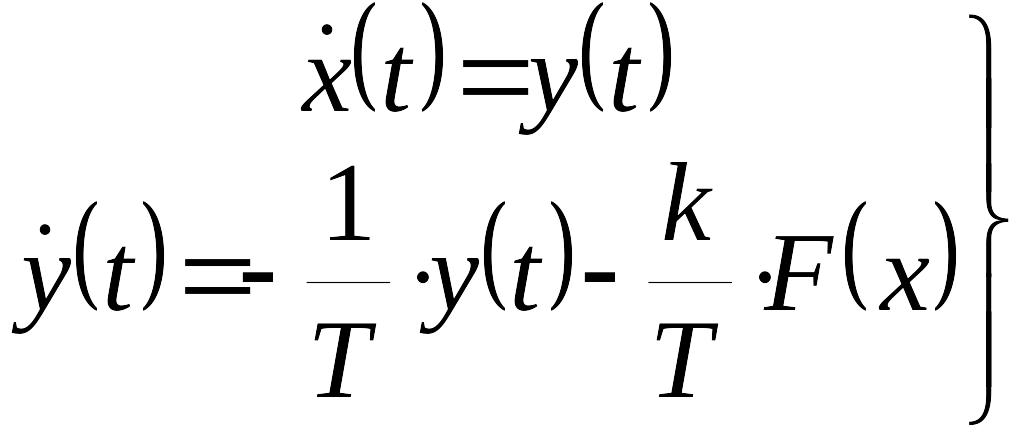
РЕШЕНИЕ. Согласно заданной структурной схеме математической моделью процессов в исследуемой системе являются следующие уравнения
 ,
(1)
,
(1)
![]() .
(2)
.
(2)
Уравнение (2) записано с учетом свойства нечетности заданной характеристики.
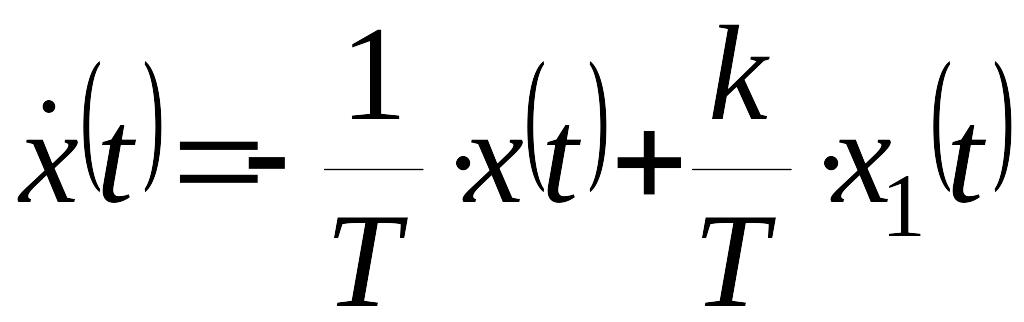
Для того чтобы упростить аналитические выкладки, выполним преобразование исходной математической модели (1) и (2) системы управления. С этой целью выполним дифференцирование уравнения (1) по времени, а затем подставим в него уравнение (2). В результате чего получаем
![]() ,
(3)
,
(3)
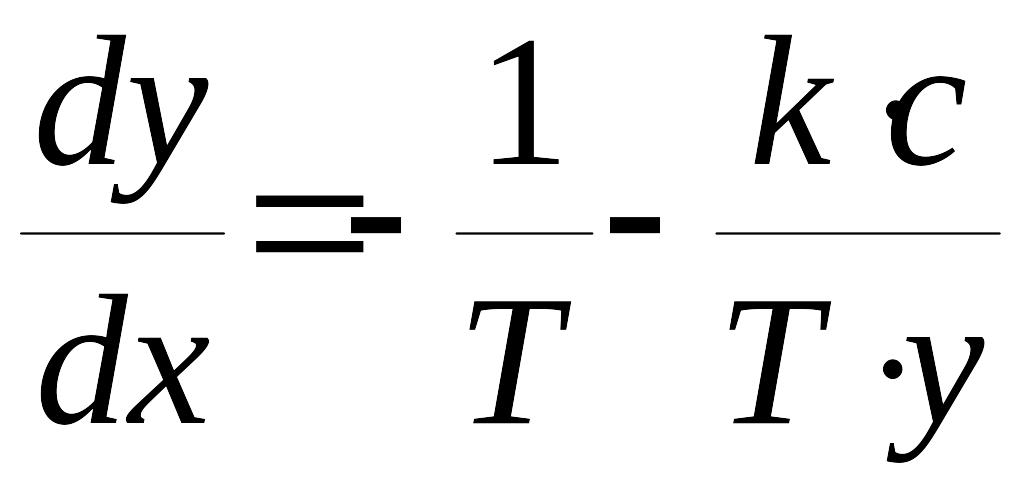
Уравнение (3) запишем относительно переменных состояния в следующем виде
 ,
(4)
,
(4)
В
системе уравнений (4) обозначено:
![]() – выходная переменная системы,
– выходная переменная системы,
![]() – скорость изменения выходной переменной.
– скорость изменения выходной переменной.
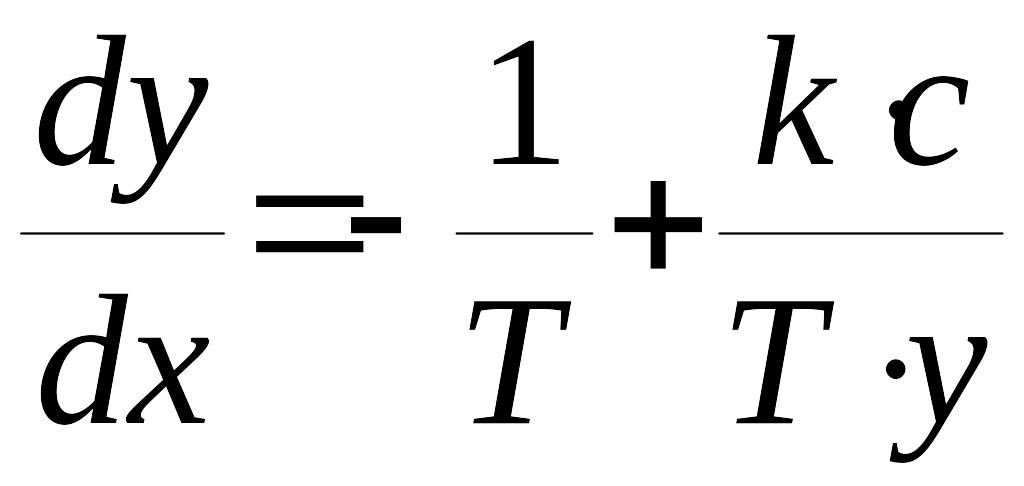
Из системы уравнений (4) получим дифференциальное уравнение фазовых траекторий, поделив второе уравнение системы (4) на первое
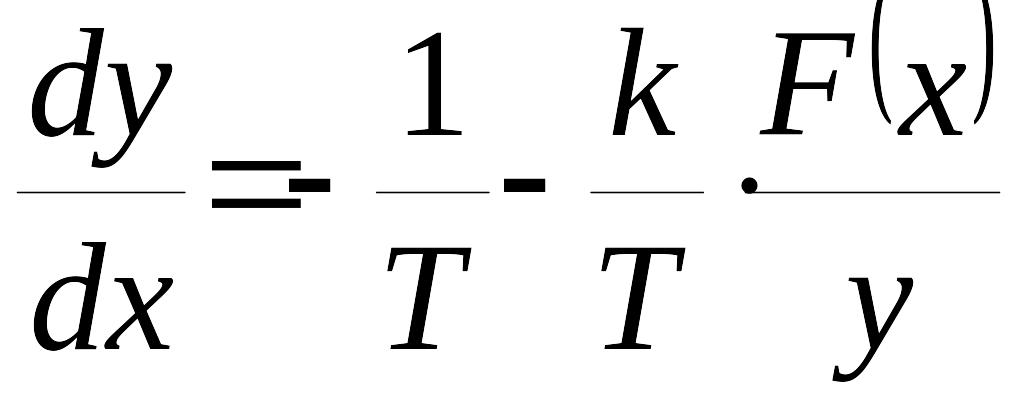 .
(5)
.
(5)
Математическую модель заданного нелинейного элемента можно представить в виде следующей системы уравнений
Если
![]() ,
то
,
то
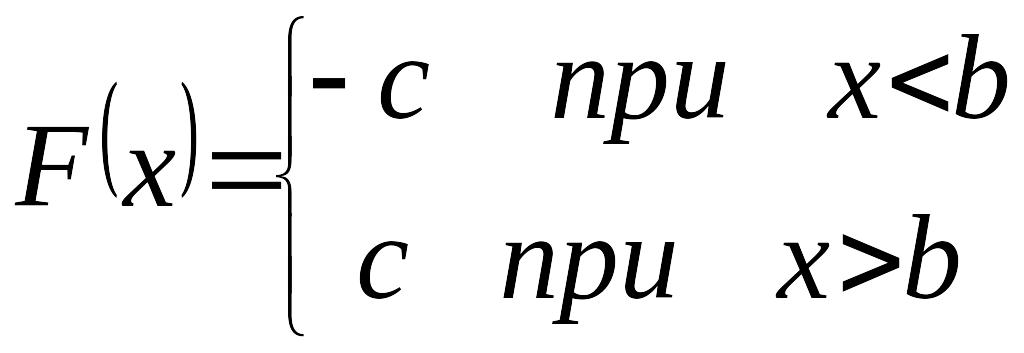 ,
(6)
,
(6)
если
![]() ,
то
,
то
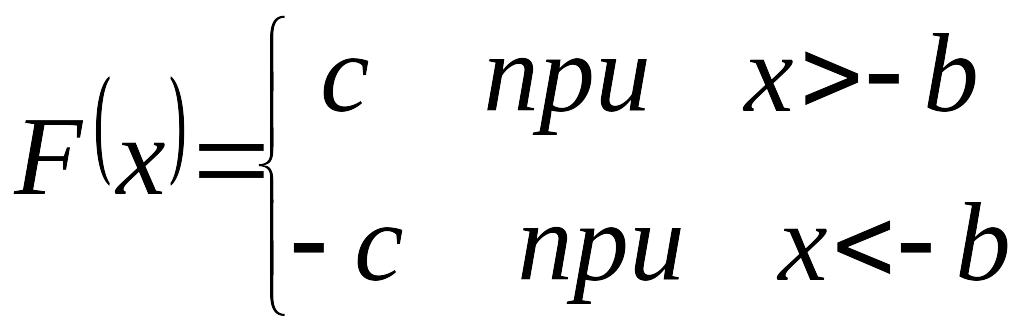 .
(7)
.
(7)
Уравнения (6) и (7) определяют линию переключения (на рисунках пунктирные линии), которая разделяет фазовую плоскость на две области:
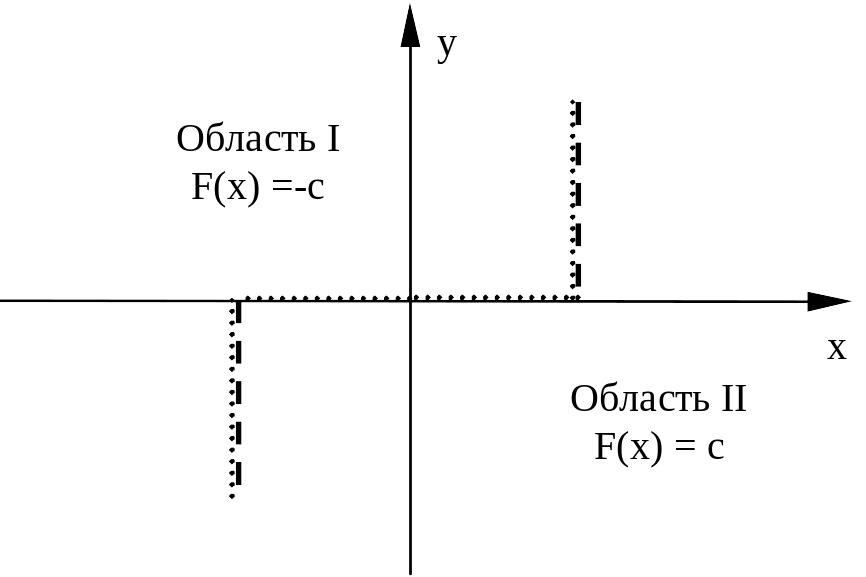
область
I,
где
![]() ,
область II,
где
,
область II,
где
![]() .
.
ОБЛАСТЬ I. В области I , следовательно уравнение (5) принимает вид
 ,
(8)
,
(8)
Выполним интегрирование уравнения (8), которое является дифференциальным уравнением с разделяющимися переменными
 ,
,
 ,
,
 .
.
Вычислим интеграл, стоящий в правой части последнего равенства
 .
.
Таким образом, в области I фазовые траектории определяются уравнением
![]() ,
(9)
,
(9)
где
![]() – постоянная интегрирования, которая
определяется начальными условиями
таким образом, чтобы начальная точка
фазовой траектории находилась в области
I.
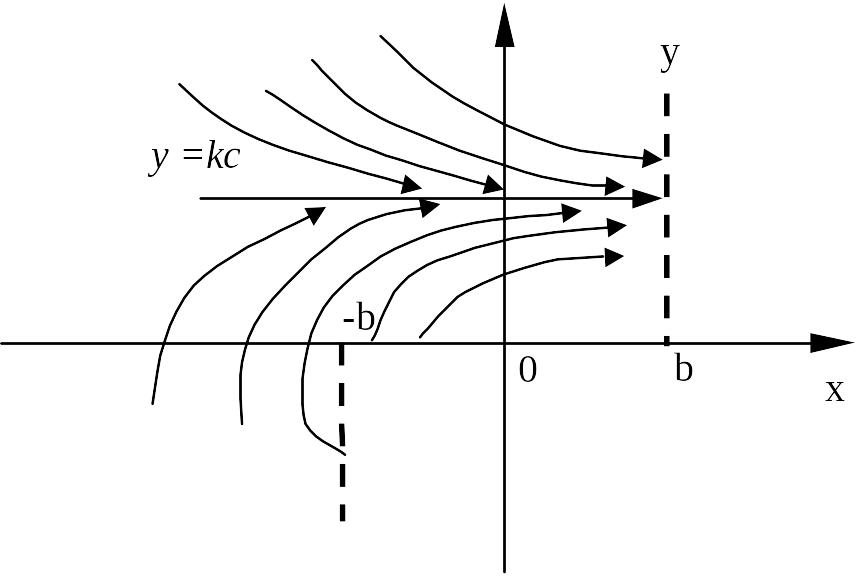
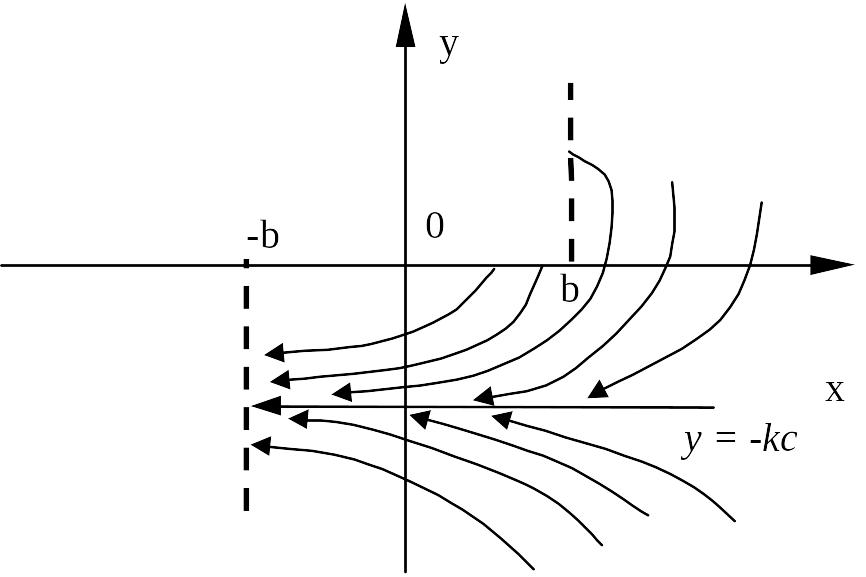
Из уравнения (9) следует, что фазовые
траектории имеют асимптоту
– постоянная интегрирования, которая
определяется начальными условиями
таким образом, чтобы начальная точка
фазовой траектории находилась в области
I.
Из уравнения (9) следует, что фазовые
траектории имеют асимптоту
![]() ,
(10)
,
(10)
Движение
изображающей точки по фазовым траекториям
в верхней полуплоскости происходит
слева направо, т.к.
![]() ;
в нижней полуплоскости справа налево,
т.к.
;
в нижней полуплоскости справа налево,
т.к.
![]() .
На рисунке изображены фазовые траектории
системы для области I.
Напомним, что для этой области
.
На рисунке изображены фазовые траектории
системы для области I.
Напомним, что для этой области
![]() .
.
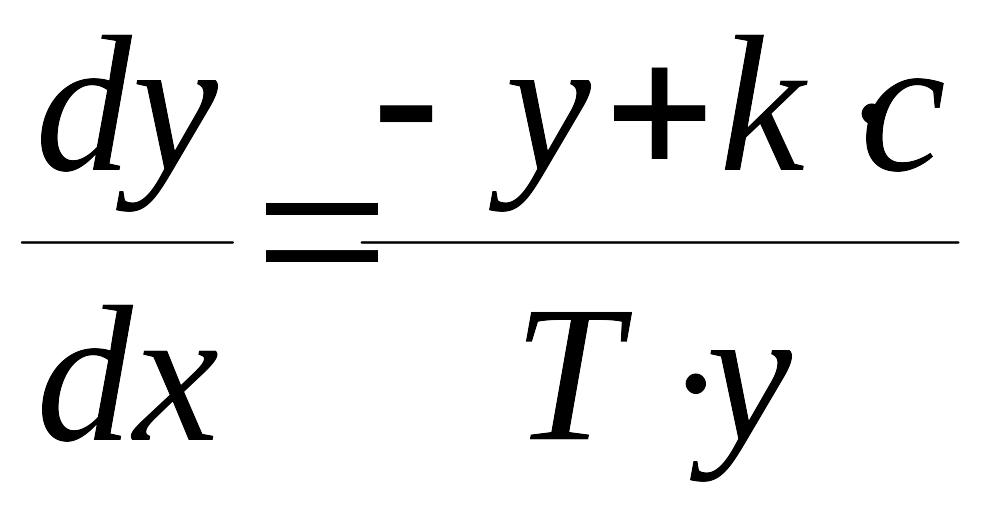
ОБЛАСТЬ II. В области II и, следовательно, уравнение (5) принимает вид
 ,
(11)
,
(11)
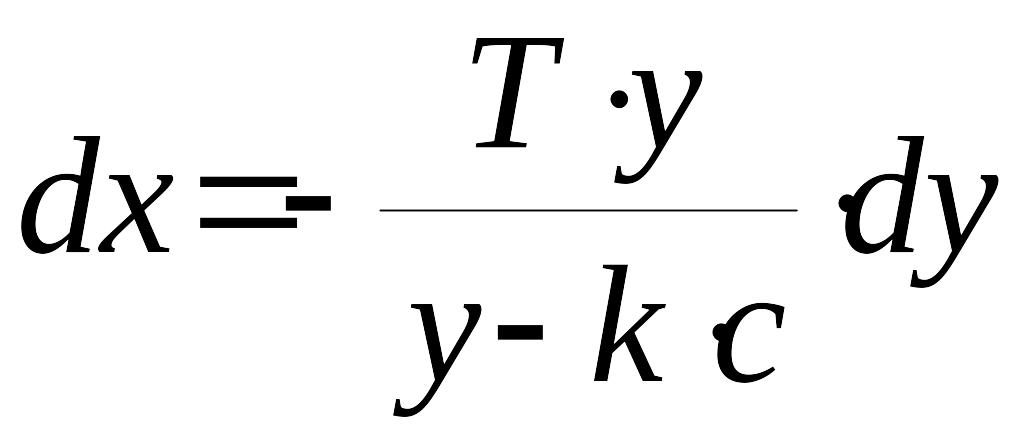
Уравнение (11) – это дифференциальное уравнение фазовых траекторий во второй области. Выполним интегрирование уравнения (11)
 ,
,
 ,
,
 ,
,
 ,
,
![]() .
.
Таким образом, уравнение фазовых траекторий в области II будет иметь вид
![]() ,
(12)
,
(12)
где
![]() – постоянная интегрирования, которая
определяется начальными условиями,
таким образом, чтобы начальная точка
фазовой траектории находилась в области
II.
– постоянная интегрирования, которая
определяется начальными условиями,
таким образом, чтобы начальная точка
фазовой траектории находилась в области
II.
Как следует из (12) фазовые траектории имеют асимптоту
![]() ,
(13)
,
(13)
Движение
изображающей точки по фазовым траекториям
во второй области в верхней полуплоскости
происходит слева направо, т.к.
![]() ;
в нижней полуплоскости справа налево,
т.к.
.
На рисунке изображены фазовые траектории
системы для области II.
Напомним, что для этой области
;
в нижней полуплоскости справа налево,
т.к.
.
На рисунке изображены фазовые траектории
системы для области II.
Напомним, что для этой области
![]() .
.
«Сшивая» фазовые портреты для этих двух областей по линии переключения получим фазовый портрет исследуемой системы. Анализ фазовых траекторий показывает, что фазовые траектории начинаясь из произвольной точки фазовой плоскости сходятся к некоторой замкнутой кривой – образуют сходящиеся спирали. На фазовой плоскости есть предельный цикл, следовательно, в системе есть автоколебания
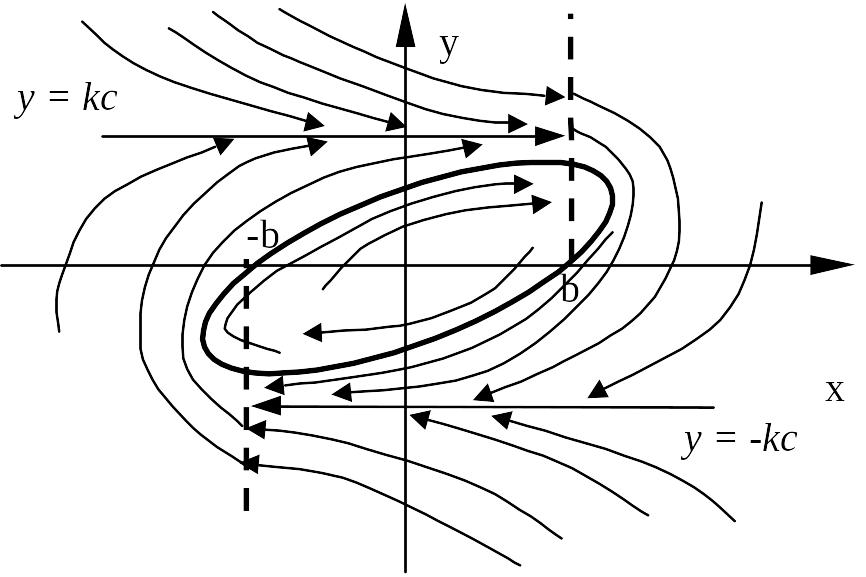
.
В рассматриваемом примере, если начальные условия таковы, что изображающая точка находится внутри предельного цикла, то процесс в системе будет иметь вид
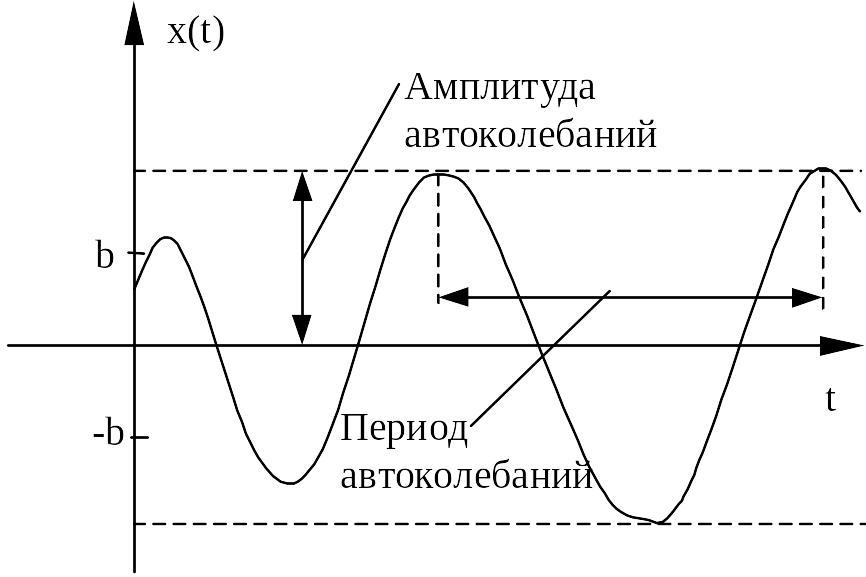
Если начальные условия на фазовой плоскости лежат вне предельного цикла, то процесс будет иметь вид
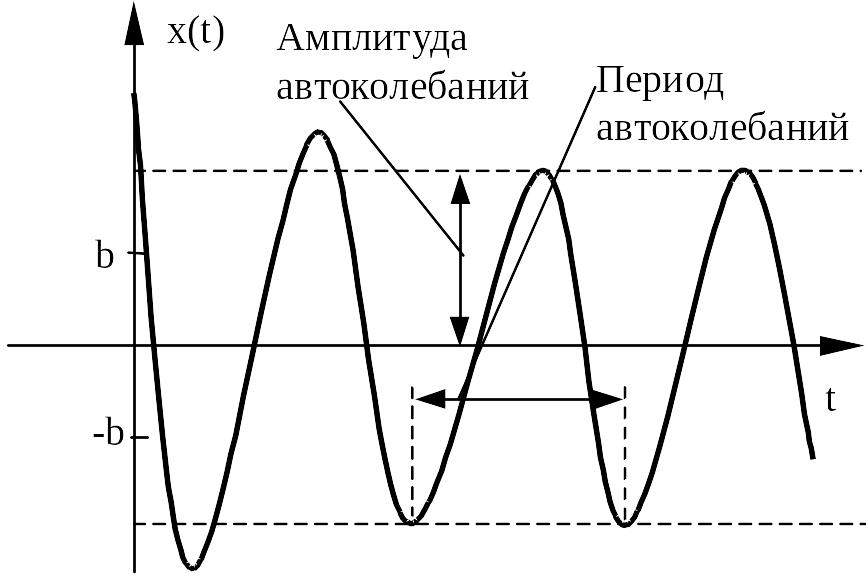
Автоколебания происходят около петли гистерезиса с амплитудой несколько превышающей величину .