

Задание к срсп №5 Тема: Дуобинарное упражнение
Соберите систему:
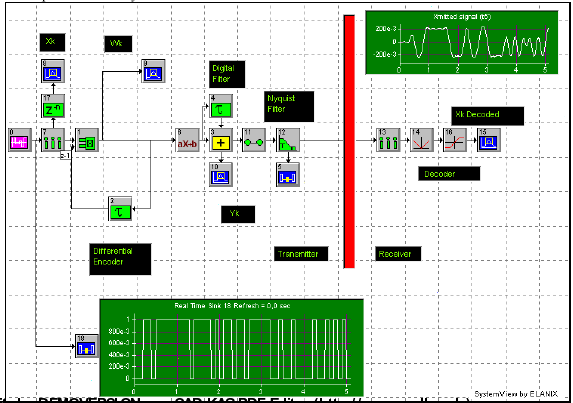
Рисунок
File name: Duobinary_ru.svu
Title: Duobinary.svu
System Time:0 - 5,11e+0 sec, dT=1,0e-2 sec, Sample Rate=1,00e+2 Hz,
Samples=512, Loops=1
Token Attribute Type Parameters
0 Source PN Seq Amp = 500e-3 v, Offset = 500e-3 v, Rate = 10 Hz, Levels =
2, Phase = 0 deg, Max Rate = 100 Hz
1 Operator XOR Threshold = 500e-3, True = 0, False = 1, Max Rate = 10
Hz
2 Operator Delay Non-Interpolating, Delay = 100e-3 sec, = 1,0 smp, Output 0
= Delay , Output 1 = Delay - dT t1 , Max Rate (Port 1) = 10 Hz
3 Adder - - - -
4 Operator Delay Non-Interpolating, Delay = 100e-3 sec, = 1,0 smp, Output 0
= Delay t3 , Output 1 = Delay - dT , Max Rate (Port 0) = 10 Hz
5 Sink Real Time Input from t12 Output Port 0, Max Input Rate = 100 Hz
6 Function Poly -1+(2x), Max Rate = 10 Hz
7 Operator Sampler Non-Interp Right, Rate = 10 Hz, Aperture = 0 sec,
Aperture Jitter = 0 sec, Max Rate = 10 Hz
8 Sink Analysis Input from t17 Output Port 0, Max Input Rate = 10 Hz
9 Sink Analysis Input from t1 Output Port 0, Max Input Rate = 10 Hz
10 Sink Analysis Input from t3 Output Port 0, Max Input Rate = 10 Hz
11 Operator Hold Zero, Gain = 1, Out Rate = 100 Hz, Max Rate = 100 Hz
12 Operator Linear Sys Comm Sin(t)/t FIR, Symbol Rate = 10 Hz, Decimate
By 1, Quant Bits = None, Taps = 81, Init Cndtn = 0, DSP Mode Disabled, Max
Rate = 100 Hz
13 Operator Sampler Non-Interp Right, Rate = 10 Hz, Aperture = 0 sec,
Aperture Jitter = 0 sec, Max Rate = 10 Hz
14 Function Rectify Zero Point = 0 v, Max Rate = 10 Hz
15 Sink Analysis Input from t16 Output Port 0, Max Input Rate = 10 Hz
16 Function Limiter Max Input = ±0 v, Max Output = ±1 v, Max Rate = 10 Hz
17 Operator Smpl Delay Delay = 4 samples, = 400e-3 sec, Attribute = Passive,
Initial Condition = 0 v, Fill Last Register, Output 0 = Delay t8 , Output 1 = Delay
- dT , Max Rate (Port 0) = 10 Hz
18 Sink Real Time Input from t0 Output Port 0, Max Input Rate = 100 Hz
Предварительное кодирование
Предварительное кодирование выполняется посредством первоначального дифференциального кодирования бинарной последовательности {хк} в новую бинарную последовательность {wk}, для чего используется выражение
![]()
где символ «» представляет сложение двоичных цифр по модулю 2 (эквивалентно операции исключающего ИЛИ). Сложение по модулю 2 имеет следующие правила.

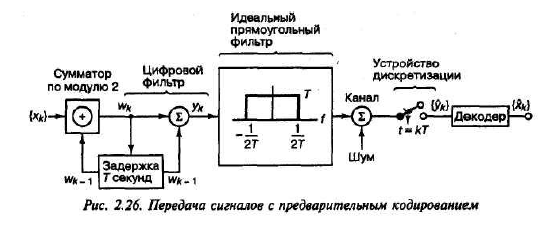
Затем двоичная последовательность {wt} преобразовывается в последовательность биполярных импульсов, и операция кодирования проходит так же, как было показано в примере 2.4. В то же время, как показано ниже, в примере 2.5 при выполнении предварительного кодирования процесс обнаружения отличается от обнаружения в обычной двубинарной схеме. Схема предварительного кодирования показана на рис. 2.26; стоит обратить внимание на то, что сложение по модулю 2, дающее предварительно кодированную последовательность {wk}, выполняется над двоичными цифрами, а цифровая фильтрация, результатом которой является
последовательность {ук}, — над биполярными импульсами.
Пример 2.5. Двубинарное предварительное кодирование
Проиллюстрируем правила двубинарного кодирования и декодирования при использовании предварительного дифференциального кодирования, определенного формулой (2.30). Будем использовать ту же последовательность {хк}, что и в примере 2.4.
Решение
Последовательность двоичных цифр 0 0 1 0 1 1 0
{хк}
Предварительно кодированная 0 0 1 1 0 1 1
последовательность wk = хк Ф wk-1
Биполярная последовательность {wk} -1 -1 +1 +1 -1 +1 +1
Правило кодирования: ук = wk + wk-1 -2 0 +2 0 0 +2
Правило декодирования: Если y’k = 2 , то x’k = двоичный
нуль
Если у’k = 0, то х’k = двоичная единица
Декодированная бинарная
последовательность {хк} 0 1 0 1 1 0
Предварительное дифференциальное кодирование позволяет
декодировать последовательность {у’} путем принятия решения по каждой принятой выборке отдельно, не обращаясь к предыдущим, которые могут быть ошибочными. Преимущество заключается в том, что при возникновении из-за помех ошибочной цифры ошибка не будет распространяться на другие цифры. Отметим, что первый бит двоичной последовательности {wk}, подвергаемой дифференциальному кодированию, выбирается произвольно. Если бы начальный бит последовательности {wk} был выбран равным 1, а не 0, результат декодирования был бы таким же.

Это упражнение осуществляет предварительное кодирование двубинарной
системы как описано выше
a) Запустите схему с упражнением
b) Поработайте над декодером символов, чтобы проверить критерии
принятия того или иного решения задачи.
Проверьте данные, начиная с Xk до входа фильтра Найквиста.