

Лекция 5. Линеаризация уравнений систем автоматического управления. Уравнения первого приближения.
Рассмотрим нелинейную систему автоматического управления, динамика которой описывается уравнениями
 ,
(1)
,
(1)
где
функции
![]() и
и
![]() являются аналитическими во всех точках
фазовой плоскости.
являются аналитическими во всех точках
фазовой плоскости.
Определим на фазовой плоскости координаты точек, являющихся состояниями равновесия. Координаты этих точек являются решением системы нелинейных уравнений
 .
(2)
.
(2)
Обозначим
одно из решений системы (2) через
![]() ,
,
![]() .
В общем случае система уравнений (2)
может иметь несколько решений. Исследуем
динамику системы (1) в некоторой окрестности
этого состояния равновесия. Для этого,
с помощью замены переменных
.
В общем случае система уравнений (2)
может иметь несколько решений. Исследуем
динамику системы (1) в некоторой окрестности
этого состояния равновесия. Для этого,
с помощью замены переменных
![]() ,
,
![]() ,
,
![]() ,
,
![]()
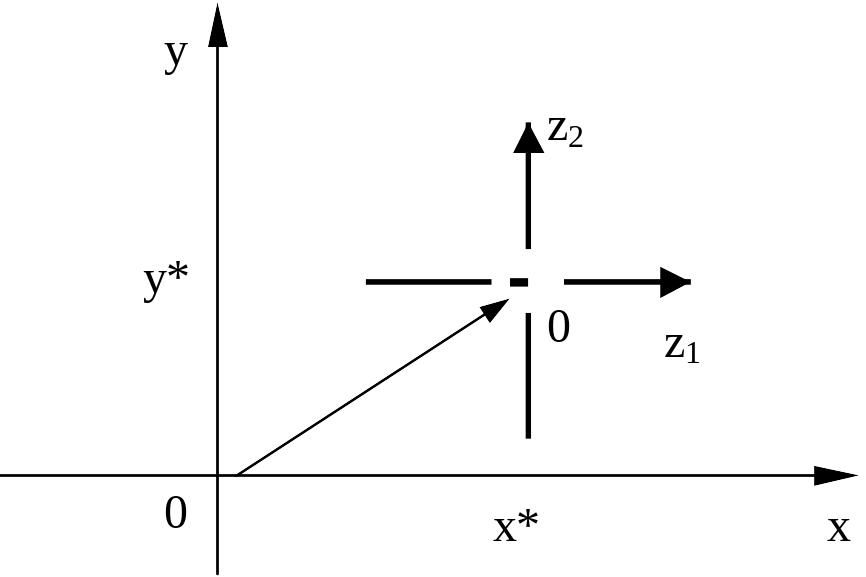
перенесем
начало координат фазовой плоскости в
особую точку с координатами
![]() (см. рисунок).
(см. рисунок).
По формуле Тейлора функции и в окрестности особой точки представим в виде
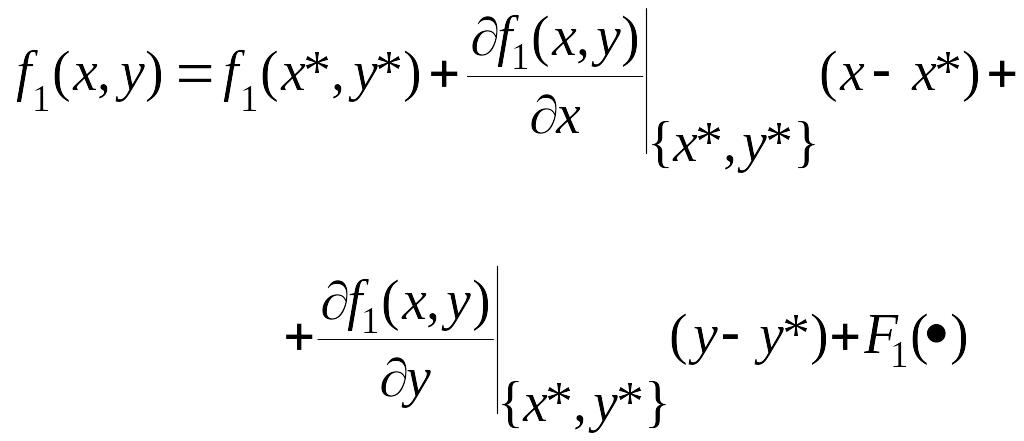 ,
,
 ,
,
где
![]() ,
,
![]() - содержат все члены разложения функции
и
по формуле Тейлора, у которых степени
- содержат все члены разложения функции
и
по формуле Тейлора, у которых степени
![]() и
и
![]() выше первой. Поэтому в окрестности
особой точки
слагаемыми
и
можно пренебречь. Далее поступают
следующим образом.
выше первой. Поэтому в окрестности
особой точки
слагаемыми
и
можно пренебречь. Далее поступают
следующим образом.
1.
Вычисляют значения частных производных
функций
и
в точке
,
значения которых обозначают соответственно
как
![]() ,
,
![]() ,
,
![]() ,
,
то есть
,
,
то есть
 ,
,
 ,
,
 ,
,
 .
.
Тогда
 (3)
(3)
2. Так как и , то
 (4)
(4)
, . (5)
3. Осуществляют подстановку равенств (3) и (4), (5) в уравнения (1):
 .
(6)
.
(6)
Так как в особой точке справедливо и , то окончательно получаем
 .
(7)
.
(7)
Система уравнений (7) является линейной системой дифференциальных уравнений с постоянными коэффициентами. Система уравнений (7) описывает динамику системы (1) в некоторой окрестности особой точки , в окрестности состояния равновесия системы.
Система уравнений (7) называется системой уравнений первого приближения. Динамика системы уравнения в окрестности особой точки с достаточной степенью точности описывается системой линейных уравнений (7) – уравнениями первого приближения.
Фазовые траектории нелинейных систем автоматического управления.
В случае линейных систем автоматического управления характер (тип) особой точки определяет движение системы при любых отклонениях от состояния равновесия. Для нелинейных систем характер особой точки определяет поведение фазовых траекторий лишь в некоторой малой окрестности особой точки. При рассмотрении поведения фазовых траекторий нелинейных систем на всей фазовой плоскости весьма важную роль играют особые траектории.
Различают три основных типа особых траекторий:
Особые точки (состояние равновесия). Типы особых точек рассмотрены выше.
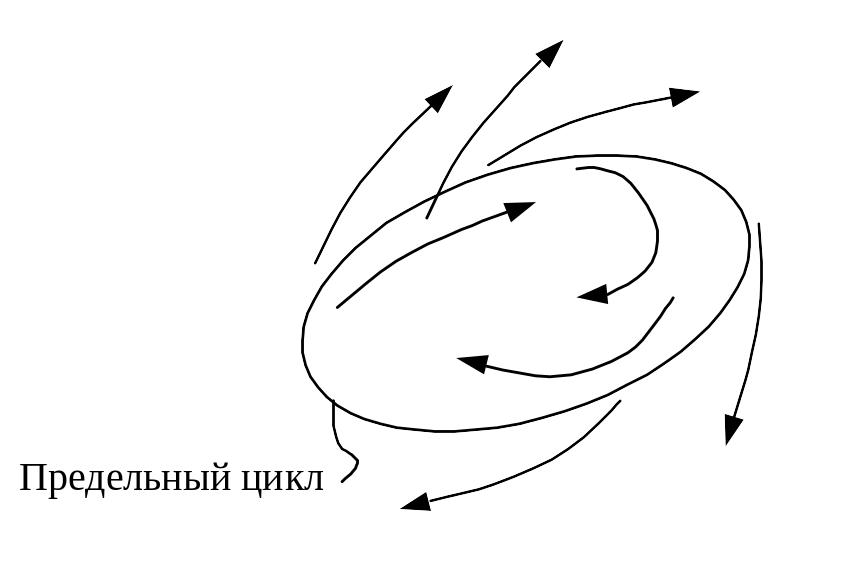
Изолированные замкнутые траектории. Изолированность замкнутой траектории означает, что в достаточно малой ее окрестности нет других замкнутых траекторий. Изолированные замкнутые траектории называются предельным циклами. Предельным циклом на фазовой плоскости соответствуют периодические движения системы.
Предельный
цикл называется устойчивым, если
существует такая
–окрестность этого цикла, что все
фазовые траектории, начинающиеся в
–окрестности, асимптотически при
![]() приближаются к предельному циклу (см.
рисунок).
приближаются к предельному циклу (см.
рисунок).
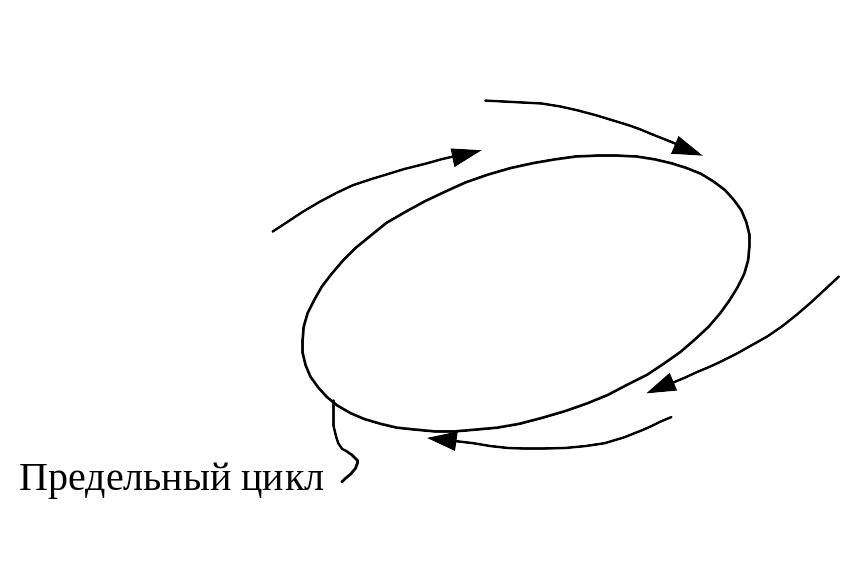
Устойчивым предельным циклам в системе автоматического управления соответствуют автоколебания. Характерная черта автоколебаний – локальная независимость их параметров от начальных условий.
Если в любой, сколь угодно малой окрестности предельного цикла существует хотя бы одна фазовая траектория, не приближающаяся к предельному циклу при , то предельный цикл называется неустойчивым (см рисунок).
Сепаратрисы. Сепаратрисы разделяют фазовую плоскость на области с фазовыми траекториями различных типов. В окрестности особой точки типа «седло» сепаратрисы – являются асимптотами. Точки равновесия, предельные циклы и сепаратрисы являются особыми траекториями. Таких траекторий обычно имеется конечное число на фазовой плоскости. Определив эти особые траектории, мы тем самым находим все качественные особенности фазовых траекторий на плоскости, все виды и особенности процессов в нелинейных системах. Особые траектории разбивают всю фазовую плоскость на ряд областей; характер движения в каждой из этих плоскостей часто бывает нетрудно определить, зная характер устойчивости точек равновесия и предельных циклов. Так получается полная качественная характеристика всех возможных типов движений системы.
Особые траектории разбивают фазовую плоскость на ряд областей. Характер движения в каждой из этих областей нетрудно определить, если известен характер особых точек и определена устойчивость предельных циклов. Таким образом, можно получить качественную картину всевозможных движений динамических систем.