

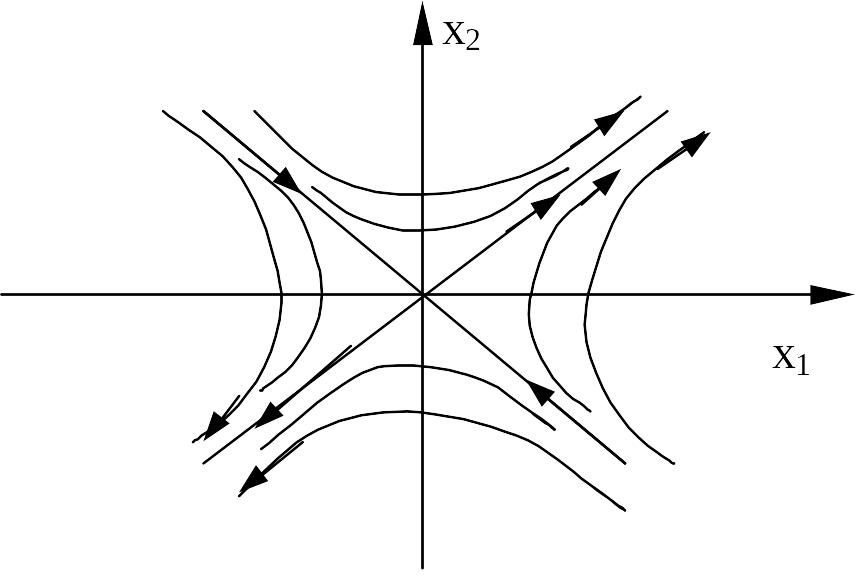
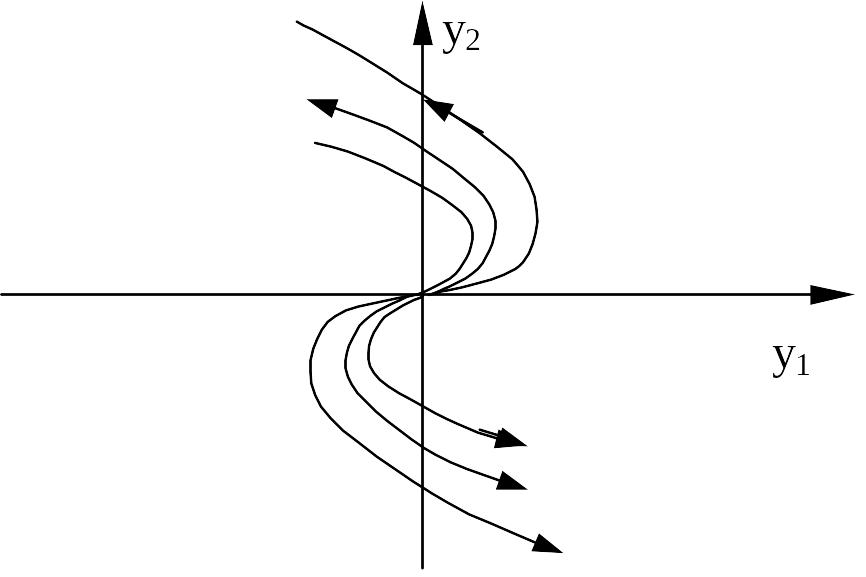
Случай 4 Корни характеристического уравнения действительны и разных знаков (седло)
Рассмотрим линейное дифференциальное уравнение
, (1)
начальные
условия заданы
,
![]() .
.
Характеристическое уравнение, соответствующее дифференциальному уравнению (1) имеет вид
![]() ,
(2)
,
(2)
его корни, определяемые равенством
, (3)
являются
действительными и имеют разные знаки
(![]() ).
).
Решение уравнения (1) аналогично предыдущему случаю имеет вид
 .
(4)
.
(4)
Аналогично
предыдущему случаю получаем, что фазовыми
траекториями являются прямые
![]() и
и
![]() y,
где числа
y,
где числа
![]() и
и
![]() определяются как решение квадратного
уравнения
определяются как решение квадратного
уравнения
![]() .
(5)
.
(5)
Но так как и разных знаков, то эти прямые находятся в разных квадрантах фазовой плоскости.
Так
как корни различны, действительны и
имеют разные знаки, то справедливо
![]() ,
,
![]() .
Это значит, что процессы в системе
расходящиеся, система неустойчива.
Фазовые траектории в данном случае
имеют вид
.
Это значит, что процессы в системе
расходящиеся, система неустойчива.
Фазовые траектории в данном случае
имеют вид
Для исходной системы уравнений уравнения асимптот
,
 ,
,
 ,
,
 ,
,
![]() ,
,
![]() .
.
Случай 5 Корни характеристического уравнения равны кратные (вырожденный узел ). Рассмотрим систему
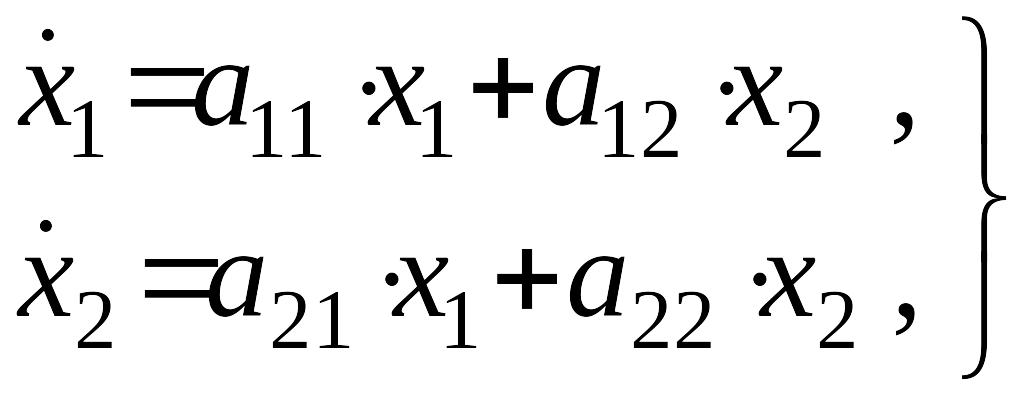 .
.
Матрица динамики системы
.
Характеристическое уравнение системы
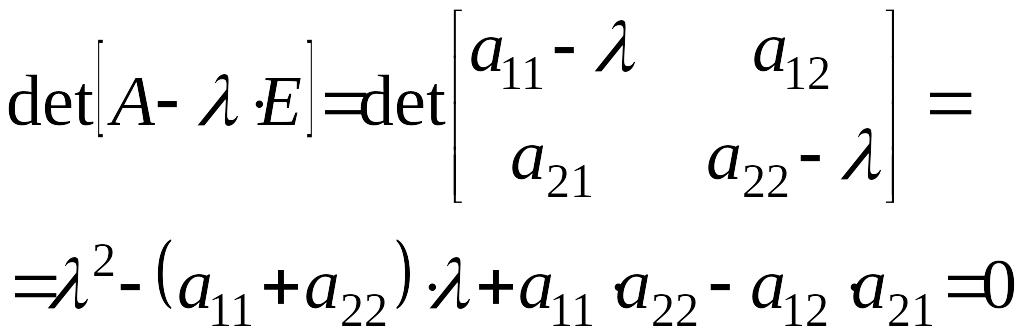 .
.
Так
как корни характеристического уравнения:
,
то существует такая невырожденная
матрица
линейного преобразования
,
которое приводит исходную систему
![]() к виду
к виду
![]() ,
где в данном случае матрица
,
где в данном случае матрица
![]() имеет вид
имеет вид
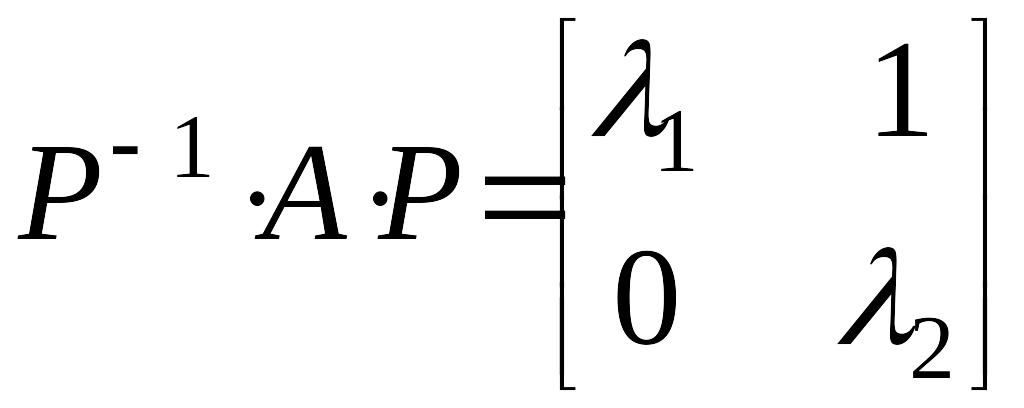 .
.
Тогда относительно переменных и можно записать следующую систему дифференциальных уравнений в виде
 .
(*)
.
(*)
Решение системы будет
 (**)
(**)
Система
уравнений (*) не изменится при одновременной
замене
на
![]() и
на
и
на
![]() ,
поэтому фазовые траектории будут
симметричны относительно начала
координат. Таким образом, достаточно
изучить поведение фазовых траекторий
только в верхней полуплоскости (
,
поэтому фазовые траектории будут
симметричны относительно начала
координат. Таким образом, достаточно
изучить поведение фазовых траекторий
только в верхней полуплоскости (![]() ).
).
В нижней полуплоскости фазовые траектории будут симметричны относительно начала координат.
Положительная и отрицательная полуоси являются фазовыми траекториями.
Для того чтобы получить уравнения фазовых траекторий исключим из уравнений (**) время.
 ,
,
 ,
,
 ,
,
Если , то устойчивый вырожденный узел
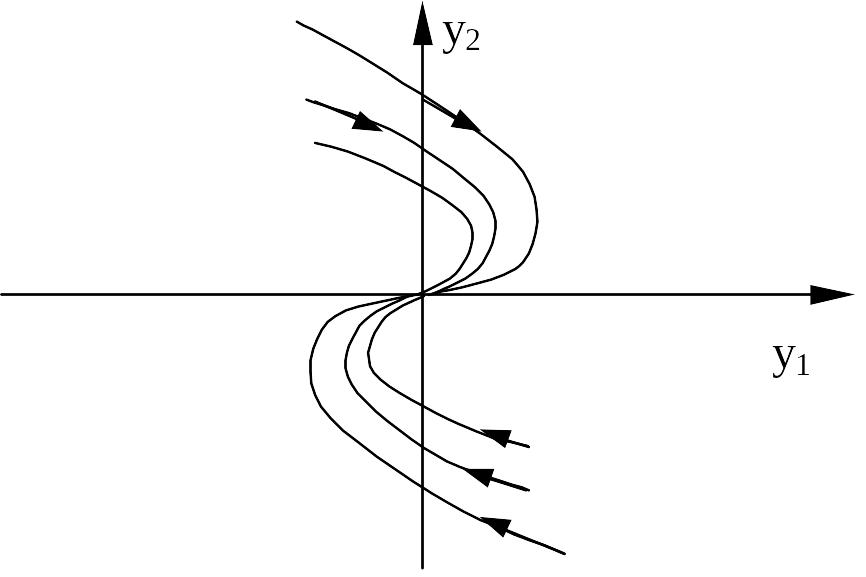
Если , то не устойчивый вырожденный узел
Вывод. Если корни характеристического уравнения соответствующего линейному дифференциальному уравнению кратны, то особая точка называется вырожденным узлом, при этом, если , то вырожденный узел устойчивый, если же , то вырожденный узел не устойчивый.