

Способ построения диаграмм качества.
Пусть
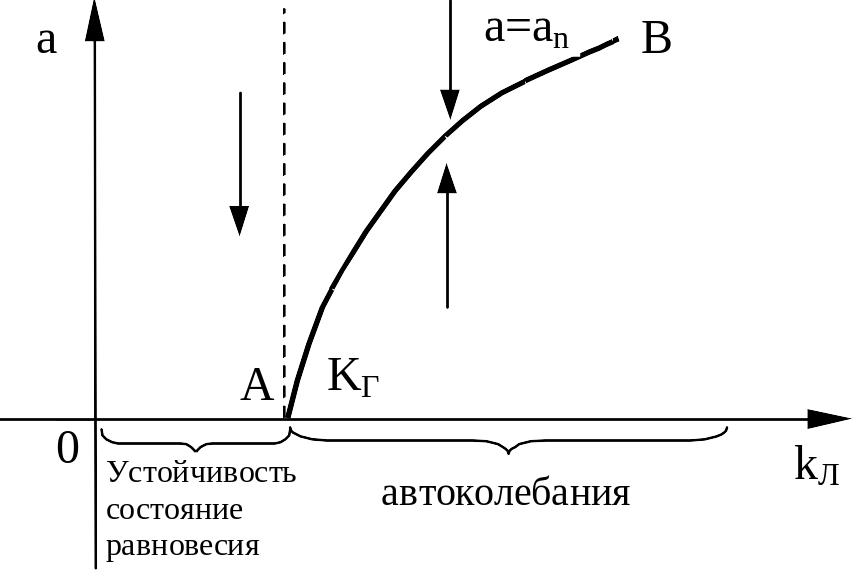
в какой-либо системе мы определили
зависимость амплитуды автоколебаний
![]() от параметра
,
(см рис).
от параметра
,
(см рис).
Здесь
по параметру
![]() выделена область равновесного состояния.
В автоколебательном режиме имеем
выделена область равновесного состояния.
В автоколебательном режиме имеем
![]()
Ниже
линии
колебания расходятся. Следовательно,
там
![]() .
Выше линии
колебания затухают и, значит, там
.
На самой линии
имеем
.
Выше линии
колебания затухают и, значит, там
.
На самой линии
имеем
![]() .
.
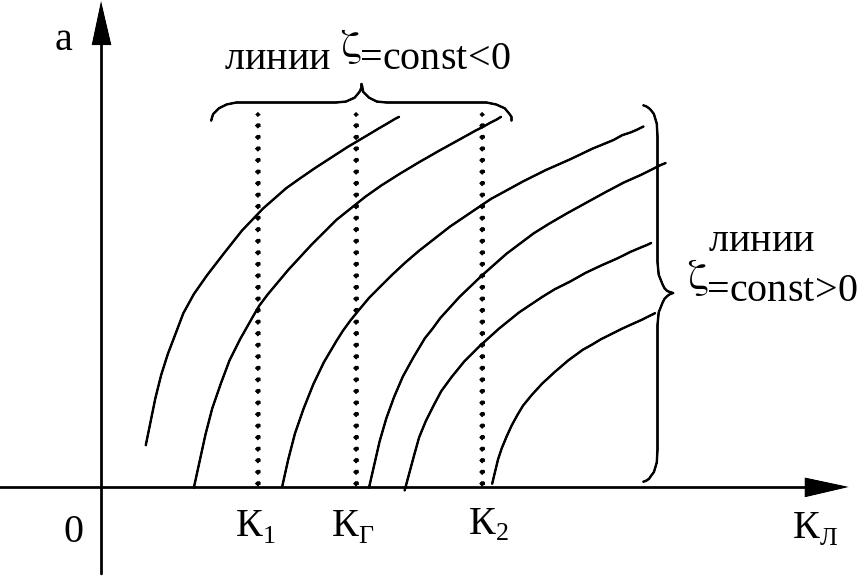
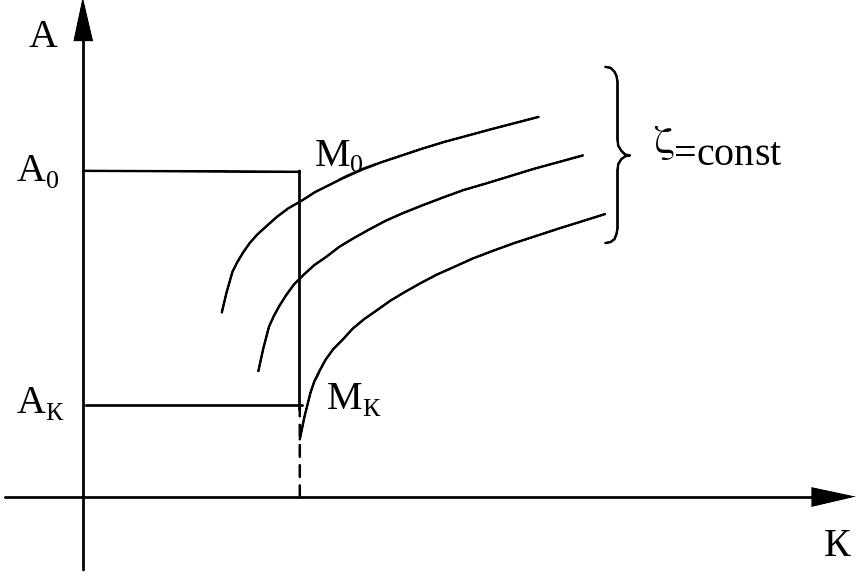
Если на основании уравнений (7) провести линии равных значений , то получится диаграмма, изображенная на рисунке.
Взяв
некоторое значение
![]() в области устойчивости равновесия,
получим (идя по вертикали) зависимость
в области устойчивости равновесия,
получим (идя по вертикали) зависимость
![]() ,
которая имеет вид.
,
которая имеет вид.
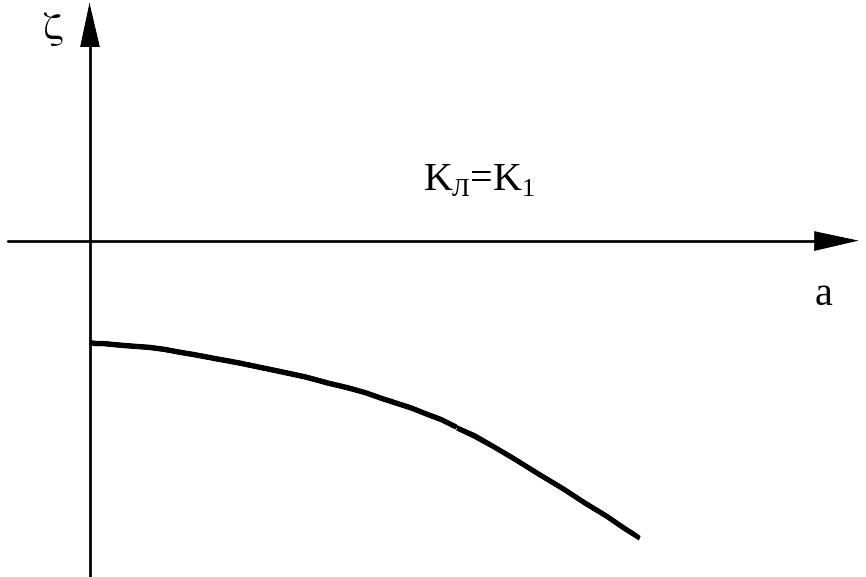
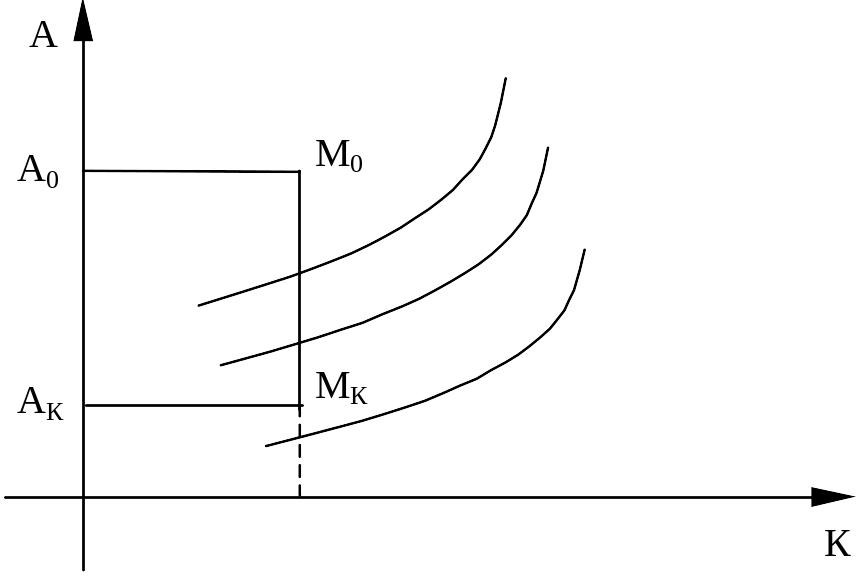
Для
значения
![]() в области автоколебаний зависимость
будет иметь иной вид.
в области автоколебаний зависимость
будет иметь иной вид.

Эти графики дают представление о качестве затухания колебательных переходных процессов при разных значениях параметра .
Можно найти огибающую переходного колебательного процесса согласно (1), по формуле
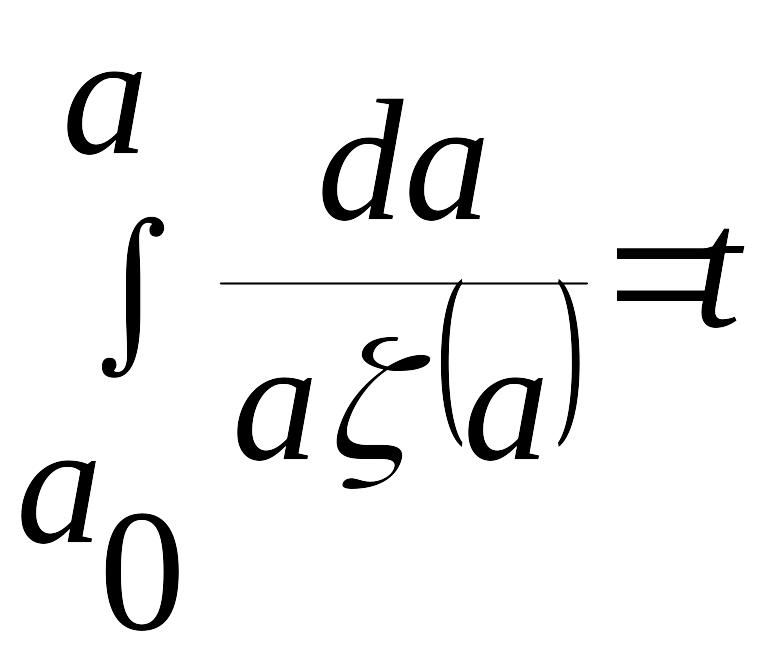 .
(8)
.
(8)
Интегрирование (8) в конечной форме возможно лишь в простейших случаях. Поэтому приведем графический способ построения огибающей . Введем в рассмотрение текущую «постоянную времени»
 .
.
В
линейных системах
![]() .
Здесь же
медленно изменяется с изменением
амплитуды. Значения
.
Здесь же
медленно изменяется с изменением
амплитуды. Значения
![]() ,
согласно формуле (9), берутся из диаграммы
качества для каждого значения
при заданном
.
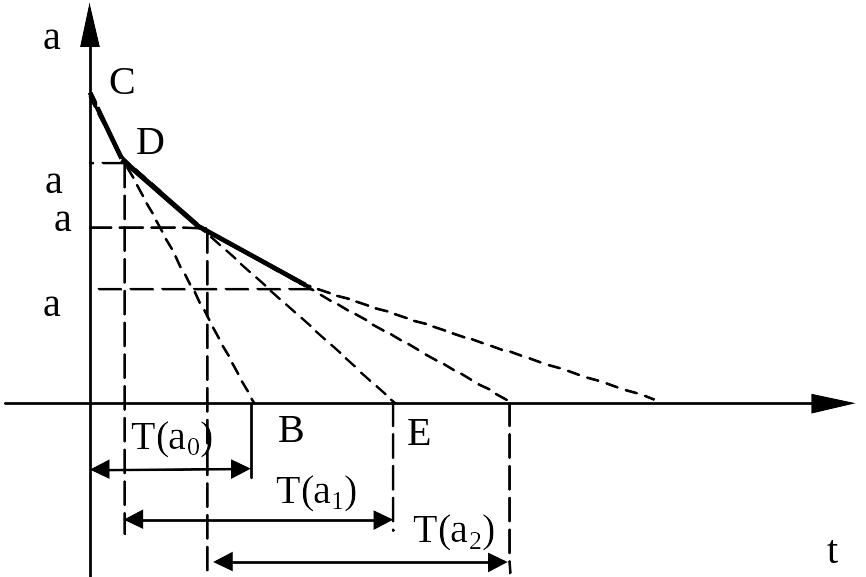
Считая
на небольшом промежутке времени, проводим
графическое построение огибающей
указанной на рисунке
,
согласно формуле (9), берутся из диаграммы
качества для каждого значения
при заданном
.
Считая
на небольшом промежутке времени, проводим
графическое построение огибающей
указанной на рисунке
Укажем другой способ оценки быстроты затухания переходных процессов в нелинейной системе с одной однозначной нелинейностью . Передаточная функция линейной части имеет вид
 .
.
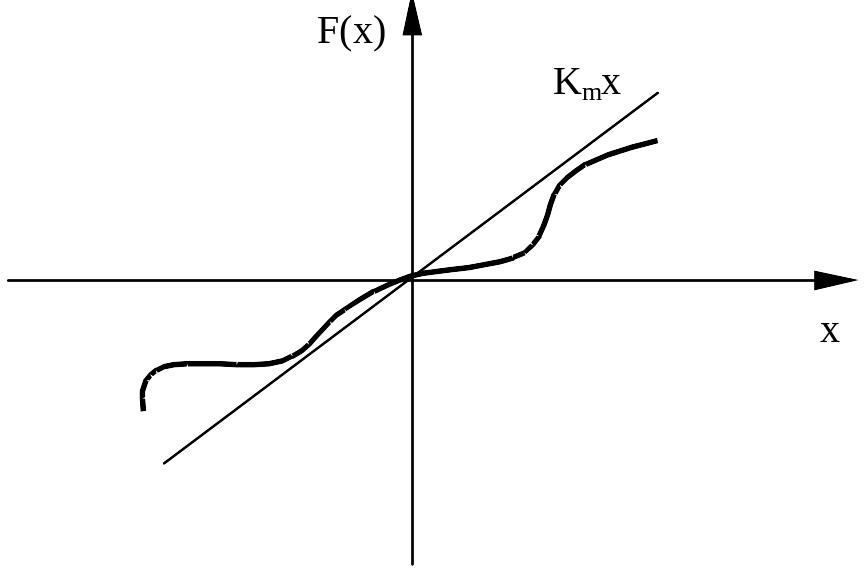
Нелинейная
характеристика
![]() расположена в секторе
и может иметь произвольное очертание.
расположена в секторе
и может иметь произвольное очертание.
Этот способ основан на применении частотного критерия абсолютной устойчивости.
На комплексной плоскости строится смещенная частотная характеристика, определяемая следующим образом:
![]() (10)
(10)
где
 .
.
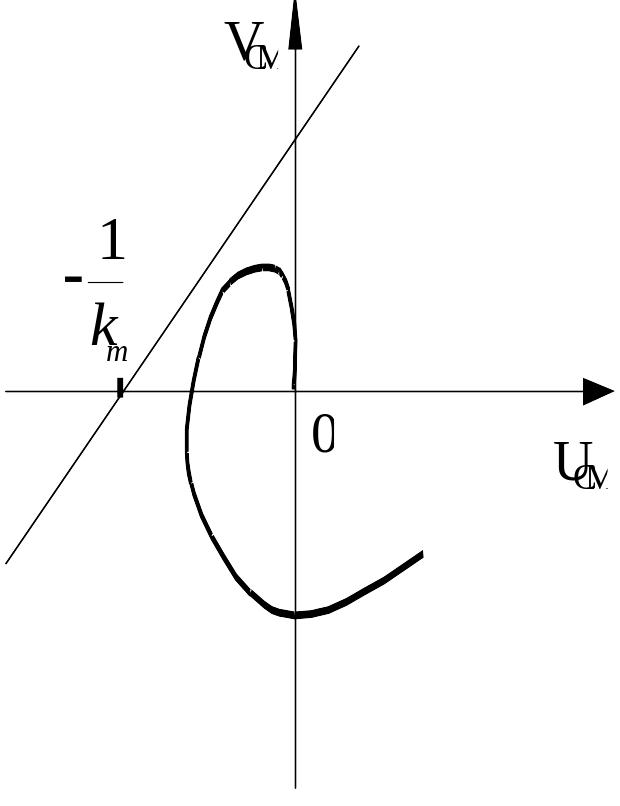
Оценить быстроту затухания переходного процесса в системе можно следующим образом.
Нелинейная
система с устойчивой линейной частью
и нелинейной характеристикой, расположенной
внутри сектора
![]() ,
будет обладать показателем затухания,
не меньшим данного
,
будет обладать показателем затухания,
не меньшим данного
![]() ,
если через точку
можно провести прямую с любым наклоном
так, что она не пересечет смещенной
характеристики
,
если через точку
можно провести прямую с любым наклоном
так, что она не пересечет смещенной
характеристики
![]() .
Эта оценка проиллюстрирована рисунком
.
Эта оценка проиллюстрирована рисунком
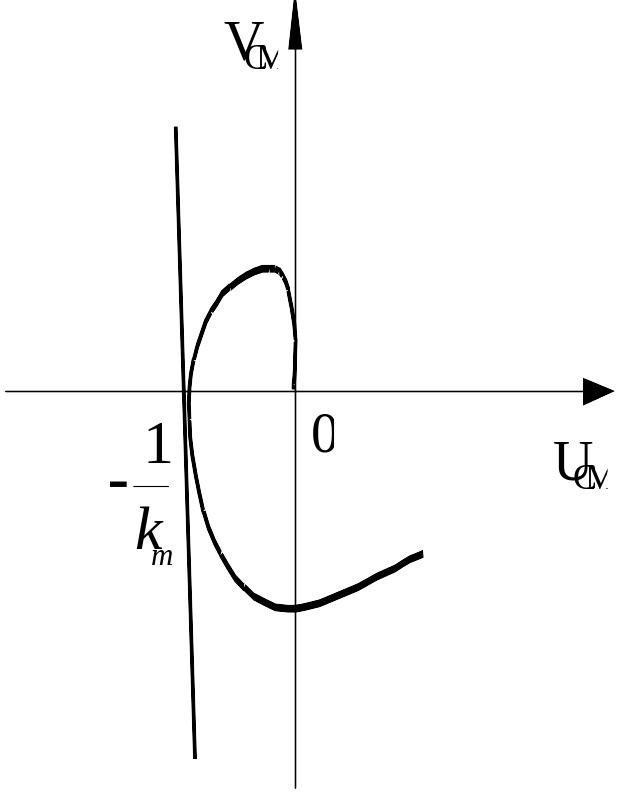
Можно
определить предельное значение
![]() ,
при котором в системе имеет место
показатель затухания, не меньший
,
как показано на рисунке.
,
при котором в системе имеет место
показатель затухания, не меньший
,
как показано на рисунке.
Если
построить серию смещенных частотных
характеристик для различных значений
,
то получим зависимость
![]() ,
т.е. зависимость показателя затухания
от размера сектора, в котором лежит
нелинейная характеристика.
,
т.е. зависимость показателя затухания
от размера сектора, в котором лежит
нелинейная характеристика.
Количественно судить о показателях качества переходного процесса можно непосредственно по диаграммам качества переходного процесса, не строя самого процесса.
Время
затухания переходного процесса на
заданном интервале изменения амплитуд
от
![]() до
до
![]() определяется по формуле
определяется по формуле
 .
.
На основании чего можно дать приближенную оценку
 ,
,
где
![]() есть среднее значение показателя
затухания, взятое ориентировочно из
диаграммы качества для исследуемого
участка
есть среднее значение показателя
затухания, взятое ориентировочно из
диаграммы качества для исследуемого
участка
![]() (см. рис.)
(см. рис.)

Для
более точного определения времени
затухания
![]() надо разбить участок
на
отрезков и вычислить
надо разбить участок
на
отрезков и вычислить
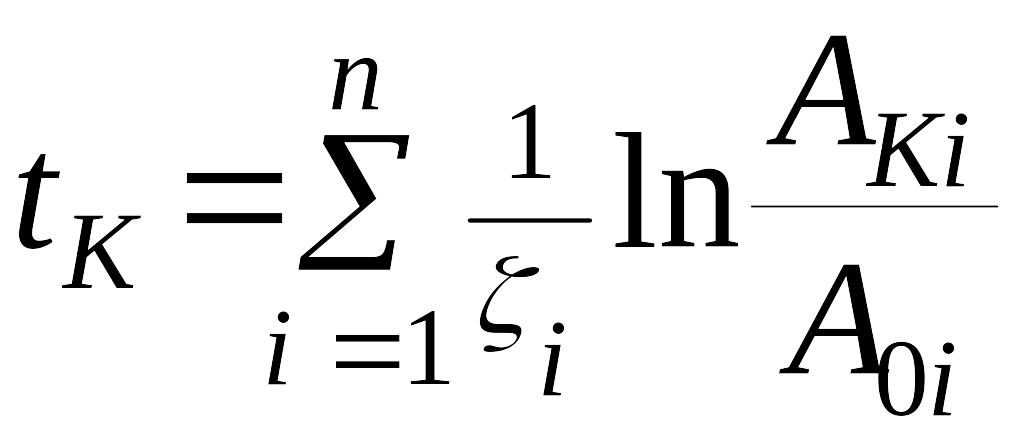 ,
,
где
![]() есть взятое из диаграммы значение
в середине каждого отрезка
;
есть взятое из диаграммы значение
в середине каждого отрезка
;
![]() – значение ординаты
в начале и конце каждого отрезка.
– значение ординаты
в начале и конце каждого отрезка.
Для
определения величины перерегулирования
надо найти значение амплитуды
при
![]()
При
и
![]() приходим к уравнению
приходим к уравнению
 ,
,
откуда
можно найти
,
которое и будет представлять собой
величину перерегулирования
![]() .
В качестве оценки можно использовать
.
В качестве оценки можно использовать
 ,
(12)
,
(12)
откуда,
учитывая, что
![]() получаем оценку перерегулирования в
виде
получаем оценку перерегулирования в
виде
 ,
(13)
,
(13)
где
и
![]() среднее значение величины
и
взятые из диаграммы для исследуемого
участка
.
среднее значение величины
и
взятые из диаграммы для исследуемого
участка
.
Для более точной оценки величины перерегулирования нужно разбить участок на несколько отрезков и вычислить
 ,
(14)
,
(14)
где
![]() и
–значения
и
в середине каждого отрезка;
– значение ординаты
в начале и конце каждого отрезка.
и
–значения
и
в середине каждого отрезка;
– значение ординаты
в начале и конце каждого отрезка.
Вычисления
по формуле (14) надо вести, начиная от
точки
до тех пор, пока не получится в сумме
![]() .
.
При этом величина перерегулирования будет
![]() ,
,
где
![]() – ордината конца последнего из отрезов,
участвующих в этом вычислении.
– ордината конца последнего из отрезов,
участвующих в этом вычислении.
Для
определения числа колебаний
![]() за время переходного процесса надо
довести вычисления по формуле (14) до
конца, т.е. найти
за время переходного процесса надо
довести вычисления по формуле (14) до
конца, т.е. найти
 .
.
Для грубой оценки можно считать
Если, например, требуется, чтобы на исследуемом отрезке было не более одного колебания, то надо потребовать, чтобы
 .
.
Если
же задано максимально допустимое
перерегулирование
![]() ,
то, согласно (9), должно быть
,
то, согласно (9), должно быть
 .
.
Диаграммы качества строятся для переменной , стоящей в уравнении системы под знаком нелинейности. Если желательно пересчитать ее на какую-либо другую переменную, то можно применить формулу для определения амплитуды новой переменной, используя соответствующую передаточную функцию, связывающую эти переменные в исследуемой системе.
3.ЛАБОРАТОРНЫЕ ЗАНЯТИЯ