

Видоизмененная частотная характеристика.
Выше при помощи соотношения (14) была выведена функция
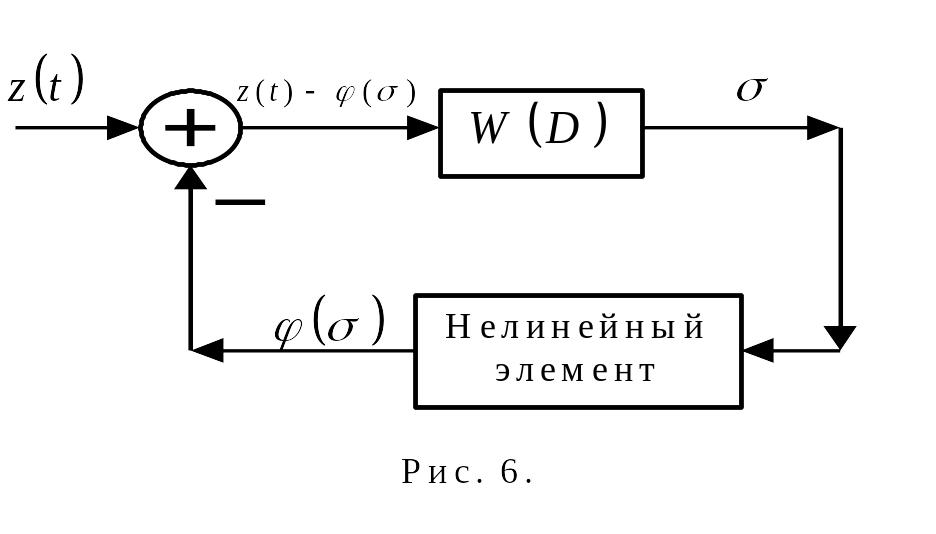
Разомкнем цепь обратной связи у системы, изображённой на рис.2. Разомкнутая система (рис.6) будет описываться уравнением
![]() ,
(25)
,
(25)
где
через
![]() обозначен сигнал, поданный на вход
системы.
обозначен сигнал, поданный на вход
системы.
Как следует из уравнения (25), функция представляет собой передаточную функцию разомкнутой системы, показанной на рис.6. В соответствии с выражением (14) частотная характеристика разомкнутой системы будет
 .
(26)
.
(26)
Введём
теперь функцию
![]() ,
определяемую следующими соотношениями
,
определяемую следующими соотношениями
 ,
(27)
,
(27)
Таким
образом, функция
![]() будет
иметь вид
будет
иметь вид
![]() .
(28)
.
(28)
Так
как
![]() является четной функцией от
,
а
является четной функцией от
,
а
![]() является нечетной функцией от
,
то в соответствии с (27) функция
является нечетной функцией от
,
то в соответствии с (27) функция
![]() будет четной функцией от
и, таким образом,
будет четной функцией от
и, таким образом,
![]() .
(29)
.
(29)
Функция называется видоизменённой частотной характеристикой.
Так
как в соответствии с (14) функция
представляет собой дробно-рациональную
функцию, степень числителя у которой
ниже степени знаменателя, то для
![]() будем иметь следующее выражение
будем иметь следующее выражение
 ,
,
![]() . (30)
. (30)
В
знаменателе выражения (30) коэффициент
при
![]() равен единице, так как согласно (9)
.
Полагая
равен единице, так как согласно (9)
.
Полагая
![]() ,
получим согласно (30), что
,
получим согласно (30), что
 .
(31)
.
(31)
Из выражения (31) следует, что
 ,
,
![]() . (32)
. (32)
Умножая левую и правую части выражения (31) на , получим
 .
(33)
.
(33)
Учитывая, что в соответствии с (27)
 ,
,
найдем, что
 ,
,
 ,
,
и, следовательно
 .
(34)
.
(34)
Значение
 будет различным в случае, когда
будет различным в случае, когда
![]() ,
и в случае, когда
,
и в случае, когда
![]() .
.
При
,
то есть при
![]() ,
будем согласно (31) и (33) иметь
,
будем согласно (31) и (33) иметь
 ,
,
 .
.
При будем иметь
,
 .
.
Таким образом,
 .
.
Критерий устойчивости В. М. Попова.
Определение. Систему (1)
, ,
, (1)
,
тривиальное решение которой асимптотически устойчиво при любых видах функции , удовлетворяющих условию (6)
,
будем
называть абсолютно устойчивой в угле
![]() .
.
Так
как линейные функции
,
![]() входят в число допустимых условием (6)
функции
,
то требование, чтобы годограф вектора
не пересекал полуотрезка
(рис. 5), является необходимым условием
абсолютной устойчивости системы (1).
Достаточное условие абсолютной
устойчивости даёт теорема В.-М. Попова.
входят в число допустимых условием (6)
функции
,
то требование, чтобы годограф вектора
не пересекал полуотрезка
(рис. 5), является необходимым условием
абсолютной устойчивости системы (1).
Достаточное условие абсолютной
устойчивости даёт теорема В.-М. Попова.
Критерий
устойчивости В.-М. Попова.
Для того чтобы система (1) была абсолютно
устойчива в угле
,
достаточно, чтобы существовало такое
конечное действительное число
,
при котором для всех значений
![]() выполнялось условие
выполнялось условие
![]() .
(36)
.
(36)
Заметим,
что сформулированное в теореме В.-М.
Попова достаточное условие (36) абсолютной
устойчивости нелинейной системы
существенно отличается от требований
критерия Найквиста для линейных систем.
Последний накладывает ограничение на
значение
лишь в точках, где
![]() .
В других точках значение
может быть любым, так как ограничение
значения
в точках, где
,
уже предотвращает возможность охвата
точки
.
В других точках значение
может быть любым, так как ограничение
значения
в точках, где
,
уже предотвращает возможность охвата
точки
![]() годографом вектора
,
что и обеспечивает асимптотическую
устойчивость замкнутой линейной системы.
Сформулированное же в теореме В.-М.
Попова достаточное условие (36) абсолютной
устойчивости нелинейной системы требует
ограничения значений
годографом вектора
,
что и обеспечивает асимптотическую
устойчивость замкнутой линейной системы.
Сформулированное же в теореме В.-М.
Попова достаточное условие (36) абсолютной
устойчивости нелинейной системы требует
ограничения значений
![]() для всех
,
а не только в точках, где
.
для всех
,
а не только в точках, где
.
Выше была введена видоизменённая частотная характеристика . Обозначим через и соответственно действительную и мнимую части . Согласно (27) будем тогда иметь
 (37)
(37)
В соответствии с (37)
![]() (1.38)
(1.38)
Условие (36), таким образом, принимает вид
 (для
всех
).
(39)
(для
всех
).
(39)
На
плоскости
![]() (то есть на плоскости комплексного
переменного
(то есть на плоскости комплексного
переменного
![]() )
уравнение
)
уравнение
 ,
,
или эквивалентное ему уравнение
 ,
(40)
,
(40)
определяет
собой прямую (рис.7), проходящую через
точку
![]() .
Угловой коэффициент этой прямой равен
.
Угловой коэффициент этой прямой равен
![]() .
Прямую (40) можно назвать прямой Попова.
.
Прямую (40) можно назвать прямой Попова.
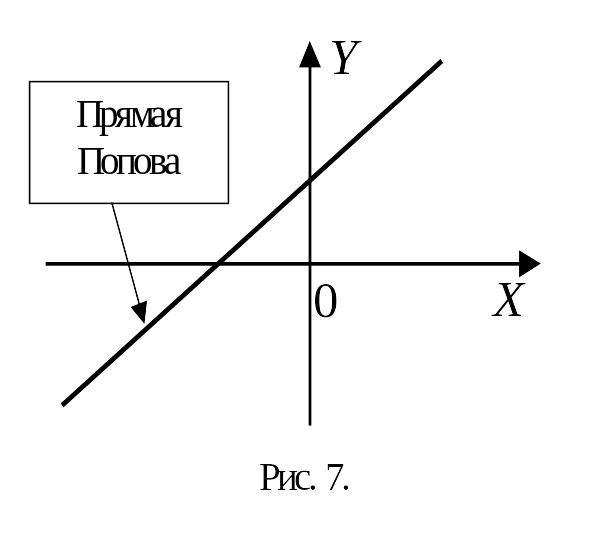
Нетрудно видеть, что условие (39) выполняется в любой точке плоскости комплексного переменного ,расположенной правее прямой Попова. Иными словами, условие (39) означает, что годограф вектора должен быть расположен правее прямой Попова.
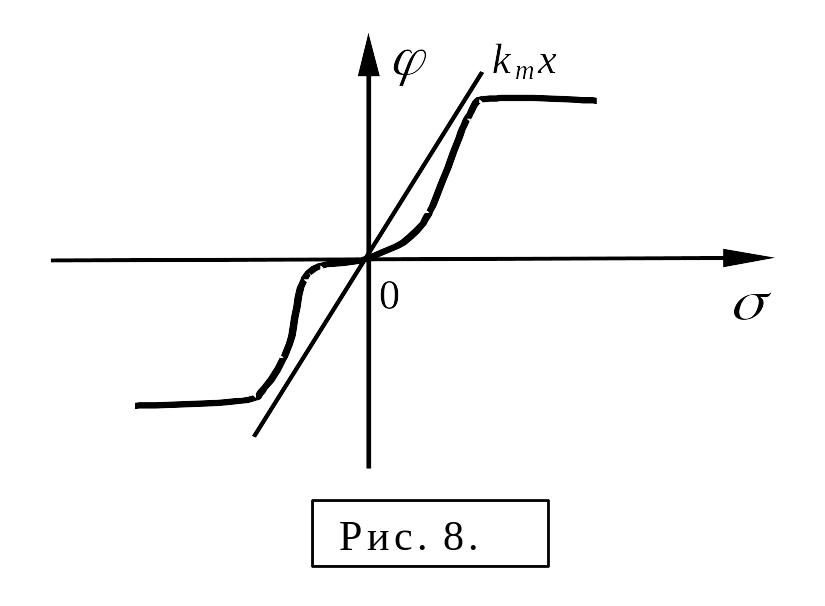
Итак,
если в системе имеется нелинейный
элемент с однозначной характеристикой
![]() (см. рис. 8), то возможны два случая. Первый
– нелинейная характеристика расположена
в секторе
(см. рис. 8), то возможны два случая. Первый
– нелинейная характеристика расположена
в секторе
![]() (см. рис. 8), второй в секторе
(см. рис. 8), второй в секторе
![]() .
.
Начнем с первого случая,
![]() .
(41)
.
(41)
Пусть
теперь линейная часть системы описывается
уравнением
![]() ,
причем степень многочлена
,
причем степень многочлена
![]() больше степени многочлена
больше степени многочлена
![]() .
.
Передаточная
функция линейной части
 имеет полюса с отрицательными вещественными
частями, причем допускается наличие не
более двух нулевых полюсов.
имеет полюса с отрицательными вещественными
частями, причем допускается наличие не
более двух нулевых полюсов.
По
критерию В.М. Попова состояние равновесия
нелинейной системы будет абсолютно
устойчивым, если нелинейная характеристика
находится в секторе
и существует такое действительное число
,
что при всех
![]() выполняется неравенство
выполняется неравенство
 ,
(42)
,
(42)
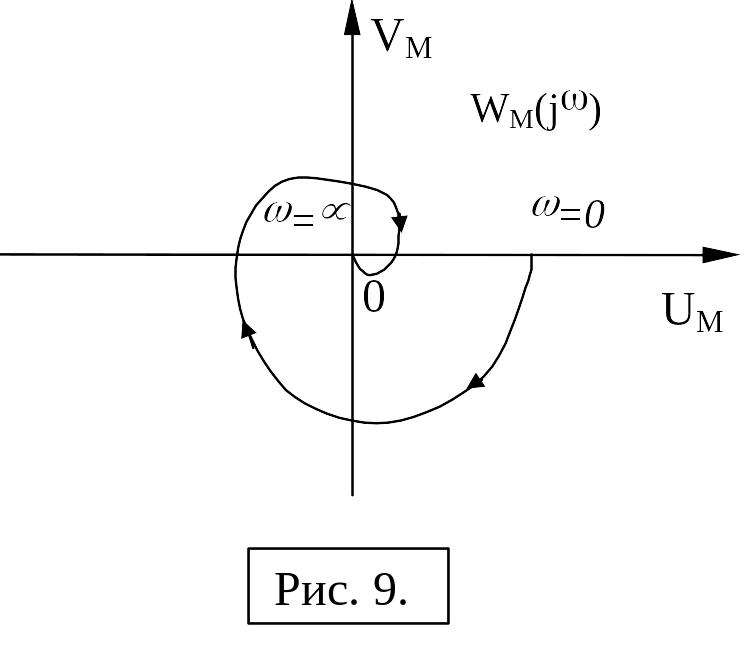
где – амплитудно-фазовая частотная характеристика линейной части системы.
Для удобства графического представления этого критерия вводится модифицированная частотная характеристика линейной части
![]() ,
,
где
![]() .
(43)
.
(43)
Следовательно
график
![]() имеет вид, аналогичный амплитудно-фазовой
характеристики линейной части
и отличается от нее только масштабом
по мнимой оси (рис. 9).
имеет вид, аналогичный амплитудно-фазовой
характеристики линейной части
и отличается от нее только масштабом
по мнимой оси (рис. 9).
Поскольку выражение (42) можно записать в виде
 ,
,
то с подстановкой (43) оно преобразуется к виду
 .
(44)
.
(44)
Выражение
 (45)
(45)
представляет
собой уравнение прямой на плоскости
прямоугольных координат
![]() .
Эта прямая проходит через точку
.
Эта прямая проходит через точку
![]() на оси
на оси
![]() и имеет крутизну наклона
и имеет крутизну наклона
![]() .
.
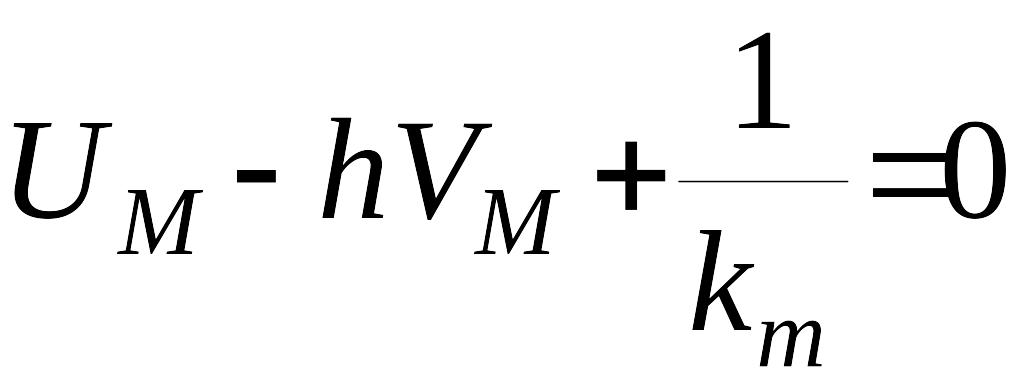
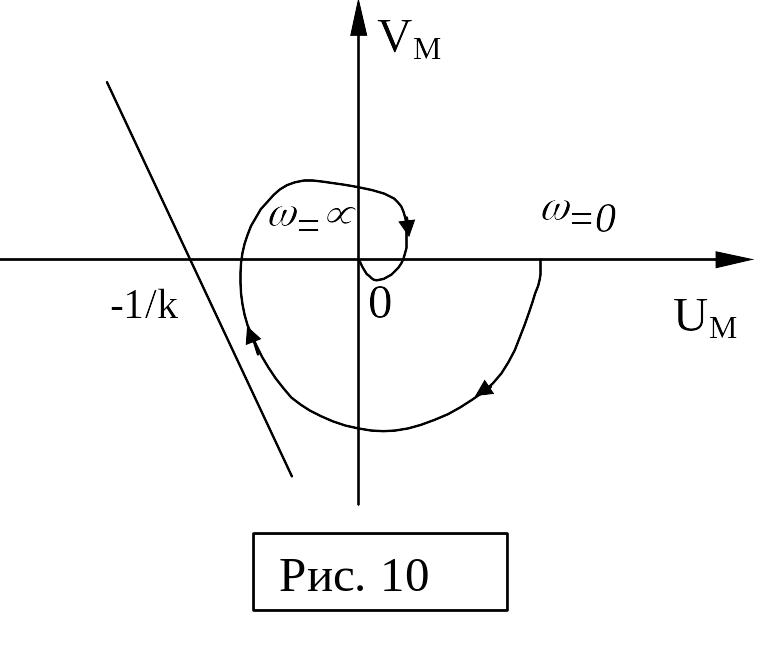
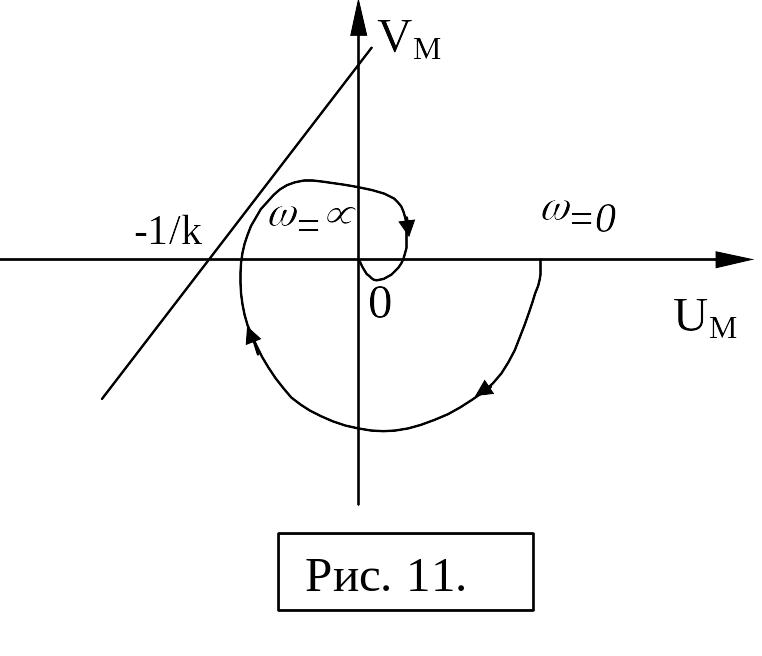
Отсюда вытекает следующая формулировка критерия абсолютной устойчивости.
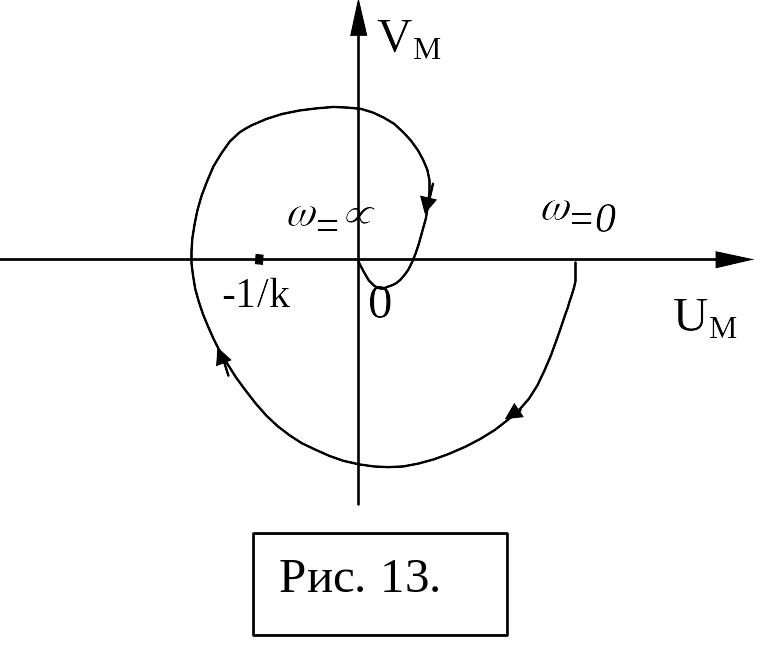
Состояние равновесия нелинейной системы абсолютно устойчиво, если нелинейная характеристика находится внутри сектора и можно провести через точку прямую так, что она не пересечет модифицированную частотную характеристику (последняя лежит справа).
На рис. 10 и 11 показаны случаи, когда критерий абсолютной устойчивости выполняется, а на рис. 12 и 13 – не выполняется.
ЛЕКЦИЯ 15. ОЦЕНКА КАЧЕСТВА ПРОЦЕССОВ В НЕЛИНЕЙНЫХ СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
Рассмотрим определение качества переходных колебательных процессов в нелинейных системах.
Эти процессы могут быть
затухающими (к нулю либо к автоколебаниям);
расходящимися (изнутри до амплитуды автоколебаний; неограниченно возрастающие
 неустойчивые процессы).
неустойчивые процессы).
Колебательные переходные процессы в системе управления будем рассматривать как собственные колебания при отсутствии внешних воздействий во время самого процесса.
Рассмотрим систему, структурная схема которой может быть приведена к виду
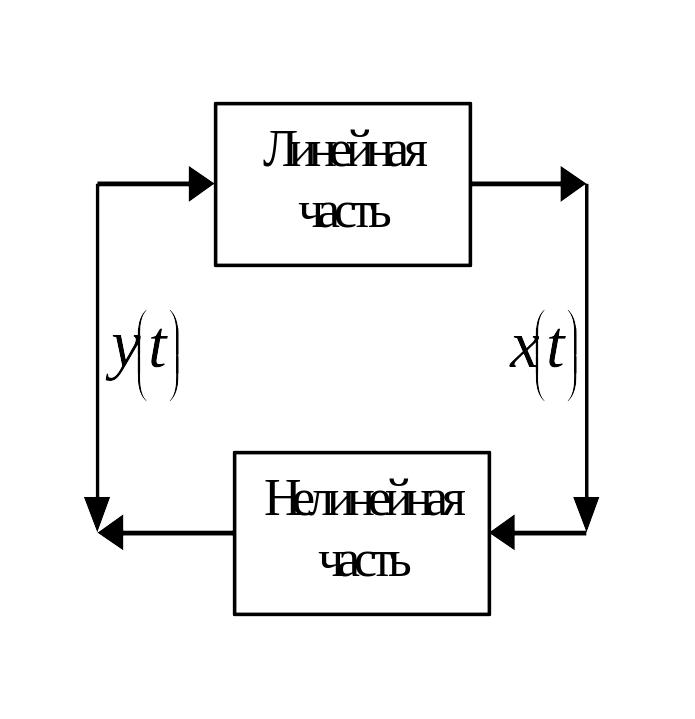
Будем считать, что динамика замкнутой системы описывается уравнением
![]() .
(1)
.
(1)
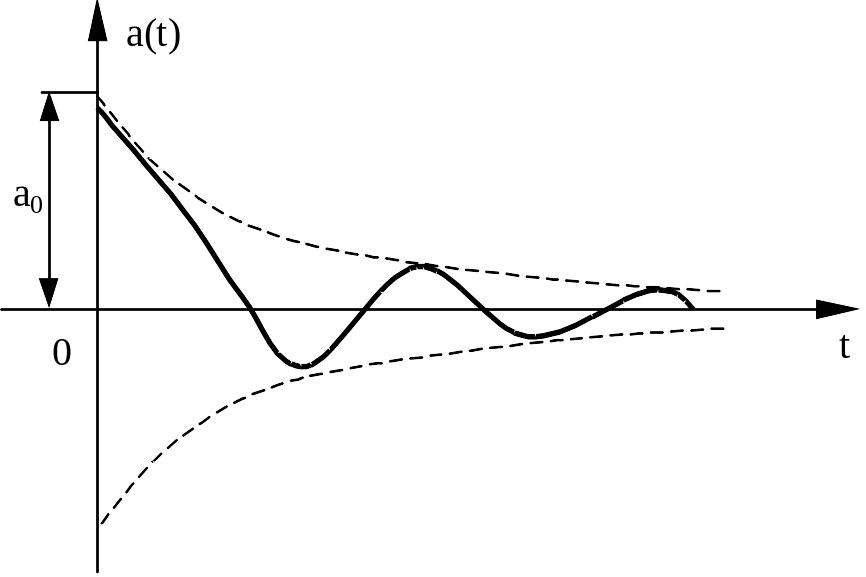
В линейных системах синусоидальные переходные процессы имеют вид
![]() .
(2)
.
(2)
Для линейной системы высокого порядка такое решение является приближенным в том смысле, что оно соответствует одной паре комплексных корней характеристического уравнения системы. Чтобы это решение отвечало основной части переходного процесса, эта пара корней должна быть ближайшей к мнимой оси.
В
нелинейных системах, удовлетворяющих
свойству фильтра, будем считать, что
переходные колебательные процессы
близкими к синусоидальным (2), полагая,
что показатель затухания
![]() и частота
изменяются медленно с изменением
амплитуды колебаний
в ходе процесса. Сама же амплитуда
и частота
изменяются медленно с изменением
амплитуды колебаний
в ходе процесса. Сама же амплитуда
![]() изменяется быстро.
изменяется быстро.
Тогда решение вместо (2) надо искать в виде
 .
(3)
.
(3)
(как
частный случай
![]() получается формула (2) для линейной
системы)
получается формула (2) для линейной
системы)
При
![]() колебания затухают,
колебания затухают,
При – расходятся.
Гармоническая линеаризация нелинейного звена здесь изменится, т.к. из (3) следует
![]() .
.
Отсюда
 .
.
Поэтому первая гармоника колебаний на выходе нелинейного звена имеет вид
 ,
(4)
,
(4)
где коэффициенты гармонической линеаризации и вычисляются по формулам
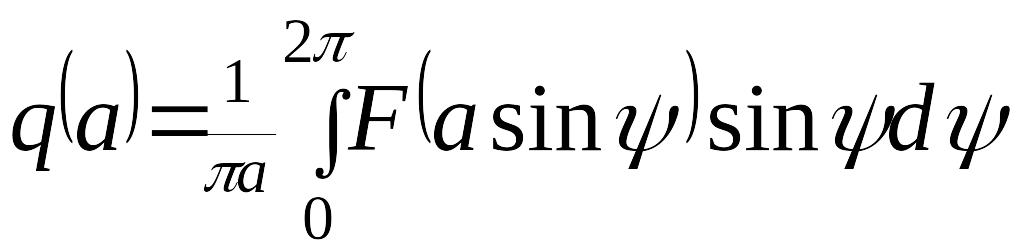 ,
,
 .
.
Колебательные процессы в линейных системах соответствуют комплексно сопряженные корни характеристического уравнения системы. Следовательно, для их определения нужно в характеристическое уравнение гармонически линеаризованной системы
подставить
![]() ,
полагая, что это соответствует ближайшей
к мнимой оси паре комплексных корней.
В результате получим
,
полагая, что это соответствует ближайшей
к мнимой оси паре комплексных корней.
В результате получим
![]() .
(5)
.
(5)
Это
уравнение относительно трех неизвестных:
![]() .
Следовательно, из этого уравнения можно
найти, например,
.
Следовательно, из этого уравнения можно
найти, например,
![]() .
(6)
.
(6)
Этого достаточно, чтобы затем по формулам (3) приблизительно определить и кривую переходных колебаний .
В большинстве случаев при проектировании системы автоматического управления и регулирования не требуется вычислять кривую переходного процесса. Нужна лишь оценка быстроты затухания и частоты колебаний, т. е. для оценки качества переходного процесса в колебательных нелинейных системах в большинстве случаев можно ограничиться определением зависимостей из уравнения (5).
Один из способов определения этих зависимостей состоит в следующем. Выделим в уравнении (5) вещественную и мнимую части и получим два уравнения
 ,
(7)
,
(7)
из которых и определяется зависимость (6).
Если
требуется выбрать какой-либо параметр
системы, например коэффициент усиления
линейной части
![]() ,
так, чтобы
и
удовлетворяли заданным требованиям,
то можно пользоваться так называемыми
диаграммами качества.
,
так, чтобы
и
удовлетворяли заданным требованиям,
то можно пользоваться так называемыми
диаграммами качества.