

Лекция 13. Исследование устойчивости нелинейных систем. Определение устойчивости, функции ляпунова.
Общее определение понятия устойчивости любой динамической системы по Ляпунову выглядит следующим образом. Запишем уравнения динамики нелинейной системы - ого порядка в нормальной форме Коши
 ,
,
![]() (1)
(1)
при отсутствии возмущающих воздействий. Устойчивость рассматривается как свойство свободного движения системы после начального отклонения ее, вызванного любыми причинами.
Пусть
![]() обозначает некоторый установившийся
процесс работы системы или, как говорят,
невозмущенное движение. Отклонение
возмущенного движения
обозначает некоторый установившийся
процесс работы системы или, как говорят,
невозмущенное движение. Отклонение
возмущенного движения
![]() ,
определяемого уравнениями (1) при
определенных начальных условиях
,
определяемого уравнениями (1) при
определенных начальных условиях
![]() ,
обозначим через
,
т.е.
,
обозначим через
,
т.е.
![]() ,
. (2)
,
. (2)
Тогда можно написать уравнения возмущенного движения в отклонениях в виде
 ,
, (3)
,
, (3)
а
невозмущенное движение будет
![]() .
Переменные
.
Переменные
![]() являются координатами состояния системы.
являются координатами состояния системы.
В общем случае конкретное выражение уравнений (3) зависит от вида установившегося процесса , так как они получаются из (1) подстановкой (2). Поэтому, исследуя уравнения, вообще говоря, необходимо указывать – об устойчивости какого установившегося режима или невозмущенного движения идет речь.
Геометрически,
невозмущенное (установившееся) движение
![]() системы
- ого порядка можно представить условно
в
-мерном
пространстве с добавлением еще оси
времени
(рис. 1) в виде некоторой интегральной
кривой. Возмущенное движение
,
вызванное начальным отклонением при
системы
- ого порядка можно представить условно
в
-мерном
пространстве с добавлением еще оси
времени
(рис. 1) в виде некоторой интегральной
кривой. Возмущенное движение
,
вызванное начальным отклонением при
![]() ,
изобразится другой интегральной кривой
(рис. 1).
,
изобразится другой интегральной кривой
(рис. 1).
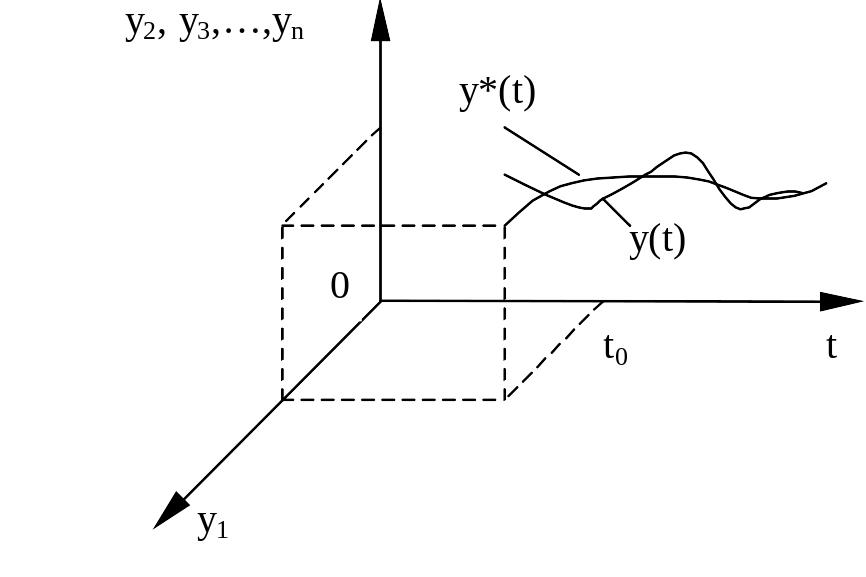
Рис. 1.
В отклонениях , т.е. в пространстве координат состояния системы, эта картина возмущенного движения будет выглядеть, как показано на рисунке 2. При этом невозмущенное движение изобразится прямой линией, совпадающей с осью .
Рис. 2.
Невозмущенное
движение системы
![]() называется устойчивым, если, задав
«трубку» сколь угодно малого
-мерного
сечения
называется устойчивым, если, задав
«трубку» сколь угодно малого
-мерного
сечения
![]() (рис. 2), можно подобрать в начальный
момент
такую область начальных условий
(рис. 2), можно подобрать в начальный
момент
такую область начальных условий
![]() ,
зависящую от
,
что в дальнейшем с увеличением
возмущенное движение
не выйдет из заданной трубки
.
,
зависящую от
,
что в дальнейшем с увеличением
возмущенное движение
не выйдет из заданной трубки
.
Аналитическое определение понятия устойчивости по Ляпунову формулируется следующим образом.
Невозмущенное
движение системы
называется устойчивым, если при заданном
![]() ,
сколь бы оно мало ни было, существует
такое
,
сколь бы оно мало ни было, существует
такое
![]() ,
зависящее от
,
что при начальных условиях
,
зависящее от
,
что при начальных условиях
![]() ,
,
![]() , (4)
, (4)
в
дальнейшем движении
![]() будет все время
будет все время
![]() ,
. (6.5)
,
. (6.5)
Заметим, что в этом аналитическом определении области и , в отличие от рис. 2 выглядят "прямоугольными" (в n-мерном пространстве), что не имеет принципиального значения.
Невозмущенное
движение
будет неустойчивым, если указанное
условие не выполняется хотя бы для
одного из
![]() .
.
Если
при выполнении указанного выше определения
имеем
![]() ,
то невозмущенное движение
называется асимптотически устойчивым.
,
то невозмущенное движение
называется асимптотически устойчивым.
Если же после любых больших начальных отклонений, то система называется устойчивой в целом.
Существует еще понятие абсолютной устойчивости, означающее устойчивость системы в целом при любом очертании нелинейности внутри определенного класса нелинейностей.
В общем случае в нелинейных системах, в отличие от линейных устойчивость состояния равновесия не означает, что будут устойчивы и все процессы в системе, так как свойства нелинейной системы меняются с изменением размера отклонений координат состояния. Наглядным примером может служить наличие в системе второго порядка неустойчивого предельного цикла . В этом случае при устойчивом состоянии равновесия система оказывается неустойчивой при больших начальных отклонениях (выходящих за границу предельного цикла), т.е. система устойчива "в малом" и неустойчива "в большом".
При определении понятия устойчивости рассматривались интегральные кривые (рис. 1 и 2), Если же представить себе не интегральную кривую, а фазовую траекторию в -мерном пространстве для системы уравнений (3), то в устойчивой системе согласно определению она будет иметь вид, изображенный на рис. 3.

Рис. 3.
Далее
придется иметь дело с непрерывными
функциями координат состояния системы
![]() обладающими свойством
обладающими свойством
![]() при
при
![]() .
.
Такая
функция
называется знакоопределенной функцией
если во всей рассматриваемой области
окружающей начало координат, она
сохраняет один и тот же знак и обращается
в нуль только в точке начала координат.
Например, при
![]()
![]() .
.
Знакоопределенная функция может быть положительноопределенной или отрицательноопределенной
Если
же функция
сохраняет один и тот же знак, но обращается
в нуль не только в начале координат, то
такая функция называется знакопостоянной
(положительной или отрицательной).
Например, при
![]() обращается в нуль на прямой
обращается в нуль на прямой
![]() и
и
![]() .
.
Наконец,
функция
будет знакопеременной, если обращаясь
в нуль в начале координат (и не только),
она в рассматриваемой области не
сохраняет одного и того же знака.
Например,
![]() .
.
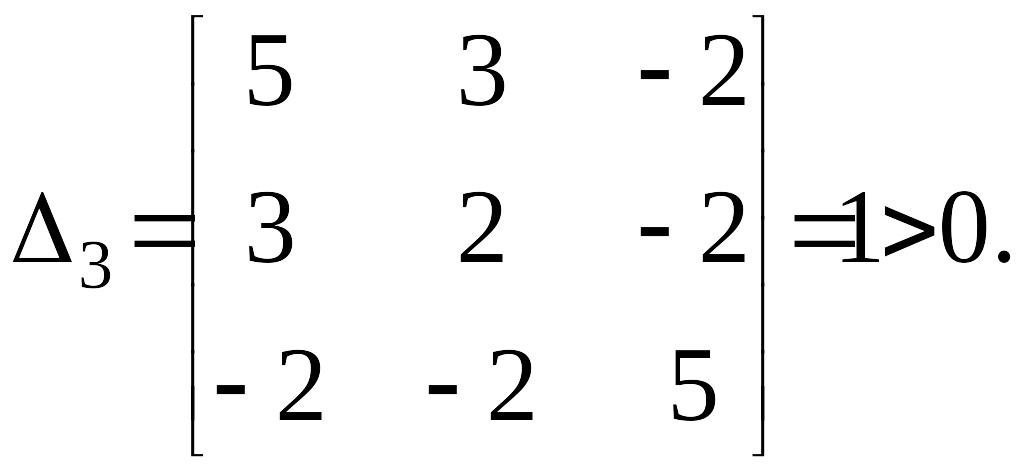
Согласно известному критерию Сильвестра, любая квадратичная форма координат будет знакоопределенной (положительной) тогда и только тогда, когда все главные диагональные миноры матрицы ее коэффициентов будут положительны. Например,
![]()
будет положительноопределенной, так как для матрицы ее коэффициентов
имеем
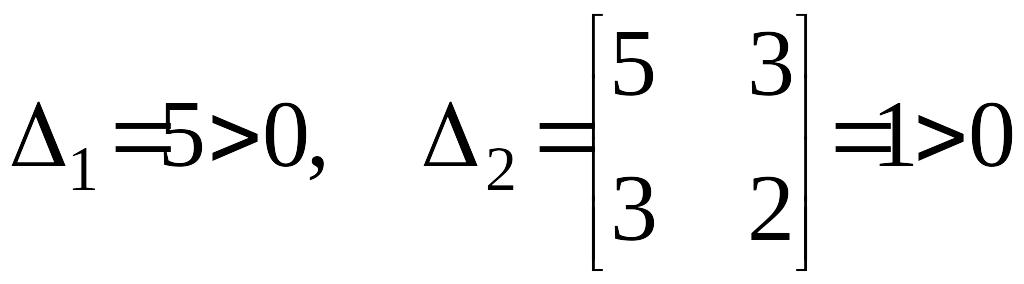
и, наконец,
Описанные функции от координат состояния системы, обращающиеся в нуль в начале координат, играют важную роль в теоремах Ляпунова об устойчивости и неустойчивости нелинейных систем и называются функциями Ляпунова.
Пусть имеется нелинейная система, описываемая уравнениями динамики
 (6)
(6)
Составим производную функции Ляпунова в силу уравнений системы
 .
.
Используя уравнение (6), найдем
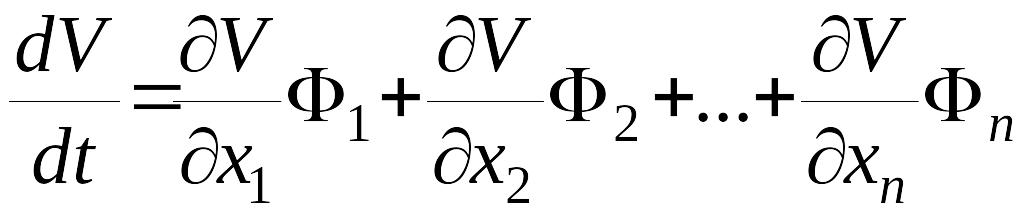 .
(7)
.
(7)
Очевидно, что в результате тут получается тоже некоторая функция координат состояния системы
 .
(8)
.
(8)
Известно далее, что градиент функции есть вектор, определяемый следующими проекциями
 .
.
Можно
ввести вектор
![]() с проекциями, отвечающими уравнениям
(6), а именно
с проекциями, отвечающими уравнениям
(6), а именно
 .
.
Вектор будет вектором скорости изображающей точки в фазовом пространстве (рис. 4).
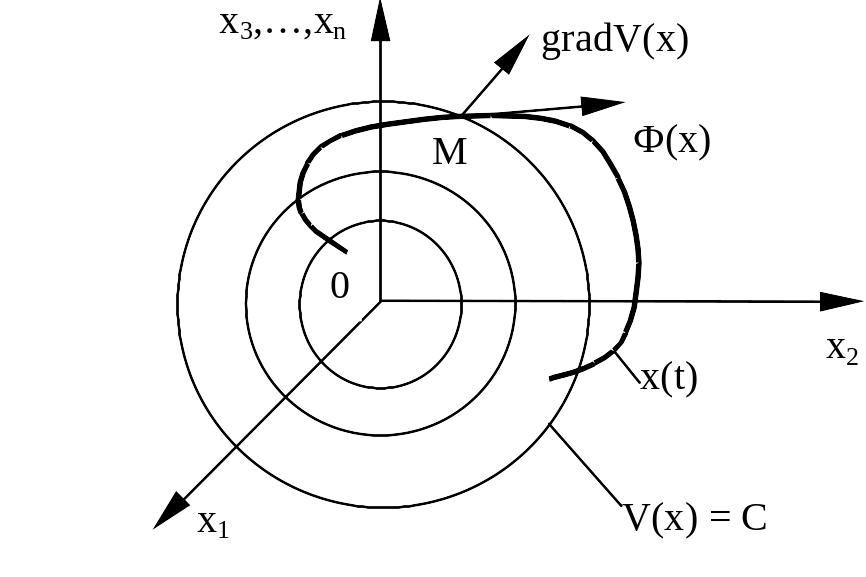
Рис. 4
Согласно (7) получаем
 ,
,
где
под
подразумевается совокупность всех
координат состояния системы
![]() .
.
Итак, производная функции Ляпунова, составленная в силу уравнений системы, представляет собой скалярное произведение градиента этой функций на вектор фазовой скорости.
Вектор
![]() перпендикулярен к поверхности
перпендикулярен к поверхности
![]() и направлен в сторону возрастания
значения
и направлен в сторону возрастания
значения
![]() (рис.4). Если
производная
(рис.4). Если
производная
![]() положительна, то согласно
(9) вектор
фазовой скорости
положительна, то согласно
(9) вектор
фазовой скорости
![]() составляет с
острый угол, т.е. фазовая траектория
пересекает поверхность
в сторону увеличения значений
составляет с
острый угол, т.е. фазовая траектория
пересекает поверхность
в сторону увеличения значений
![]() .
Если же
.
Если же
 ,
угол между
и
тупой, и фазовая траектория идет в
сторону уменьшения значений
.
,
угол между
и
тупой, и фазовая траектория идет в
сторону уменьшения значений
.