Математические модели нелинейных элементов систем автоматического управления.
Статические нелинейные элементы – это такие элементы системы автоматического управления, выходная переменная которых не зависит от скорости изменения входной величины.
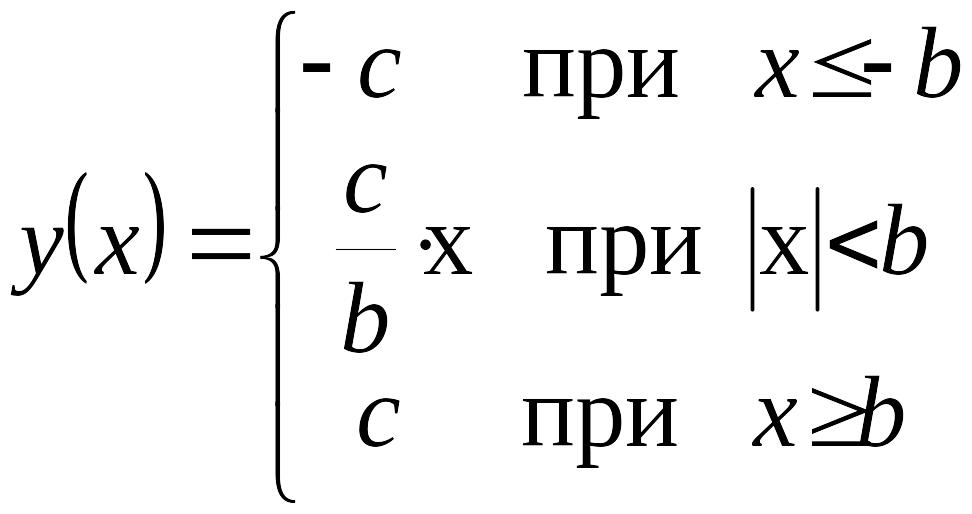
Характеристика с насыщением (ограничение).
Характеристика нелинейного звена типа "Ограничение".

Уравнение нелинейного звена типа "Ограничение"
 .
.
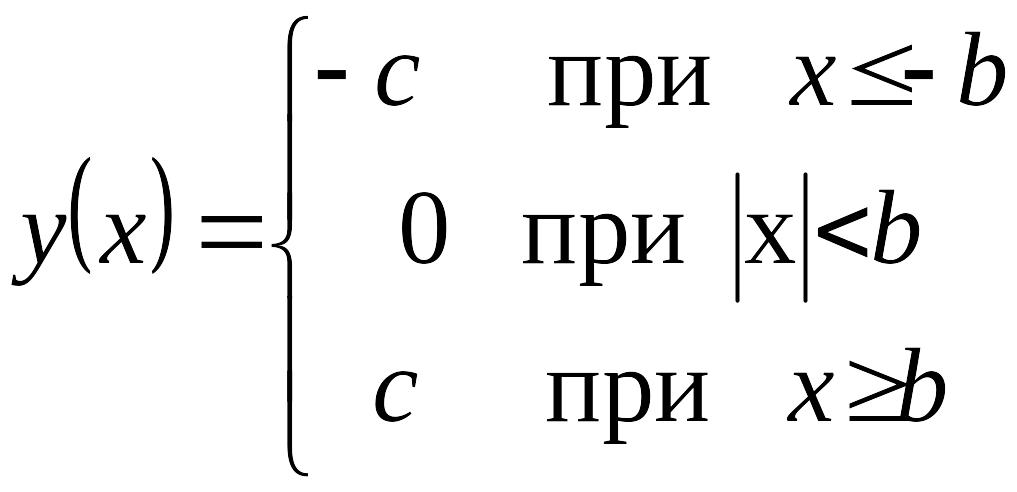
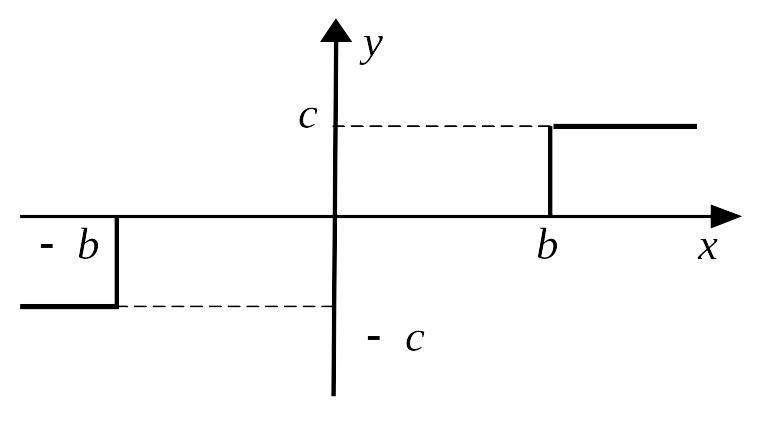
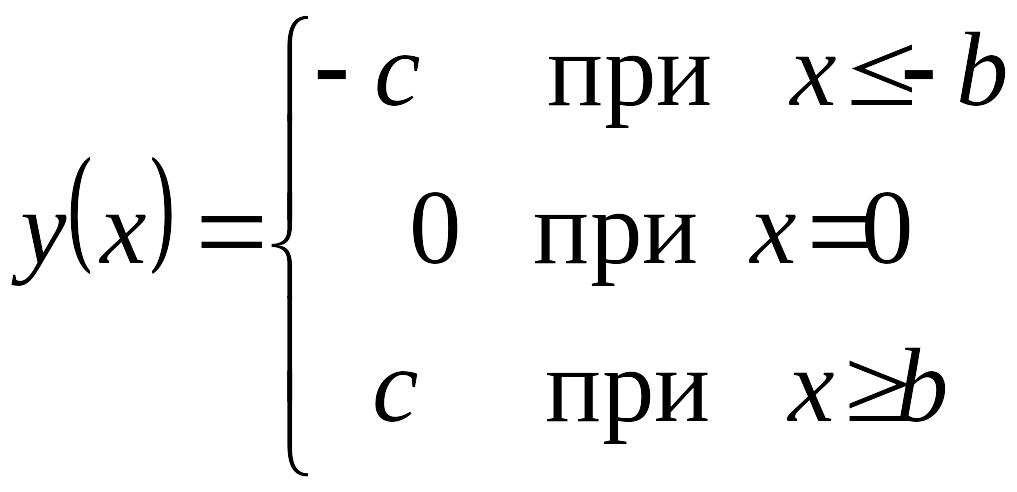
2. Реле с зоной нечувствительности.
Уравнение нелинейного звена типа "Реле с зоной нечувствительности"
 .
.
Характеристика нелинейного звена типа "Реле с зоной нечувствительности".
При
![]() получаем идеальную релейную характеристику
получаем идеальную релейную характеристику
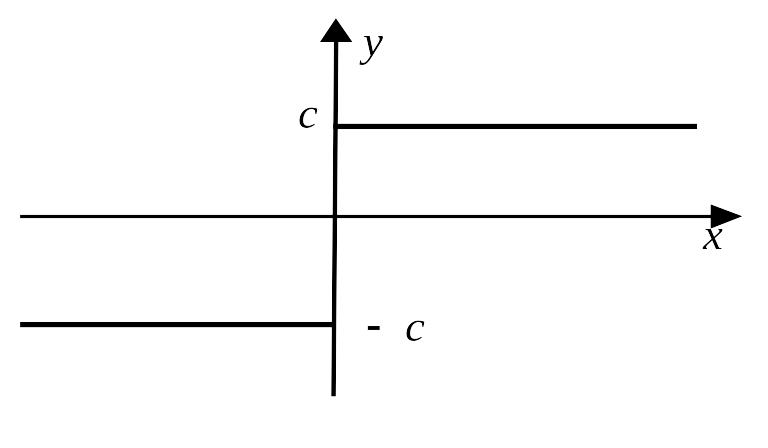
 .
.
Динамические нелинейные элементы – это такие элементы системы автоматического управления, выходная переменная которых зависит не только от величины входного воздействия, но и от скорости его изменения.
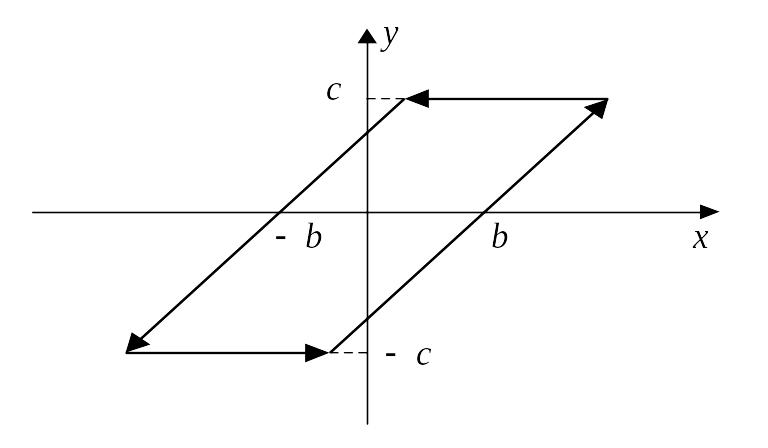
3. Реле с гистерезисом.
Характеристика нелинейного звена типа "Реле с гистерезисом"
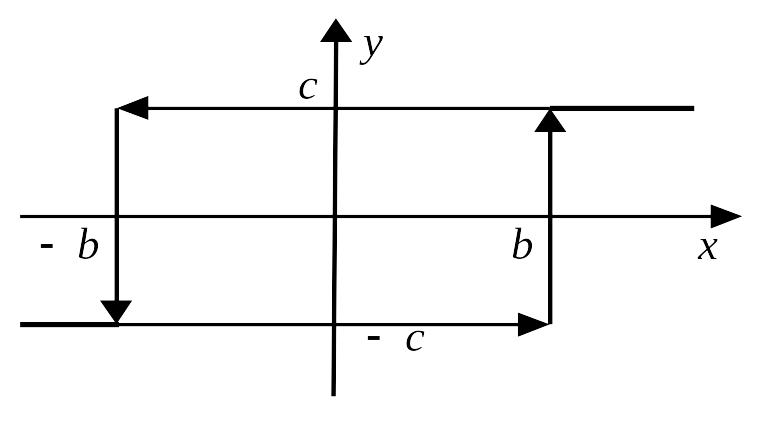
Уравнение нелинейного звена типа "Реле с гистерезисом"
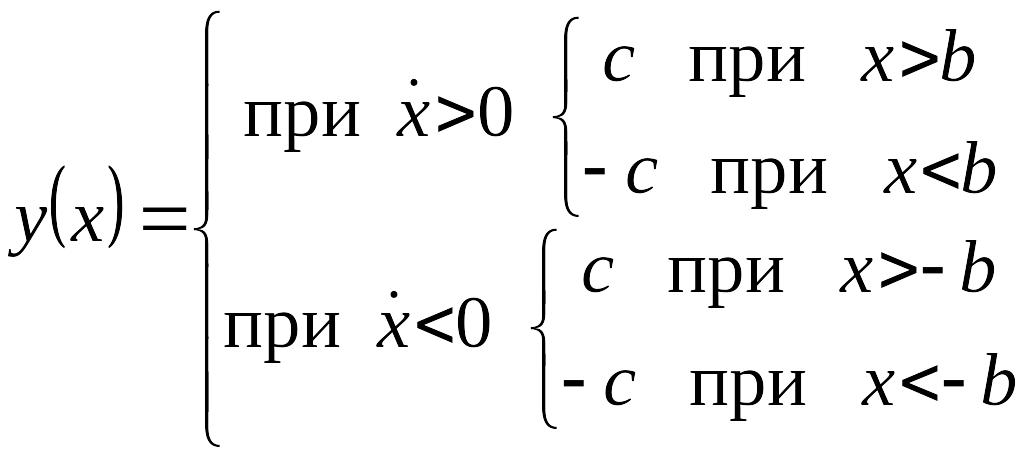 .
.
4. Нелинейное звено типа "Люфт".
Характеристика нелинейного звена типа "Люфт"
Уравнение нелинейного звена типа "Люфт"
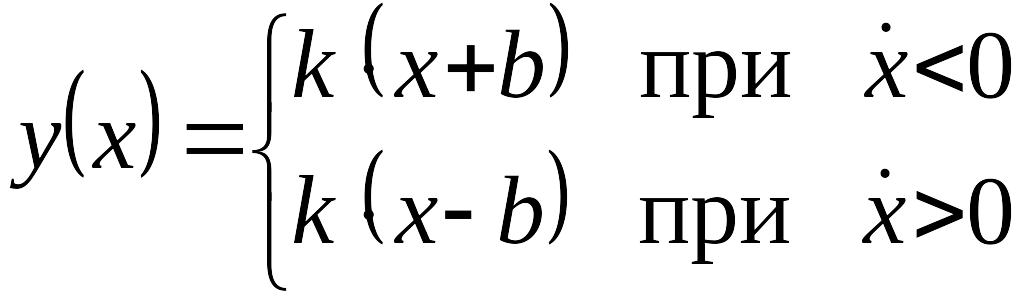 ,
,
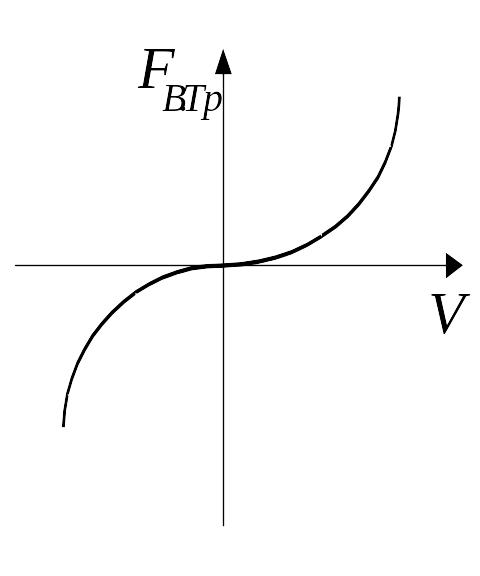
5. Нелинейное звено типа "Вязкое трение".
При движении объекта управления в жидкой среде на него действует сила вязкого трения, которая пропорциональна квадрату скорости движения объекта.
Уравнение нелинейного звена типа "Вязкое трение"
![]()
где
![]() – скорость движения объекта;
– скорость движения объекта;
![]() – коэффициент пропорциональности.
Направление
– коэффициент пропорциональности.
Направление
![]() противоположно скорости движения
объекта.
противоположно скорости движения
объекта.
Характеристика нелинейного звена типа "Вязкое трение".
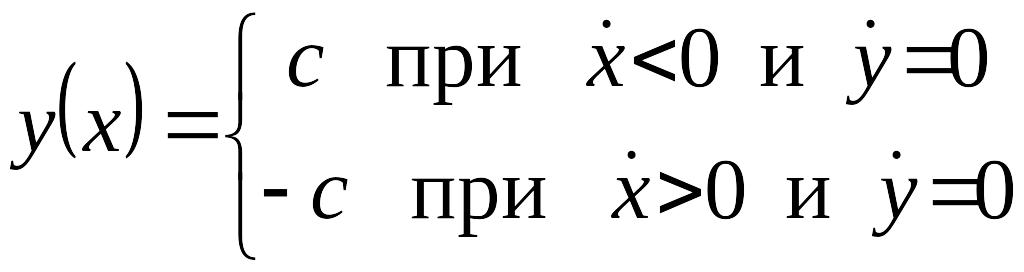
6. Нелинейное звено типа "Сухое трение".
Зависимость силы сухого трения от скорости имеет вид, показанный на рисунке
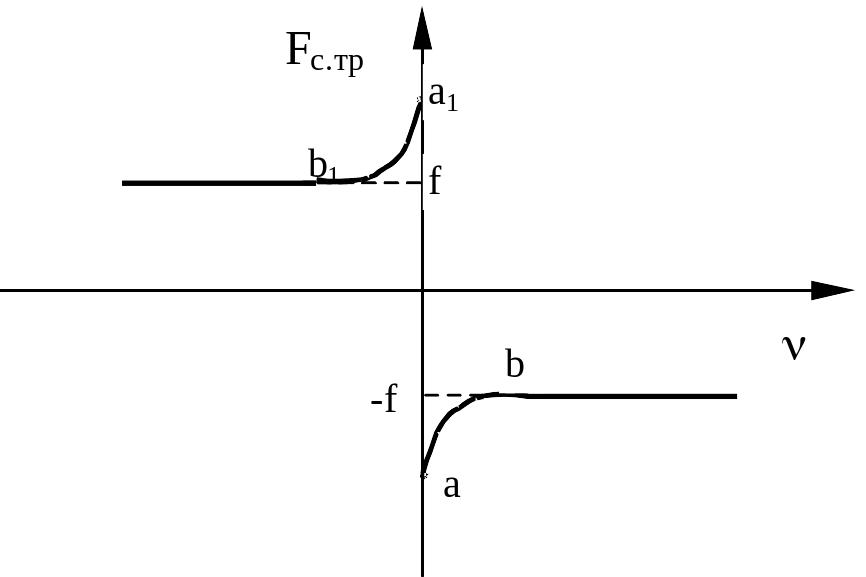
Иногда
спад характеристики (участки
![]() –
–
![]() и
и
![]() –
–
![]() )
на кривой зависимости силы трения от
скорости является причиной неустойчивости
системы. Если этот спад характеристики
не играет существенной роли, то
целесообразно упростить зависимость
силы сухого трения от скорости
,
например так, как показано на рисунке
)
на кривой зависимости силы трения от
скорости является причиной неустойчивости
системы. Если этот спад характеристики
не играет существенной роли, то
целесообразно упростить зависимость
силы сухого трения от скорости
,
например так, как показано на рисунке
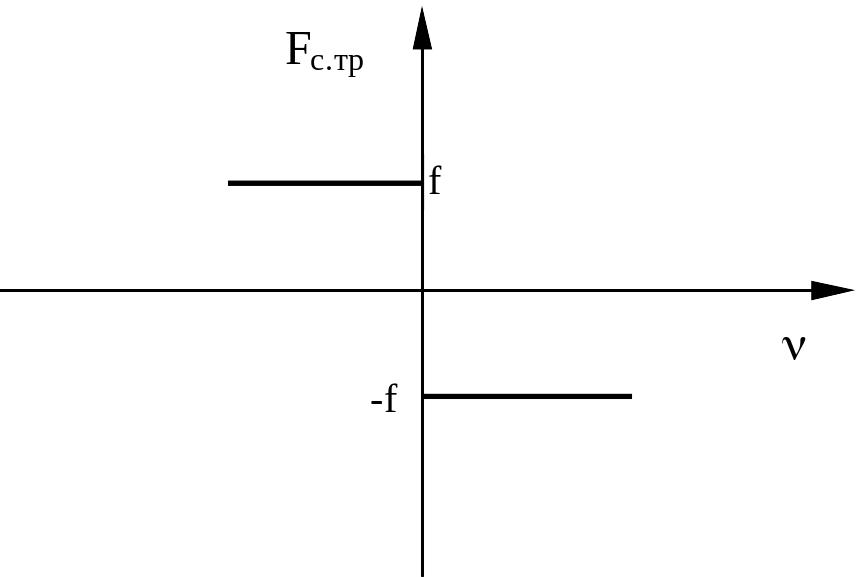
Математическая модель нелинейной характеристики типа "сухое трение" в этом случае будет иметь вид
![]() .
.
Лекция 2. Основные особенности нелинейных систем автоматического управления
Не выполняется принцип суперпозиции для математических моделей нелинейных систем автоматического управления. Правила преобразования структурных схем, аналогичных для линейных систем, в общем случае не существуют.
Так не существуют общие методы решения нелинейных дифференциальных уравнений то, как правило, исследования нелинейных систем носит качественный, приближенный характер.
Процессы в нелинейных системах автоматического управления могут существенно зависеть от
начальных условий (существенное отличие от линейных систем),
вида входного воздействия.
В одной и той же нелинейной системе при разных начальных условиях и входных воздействиях процессы в системе могут быть:
- устойчивыми
- неустойчивыми
- более сложные виды процессов, не характерных для линейных систем (автоколебания - это устойчивые собственные колебания с постоянной амплитудой при отсутствии внешних колебательных, гармонических воздействий; скользящие процессы и др.).
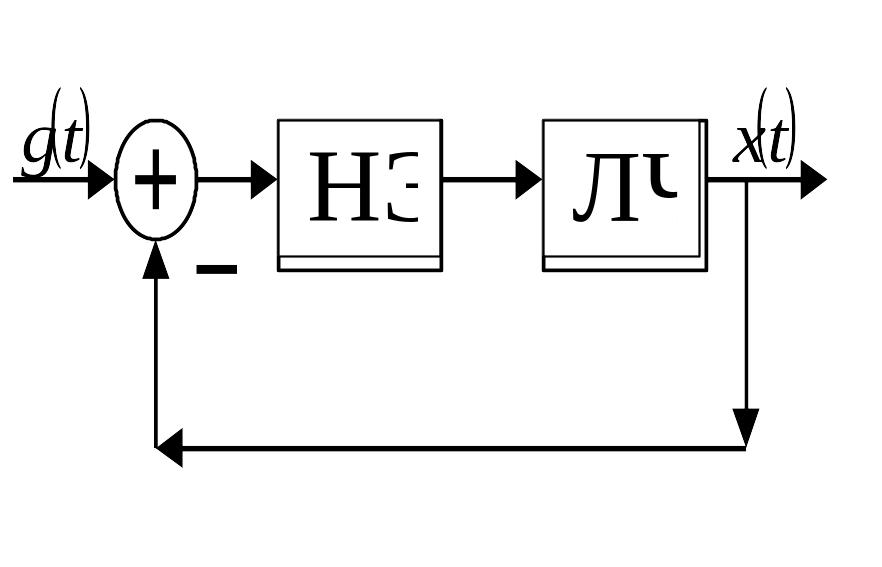
Мы будем рассматривать класс нелинейных систем, который характеризуется следующими особенностями:
В системе автоматического управления можно выделить линейную часть (ЛЧ) – это составная часть системы, которая описывается линейными дифференциальными уравнениями.
В системе управления можно выделить единственный нелинейный элемент (Н.Э.).
Структурную схему системы управления можно представить следующим образом
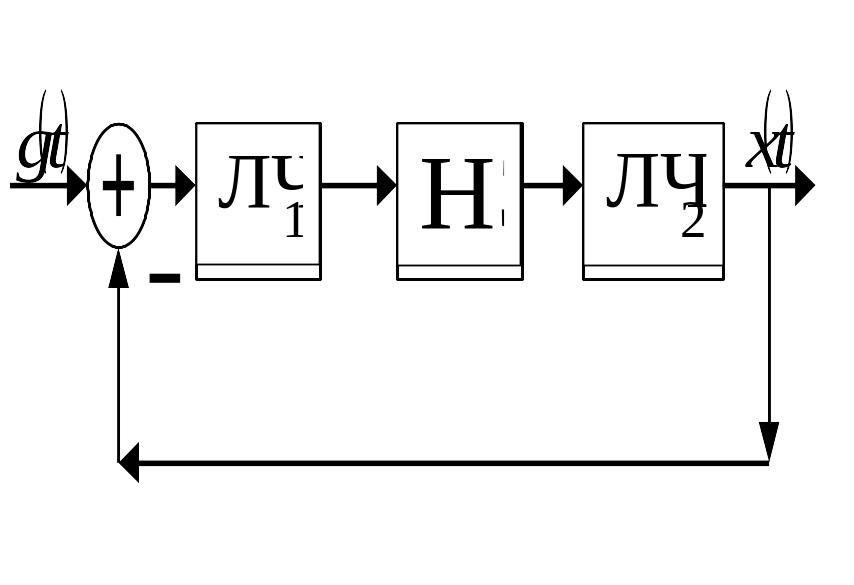
либо