

Контрольные вопросы к защите
См. все вопросы к работам № 1–4.
Что такое переоборудование?
В чем отличие непрерывной и цифровой систем управления?
В чем преимущества цифровых систем управления?
Что такое аналоговые и дискретные сигналы?
Что такое дискретная передаточная функция?
Что такое импульсный элемент? Моделью какого реального устройства он служит?
Что такое экстраполятор? Моделью какого реального устройства он служит?
Что такое фиксатор нулевого порядка? Почему более сложные экстраполяторы применяются редко?
Что такое цифровой фильтр?
Какой оператор используется для построения дискретной передаточной функции цифрового фильтра?
Как найти дискретную передаточную функцию фильтра, заданного разностным уравнением?
Какие методы переоборудования вы знаете? Какой из них наиболее точный?
Как выполнить переоборудование методом Эйлера?
Какая функция Matlab выполняет преобразование Тастина? Как ее вызывать?
В чем недостаток методов переоборудования на основе формул численного интегрирования Симпсона и Уэддля?
Почему для переоборудования ПД-регулятора использовано преобразование Тастина, а для интегральной части – метод Эйлера?
Что такое алгебраический цикл? В каком случае алгебраических циклов не возникает?
Какие эффекты наблюдаются при увеличении интервала квантования?
Как обосновать выбор интервала квантования при переоборудовании непрерывного регулятора?
4. Практические занятия Практическое занятие 1. Разработка алгоритма исследования линейных систем автоматического управления методом фазовой плоскости.
По структурной схеме системы автоматического управления получить передаточную функцию системы.
Записать характеристическое уравнение системы автоматического управления.
Решить характеристическое уравнение и определить тип особой точки.
Составить математическую модель системы автоматического управления в форме системы дифференциальных уравнений.
Установить, есть ли среди фазовых траекторий траектории, являющиеся прямыми линиями
Выполнить преобразование дифференциальных уравнений системы автоматического управления к канонической форме записи и получить уравнение фазовых траекторий.
Построить фазовый портрет системы автоматического управления.
Пример. Структурная схема системы автоматического управления имеет вид, показанный на рисунке
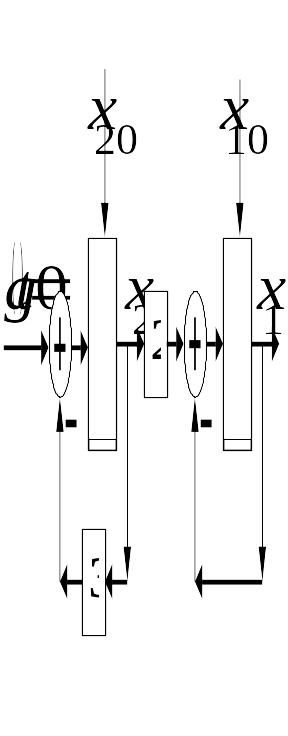
Определить тип особой точки системы. Составить уравнение фазовых траекторий.
РЕШЕНИЕ. Уравнения динамики системы
![]() ,
,
![]() .
.
Матрица динамики системы
 .
.
Характеристический полином системы:
 .
.
Корни
характеристического полинома
![]() ,
,
![]() .
.
Особая точка устойчивый узел.
Для того, чтобы получить уравнения фазовых траекторий, преобразуем исходную схему к канонической форме записи. Корни характеристического уравнения действительны и различны. Следовательно, матрица динамики исходной системы преобразуется к диагональной. Найдем соответствующую матрицу преобразования. Имеем
 ,
,
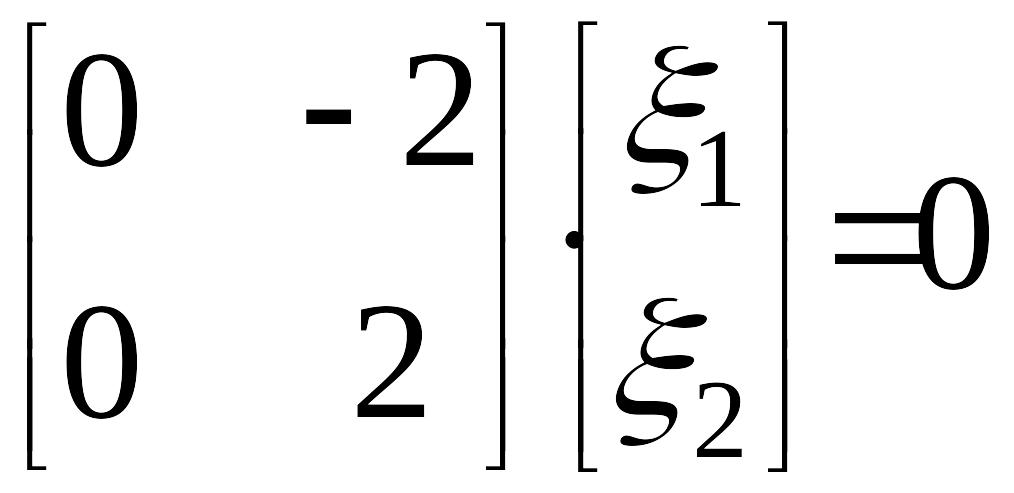
Найдем
собственный вектор матрицы
,
который соответствует
![]() .
.
 ,
,
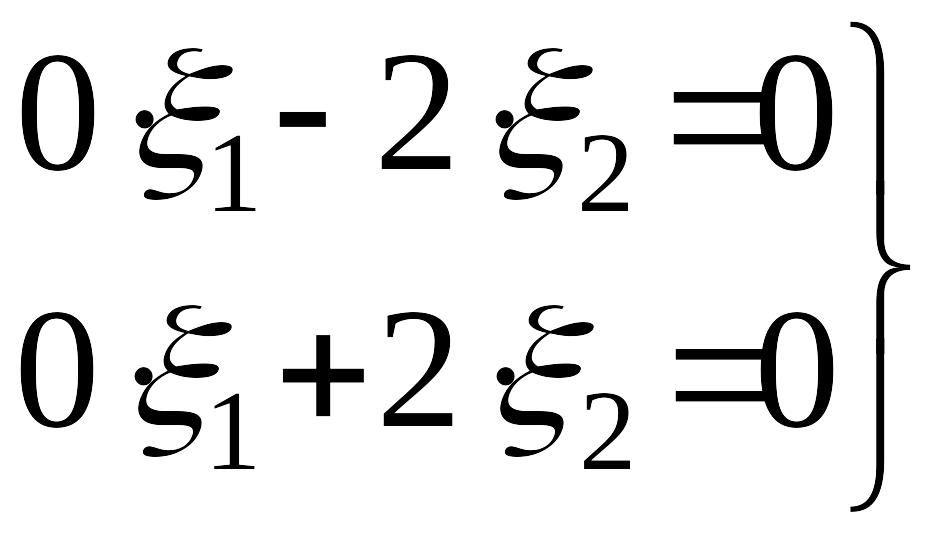 ,
,
![]() (
(![]() может
быть любым)
может
быть любым)
![]() .
.
Найдем
собственный вектор матрицы
,
который соответствует
![]() .
.
 ,
,
 .
.
Второе
уравнение выполняется при любых значениях
и
![]() .
Из первого уравнения
.
Из первого уравнения
![]() получаем
получаем
![]() .
Полагая
.
Полагая
![]() имеем
имеем
![]() .
Следовательно
.
Следовательно
 .
.
Таким образом, матрица линейного преобразования имеет вид
 ,
,
а обратная к ней матрица
 .
.
Тогда
В новых переменных { } уравнения динамики системы
 .
.
Дифференциальные уравнения фазовых траекторий
 .
.
Откуда получаем
![]() .
.
Определим постоянную интегрирования в зависимости от начальных условий. Имеем
,
,
![]() ,
,
 ,
,
откуда
 .
.
Практическое занятие 2. Составление уравнений фазовых траекторий.
ПРИМЕР. Структурная схема системы автоматического управления имеет вид, показанный на рисунке
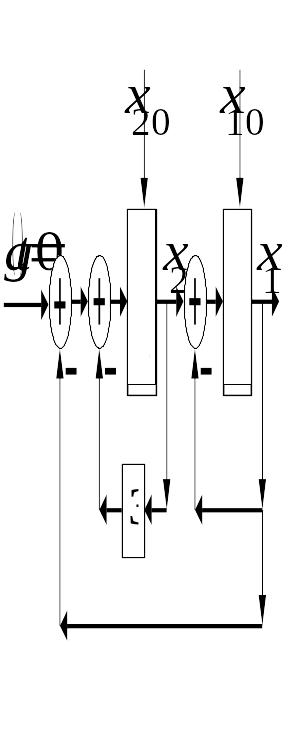
Определить тип особой точки системы. Составить уравнение фазовых траекторий.
РЕШЕНИЕ. Уравнения динамики системы
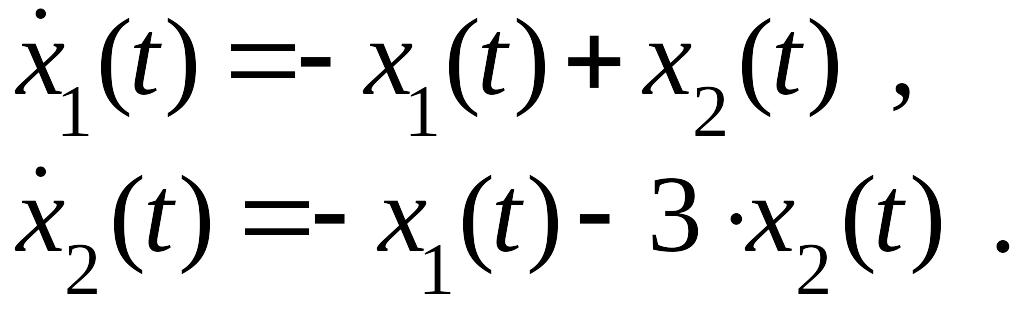
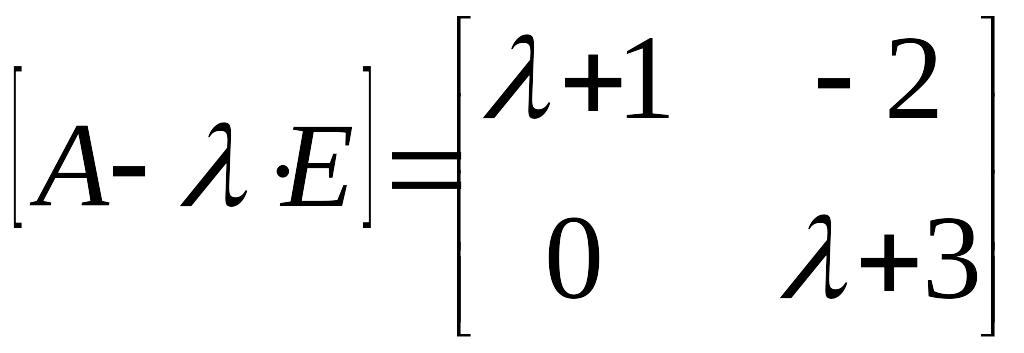
Матрица динамики системы:
 .
.
Характеристический полином системы
 .
.
Корни
характеристического полинома
![]() ,
кратность корня равна двум. Особая
точка: устойчивый вырожденный узел.
,
кратность корня равна двум. Особая
точка: устойчивый вырожденный узел.
Так как корни характеристического уравнения кратны, то каноническая форма записи матрицы –жорданова. Найдем матрицу этого преобразования. Последовательно получаем:
 ,
,
![]() ,
,
 ,
,
 ,
,
, ,
, ,
 ,
,
![]() ,
,
, ,
 ,
,
 ,
,
 .
.
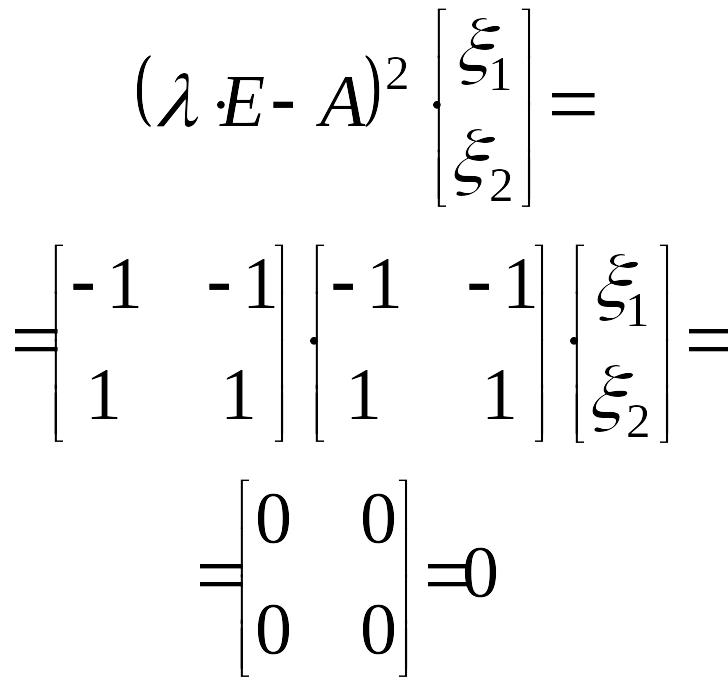
Так
как столбцы матрицы
![]() - это собственные векторы матрицы
,
то
- это собственные векторы матрицы
,
то
В новых переменных { } уравнение динамики системы
![]() ,
,
![]() .
.
Уравнение фазовых траекторий:
 ,
,
 .
.