

Основные методы исследования нелинейных систем:
Методы фазовой плоскости (фазового пространства).
Методы линеаризации (уравнения первого приближения, гармоническая линеаризация).
Специальные методы.
Понятие о методе фазовой плоскости исследования нелинейных систем.
Пусть нелинейная система автоматического управления описывается системой дифференциальных уравнений вида
 . (1)
. (1)
Далее
считаем, что начальные условия для
системы уравнений (1)
![]() и
и
![]() заданы.
заданы.
Состояние
системы в любой момент времени
характеризуется двумя значениями
![]() ,
,
![]() .
.

Введем
в рассмотрение плоскость с координатными
осями
![]() и
и
![]() .
Зафиксируем момент времени
.
Зафиксируем момент времени
![]() и вычислим при этом значении времени
величины
и вычислим при этом значении времени
величины
![]() и
и
![]() .
В плоскости
.
В плоскости
![]() отметим точку
отметим точку
![]() с координатами
с координатами
![]() .
Вычислим следующее значение времени
.
Вычислим следующее значение времени
![]() ,
где
,
где
![]() – постоянное число. При этом значении
– постоянное число. При этом значении
![]() аналогично предыдущему определим
значения
аналогично предыдущему определим
значения
![]() и
и
![]() .
.
На
плоскости
нанесем точку с координатами
с координатами
![]() .
Проведем вышеописанное построение для
.
Проведем вышеописанное построение для
![]() .
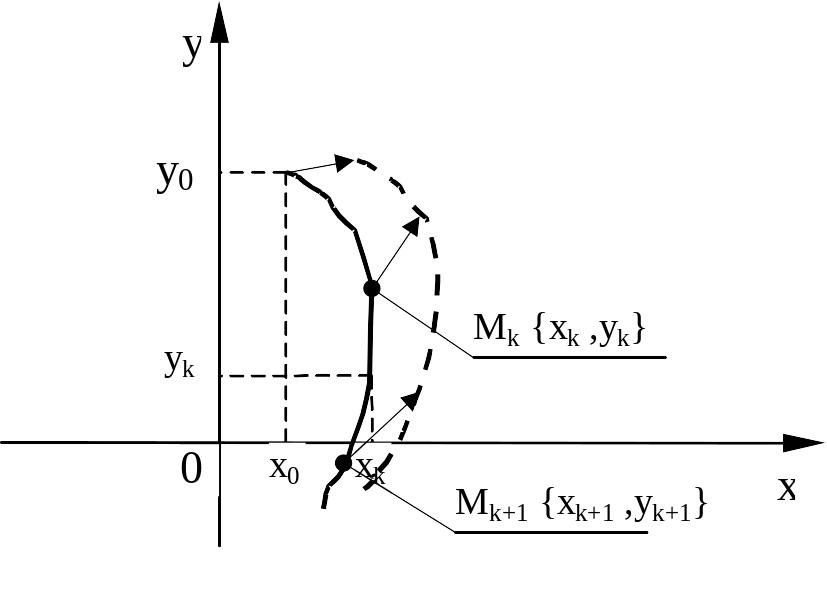
В результате чего получим на плоскости
последовательность точек
.
В результате чего получим на плоскости
последовательность точек
![]() ,
,
![]() ,…,
,
соединив которые получим графическое
изображение кривой
,…,
,
соединив которые получим графическое
изображение кривой
![]() ,
которая называется фазовой траекторией
нелинейной системы (1).
,
которая называется фазовой траекторией
нелинейной системы (1).
Точка
![]() называется изображающей
точкой –
при изменении
от 0 до
называется изображающей
точкой –
при изменении
от 0 до![]() изображающая точка на плоскости
описывает кривую – фазовую
траекторию.
Плоскость
– называется
фазовой плоскостью.
изображающая точка на плоскости
описывает кривую – фазовую
траекторию.
Плоскость
– называется
фазовой плоскостью.
Каждому
новому значению начальных условий
![]() будет соответствовать на фазовой
плоскости своя
фазовая траектория.
будет соответствовать на фазовой
плоскости своя
фазовая траектория.
Множество фазовых траекторий на фазовой плоскости называется фазовым портретом системы автоматического управления.
Значение
нелинейных функций
![]() и
и
![]() ,
стоящие в правой части системы (1) в
каждый момент времени
,
стоящие в правой части системы (1) в
каждый момент времени
![]() определяют проекции скорости движения
изображающей точки на оси координат
и
соответственно. Это потому, что они
согласно дифференциальным уравнениям
(1) соответственно равны
определяют проекции скорости движения
изображающей точки на оси координат
и
соответственно. Это потому, что они
согласно дифференциальным уравнениям
(1) соответственно равны
![]() и
и
![]() .
.
На
фазовой плоскости
существуют характерные точки, которые
определяются нулевыми значениями
проекции вектора скорости:
![]() ,
,
![]() ,
следовательно
,
следовательно
 (2)
(2)
Координаты особых точек определяются как решение системы нелинейных алгебраических уравнений (2). Их может быть несколько.
Пример. Математическая модель системы управления задана уравнениями
 .
.
Требуется найти координаты особых точек (точек равновесного состояния).
Решение.
 ,
,
Это система уравнений для определения координат особых точек. Решим ее:
![]() ,
,
![]() ,
,
![]() .
.
 .
.
Система
обладает тремя состояниями равновесия
при условии, что параметры системы
и
![]() имеют разные знаки.
имеют разные знаки.
![]()
 Координаты
первой особой точки.
Координаты
первой особой точки.
 Координаты
второй особой точки
Координаты
второй особой точки
 Координаты
третьей особой точки
Координаты
третьей особой точки
Если
и
– имеют одинаковые знаки, то у системы
одна точка состояния равновесия, ее
координаты -
и
![]() .
.
В особых точках вектор фазовой скорости нулевой. Это – состояния равновесия системы.
Равенство нулю вектора фазовой скорости создает неопределенность в правой части системы уравнений (1). Поэтому точки равновесия системы называются особыми точками системы на фазовой плоскости.
На фазовых траекториях как правило указывают направление движения изображающей точки. Направление движения определяется направлением фазовой скорости.
Если система дифференциальных уравнений (1) имеет вид
![]() ,
,
![]() , (3)
, (3)
то в этом случае можно сформулировать правило для определения направления движения изображающей точки по фазовым траекториям
в верхней плоскости движение происходит слева направо, т.е. в сторону увеличения
 ,
т.к. там
,
т.к. там
в нижней полуплоскости – движение справа налево, т.к. здесь
 ,
величина
– уменьшается.
,
величина
– уменьшается.ось пересекается фазовыми траекториями под прямым углом, т.к. там скорость
 ,
т.е. имеет место максимум или минимум
величины
.
,
т.е. имеет место максимум или минимум
величины
.
(Правило не действительно в общем случае уравнений (1)).
Из системы дифференциальных уравнений (1) можно получить дифференциальные уравнения фазовых траекторий. Для того чтобы получить дифференциальные уравнения фазовых траекторий системы (1) нужно из них исключить время. Это достигается делением второго уравнения системы (1) на первое
 .
.
Существует соответствие между фазовыми траекториями системы управления и видом переходного процесса и наоборот.
Для
простоты рассмотрим систему уравнений
(3) и пусть состояние равновесия системы
– это точка на фазовой плоскости с
координатами
![]() .
.
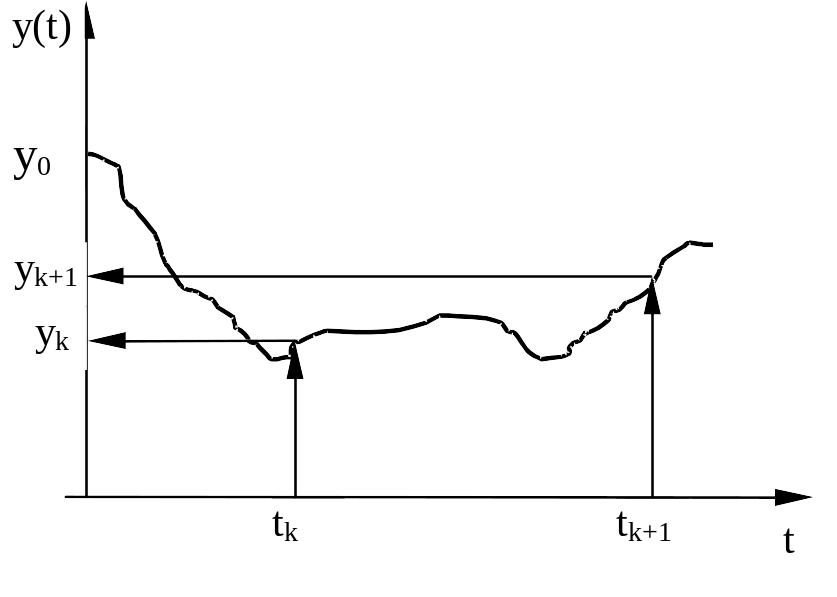
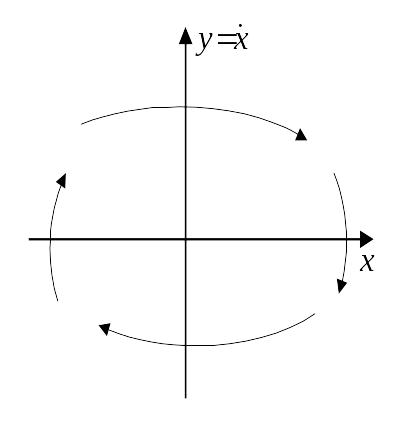
Пусть далее, фазовая траектория системы имеет вид, показанный на рисунке. По заданной фазовой траектории построим переходный процесс в исследуемой системе (3)
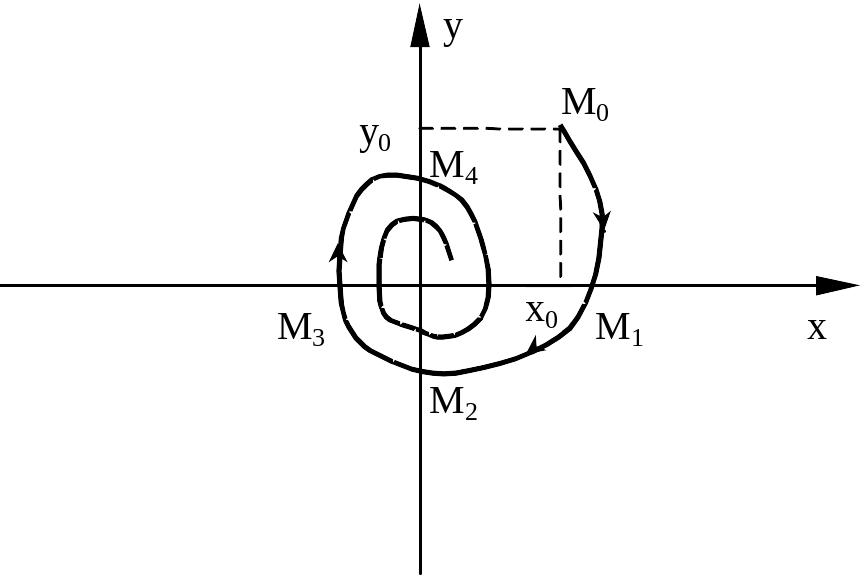
На фазовой траектории отметим характерные точки:
![]() – начальные
условия;
– начальные
условия;
![]() – возможен
экстремум,
– возможен
экстремум,
![]() или
или
![]()
![]() – значение
– график
пересекает ось
– значение
– график
пересекает ось
![]() .
.
![]() – возможен экстремум
графика функции
.
– возможен экстремум
графика функции
.
![]() – значение
– график функции
пересекает ось
.
– значение
– график функции
пересекает ось
.
Точка
находится первом квадрате
![]() ,
,
![]() .
Между точками
.
Между точками
![]()
![]() ,
следовательно
возрастает, между
,
следовательно
возрастает, между
![]()
![]() ,
следовательно
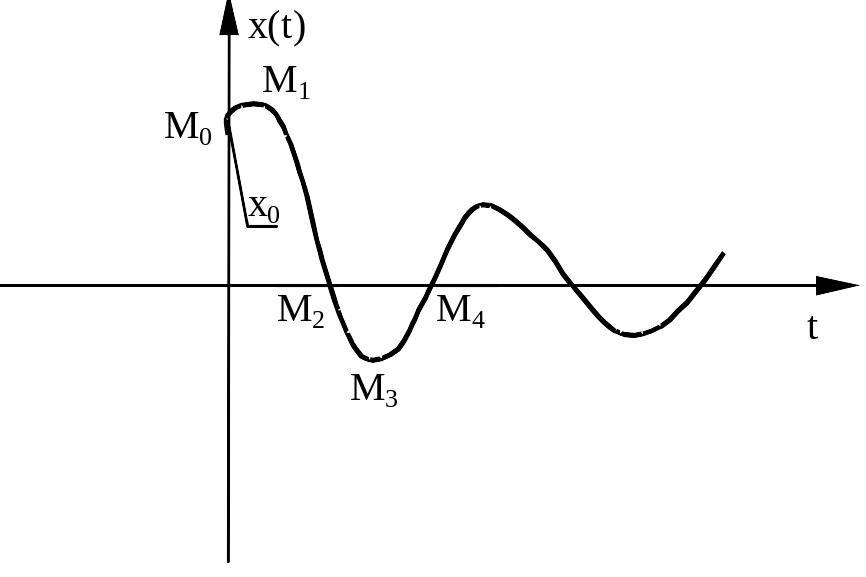
убывает. Это значит, что точке
соответствует максимум графика функции
.
Точке
,
следовательно
убывает. Это значит, что точке
соответствует максимум графика функции
.
Точке
![]() – соответствует точка пересечения
графика функции
оси
.
Между точками
– соответствует точка пересечения
графика функции
оси
.
Между точками
![]() ,
следовательно
продолжает убывать. Между точками
,
следовательно
продолжает убывать. Между точками
![]() y
> 0 и
начинает возрастать. Это значит, что
y
> 0 и
начинает возрастать. Это значит, что
![]() – соответствует точке минимума графика
функции
.
Точке
– соответствует точке минимума графика
функции
.
Точке
![]() соответствует точка пересечения графика
функции
оси
.
Продолжая аналогичные построения можно
построить весь переходный процесс.
соответствует точка пересечения графика
функции
оси
.
Продолжая аналогичные построения можно
построить весь переходный процесс.
По
переходному процессу можно построить
фазовую траекторию. Для этого в точках
,
,
…, вычисляют значение
![]() – производной
.
Считая, что эти вычисленные значения
,
– производной
.
Считая, что эти вычисленные значения
,
![]() – это координаты изображающей точки
наносим их на фазовую плоскость. Соединив
их, получим фазовую траекторию исследуемой
системы.
– это координаты изображающей точки
наносим их на фазовую плоскость. Соединив
их, получим фазовую траекторию исследуемой
системы.
Удобство изображения фазовых траекторий на плоскости состоит в том, что в виде единого «фазового портрета» представляется вся совокупность возможных форм процессов в системе управления.
Недостатком является то, что мы вынуждены ограничиваться рассмотрением лишь системами второго порядка. Для исследования систем высокого порядка применяются другие методы.