

Лекция 14. Устойчивость нелинейных управляемых систем. Критерий в.-м. Попова.
Мы будем рассматривать собственные колебания нелинейной управляемой системы, описываемой следующими дифференциальными уравнениями
 ,
,
![]() ,
,
![]() ,
(1)
,
(1)
 ,
,
где
функция
![]() удовлетворяет условию
удовлетворяет условию
![]() .
(2)
.
(2)
Систему уравнений (1) можно переписать так
 ,
. (3)
,
. (3)
Если ввести матрицы
 ,
,
 ,
,
 ,
,
![]() (4)
(4)
и
обозначить через
![]() оператор дифференцирования по времени,
то есть
оператор дифференцирования по времени,
то есть
 ,
то можно заменить систему дифференциальных
уравнений (3) векторным уравнением
,
то можно заменить систему дифференциальных
уравнений (3) векторным уравнением
![]() ,
(5)
,
(5)
где
через
![]() обозначена единичная матрица.
обозначена единичная матрица.
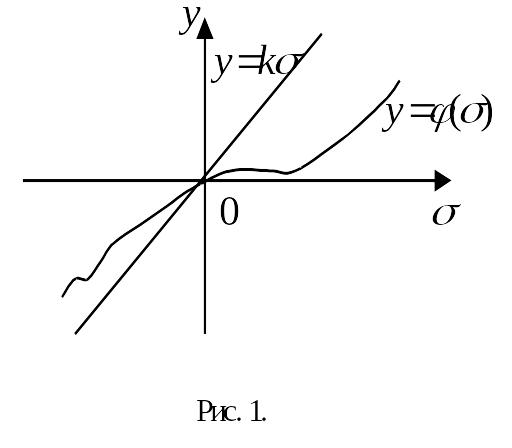
В дополнение к условию (2) будем считать, что функция такова, что её график не выходит из угловой области, показанной на рис. 1,то есть
 .
(6)
.
(6)
При
![]() условие (6) сводится к неравенству
условие (6) сводится к неравенству
![]() .
.
При векторное уравнение (5) принимает вид
![]() .
(7)
.
(7)
Дифференциальному уравнению (7) соответствует характеристическое уравнение
![]() ,
(8)
,
(8)
где
![]() .
(9)
.
(9)
Случай, когда все корни характеристического уравнения (8) расположены на плоскости комплексного переменного левее мнимой оси, то есть
![]() ,
,
,
,
будем называть основным случаем. Ниже мы ограничемся рассмотрением лишь основного случая.
Систему уравнений (1) можно в векторной форме записать так
![]() ,
,
,
,
![]() . (10)
. (10)
Исключая x из уравнений (10), получим следующее уравнение
![]() .
(11)
.
(11)
Обозначим теперь
![]() .
(12)
.
(12)
Уравнение (11) примет вид
![]() .
(13)
.
(13)
Матрица
![]() может быть записана так
может быть записана так
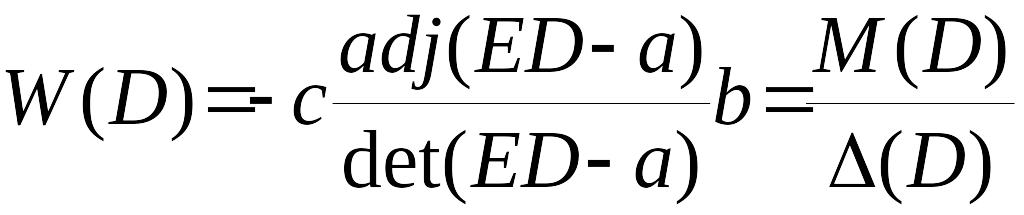 .
(14)
.
(14)
Из выражения (14) видно, что функция представляет собой скалярную дробно-рациональную функцию, у которой степень числителя ниже степени знаменателя.
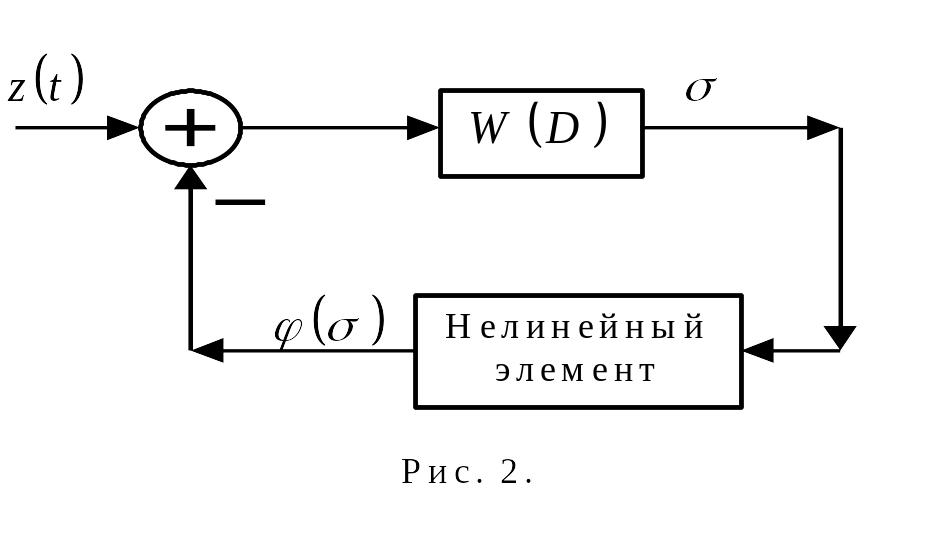
Интерпретация функции .
Управляемой
системе, собственные колебания которой
описываются уравнениями (1), можно
поставить в соответствие структурную
схему, изображенную на рис. 2. Схема на
рис. 2 представляет собой замкнутую
управляемую систему, у которой в цепь
обратной связи включен нелинейный
элемент. Через
![]() обозначен входной сигнал системы.
обозначен входной сигнал системы.
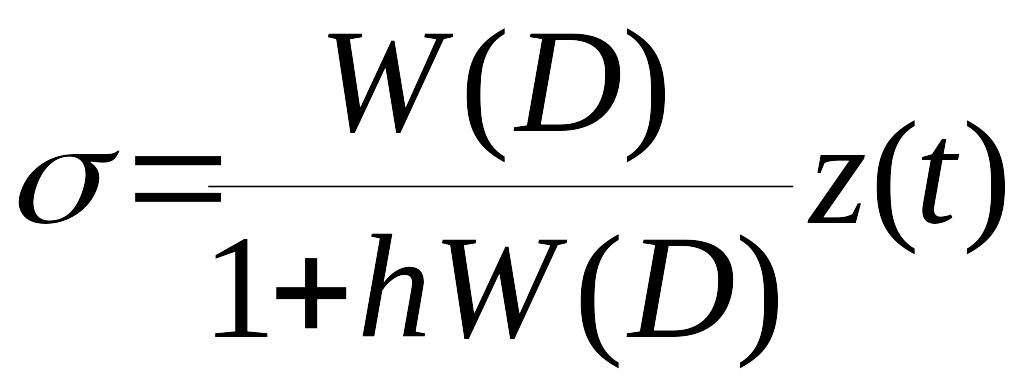
Рассматриваемая система будет описываться уравнением
![]() ,
(15)
,
(15)
откуда следует,что
![]() .
(16)
.
(16)
В частном случае, когда
![]() ,
(17)
,
(17)
уравнение (16) принимает следующий вид
![]() ,
(18)
,
(18)
или
 .
(19)
.
(19)
Так как согласно (14)
 ,
(20)
,
(20)
то уравнение (19) можно переписать так
![]() .
(21)
.
(21)
Собственные
колебания замкнутой управляемой системы
при
![]() будут описываться однородным уравнением,
которое получается из уравнения (21) при
будут описываться однородным уравнением,
которое получается из уравнения (21) при
![]()
![]() .
(22)
.
(22)
Характеристическое уравнение, соответсвующее дифференциальному уравнению (22), будет следующим
 .
(23)
.
(23)
В
рассматриваемом здесь основном случае
все нули полинома
![]() расположены в левой полуплоскости
комплексного переменного
.
Поэтому для того, чтобы при
замкнутая управляемая система была
асимптотически устойчивой, то есть
характеристическое уравнение (23) не
имело корней В правой полуплоскости
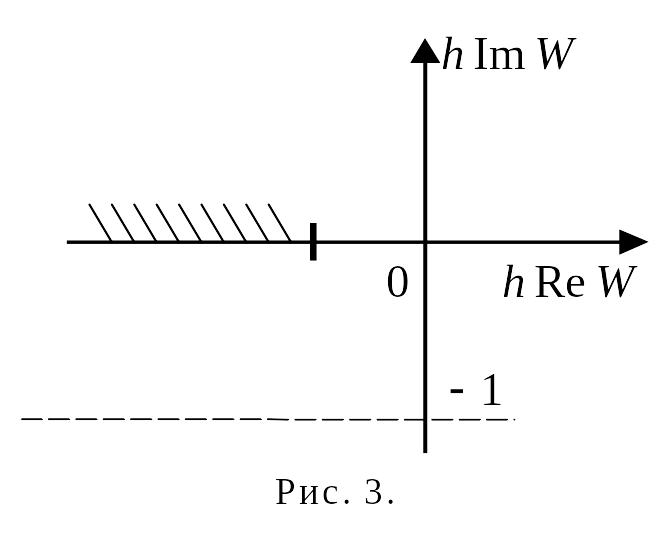
,достаточно
в соответствии с критерием Найквиста,
чтобы годограф вектора
расположены в левой полуплоскости
комплексного переменного
.
Поэтому для того, чтобы при
замкнутая управляемая система была
асимптотически устойчивой, то есть
характеристическое уравнение (23) не
имело корней В правой полуплоскости
,достаточно
в соответствии с критерием Найквиста,
чтобы годограф вектора
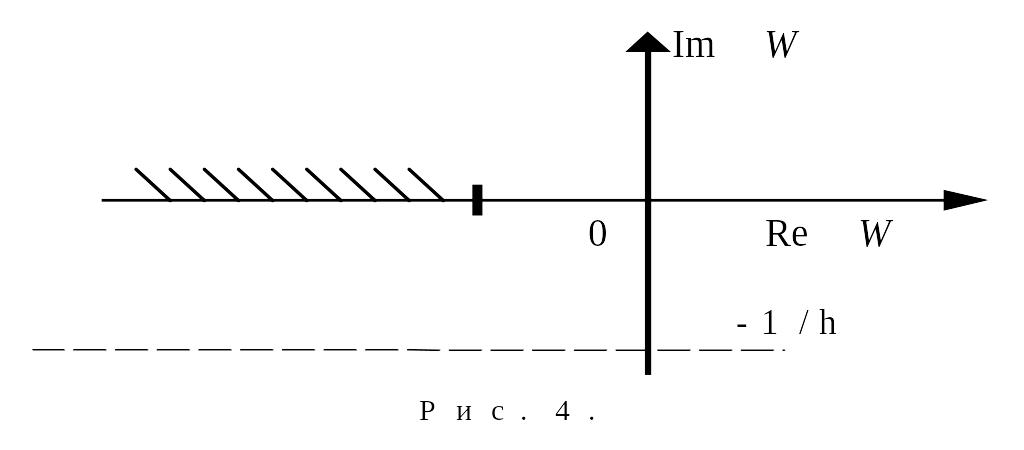
![]() не пересекал полуотрезка
не пересекал полуотрезка
![]() (рис. 3) , или годограф вектора
(рис. 3) , или годограф вектора
![]() не пересекал полуотрезка
не пересекал полуотрезка
 (рис.4).
(рис.4).
Так
как функции
удовлетворяют условию (6), то принадлежащие
к этому классу линейные функции
![]() удовлетворяют условию
удовлетворяют условию
![]() ,
или
,
или
 (24)
(24)
Поэтому
для того, чтобы замкнутая управляемая
система была асимптотически устойчивой
при любой функции
,
где
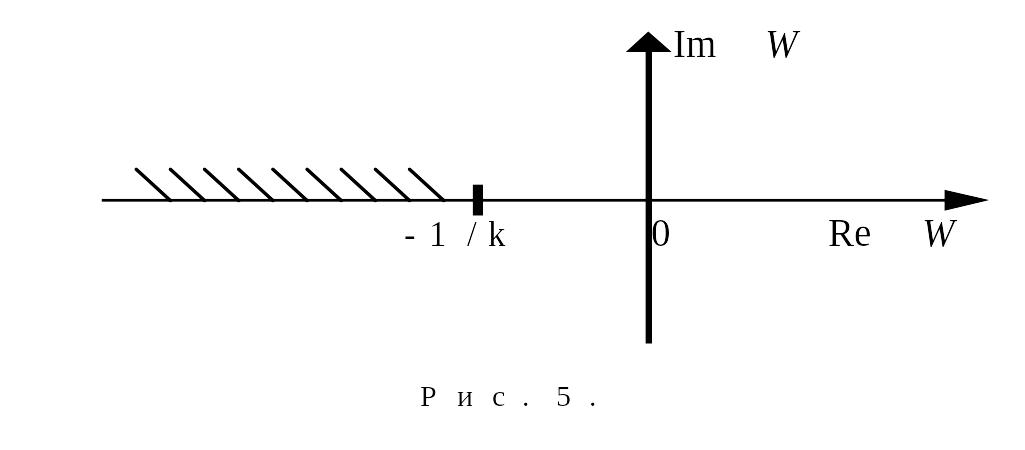
![]() ,
необходимо и достаточно, чтобы годограф
вектора
не пересекал полуотрезка
,
необходимо и достаточно, чтобы годограф
вектора
не пересекал полуотрезка
 (рис 5). В случае, когда
,
имеем
(рис 5). В случае, когда
,
имеем
![]() ,
то есть запретной зоной будет интервал
,
то есть запретной зоной будет интервал
![]() .
Само начало координат в запретную зону
не включается, ибо мы рассматриваем
функции
с любым, сколь угодно большим, но конечным
значением
.
Само начало координат в запретную зону
не включается, ибо мы рассматриваем
функции
с любым, сколь угодно большим, но конечным
значением
![]() .
.