

Несимметричные автоколебания. Постоянные ошибки
Обратимся
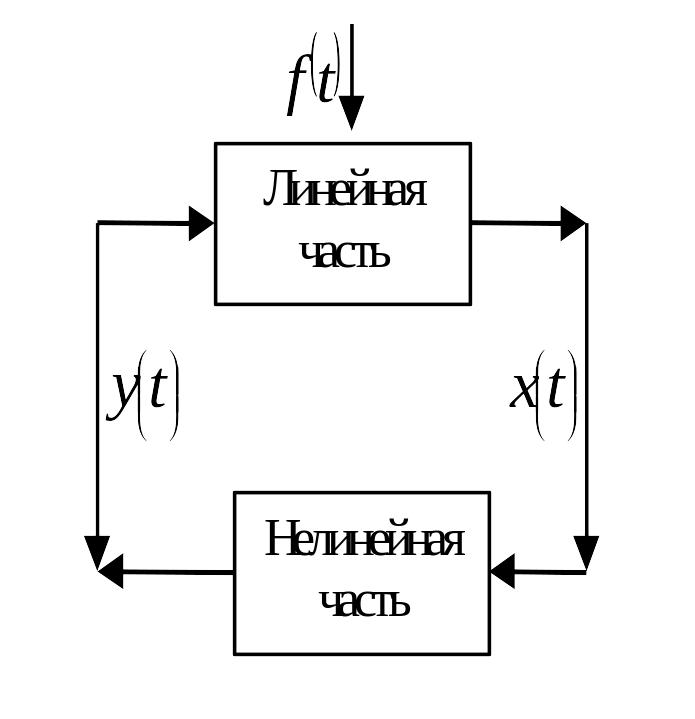
к нелинейной системе с внешним воздействием
![]() ,
блок - схема которой представлена на
рисунке
,
блок - схема которой представлена на
рисунке
Тогда уравнение динамики замкнутой системы будет иметь вид
![]() ,
(1)
,
(1)
где
операторный многочлен
![]() зависит от места приложения внешнего
воздействия. Положим правую часть
уравнения
(1) постоянной
зависит от места приложения внешнего
воздействия. Положим правую часть
уравнения
(1) постоянной
![]() .
(2)
.
(2)
Это может быть в следующих случаях
1)
![]()
2)
![]() ,
,
т.е. соответственно для систем без астатизма и с астатизмом.
Итак, рассмотрим уравнение системы в виде
![]() .
(3)
.
(3)
В этом случае за счет постоянной правой части уравнения появится постоянная составляющая в периодическом решении. Поэтому решение ищется в виде
 (4)
(4)
Величина
![]() характеризует постоянную статическую
или скоростную ошибку системы.
характеризует постоянную статическую
или скоростную ошибку системы.
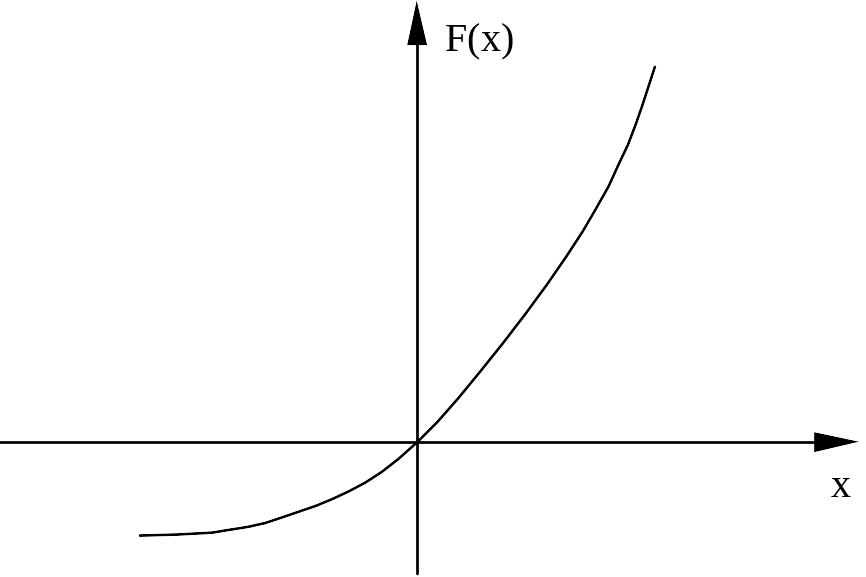
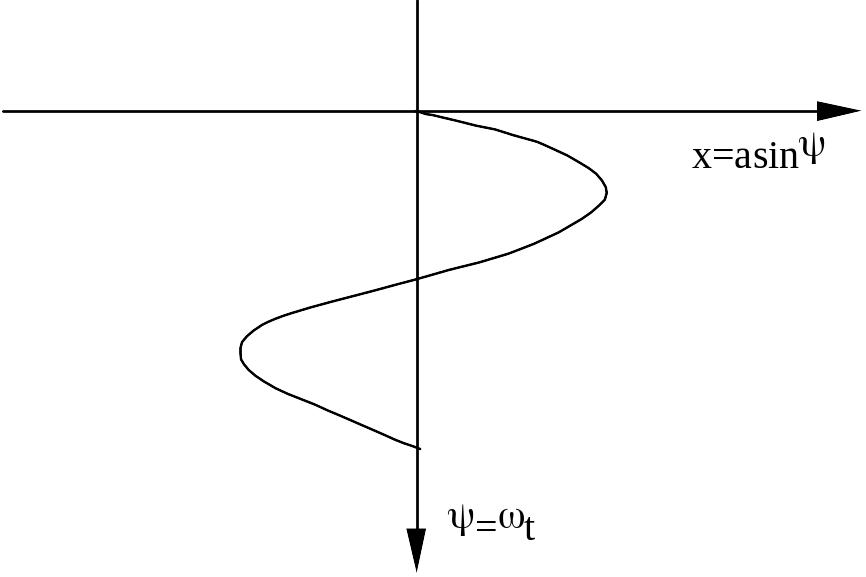
Однако несимметричные колебания могут иметь место и при отсутствии внешнего воздействия, т. е. в системе
![]() ,
(5)
,
(5)
если – нелинейное звено с несимметричной характеристикой. Это проиллюстрировано на рисунке.
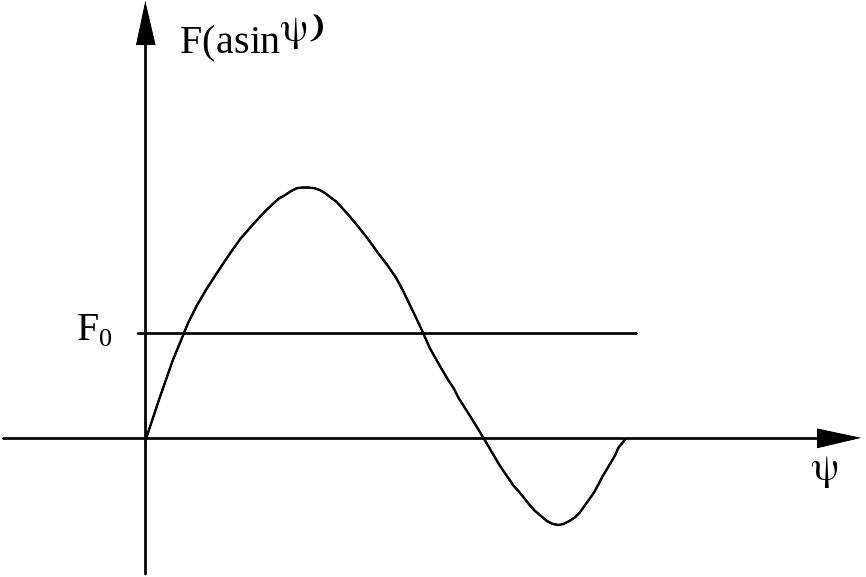
Постоянная
составляющая
![]() на выходе нелинейности возникает даже
при симметричном входе
на выходе нелинейности возникает даже
при симметричном входе
![]() .
Затем постоянная составляющая, вообще
говоря, пройдет на вход
через линейную часть системы и приведет
к решению вида
(4). Следовательно,
статическая ошибка в нелинейной системе
может иметь место и без внешнего
воздействия
– за счет
несимметрии нелинейности.
.
Затем постоянная составляющая, вообще
говоря, пройдет на вход
через линейную часть системы и приведет
к решению вида
(4). Следовательно,
статическая ошибка в нелинейной системе
может иметь место и без внешнего
воздействия
– за счет
несимметрии нелинейности.
Гармоническая линеаризация в случае несимметричных колебаний имеет вид
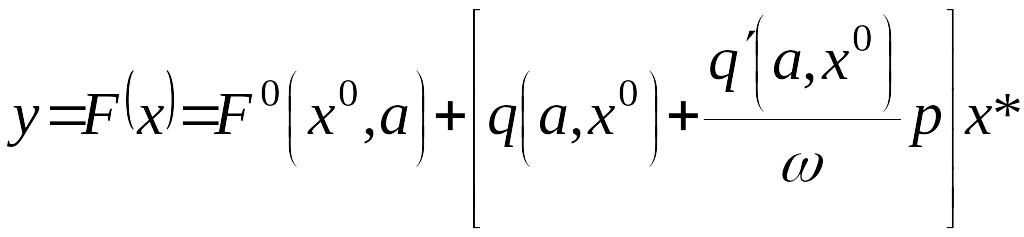 ,
(6)
,
(6)




где – постоянная составляющая
 ,
(7)
,
(7)
![]() и
и
![]() – коэффициенты гармонической линеаризации,
которые рассчитываются по формулам
– коэффициенты гармонической линеаризации,
которые рассчитываются по формулам
 ,
(8)
,
(8)
 ,
(9)
,
(9)
Подставим искомое решение (4) и результат гармонической линеаризации нелинейности (6) в заданное уравнение системы (3)
 .
.
Выделим отсюда уравнение для постоянных составляющей
![]() (10)
(10)
и уравнение для периодических составляющих
 .
(11)
.
(11)
Видно, что постоянная составляющая и колебательная составляющая определяются не в отдельности, а только путем совместного решения этих уравнений. Сначала из алгебраического уравнения (10) можно определить зависимость
![]() ,
(12)
,
(12)
Затем
подставить эту зависимость в выражения
![]() и
и
![]() ,
имеющиеся для заданной нелинейности.
Тогда получатся новые выражения и
графики для
и
,
имеющиеся для заданной нелинейности.
Тогда получатся новые выражения и
графики для
и
![]() ,
включающие зависимость
(12). В
результате уравнение
(11) приводится
к виду
,
включающие зависимость
(12). В
результате уравнение
(11) приводится
к виду
 ,
(13)
,
(13)
Методика решения задачи по определению и остается прежней, но с новыми выражениями и графиками для и .
Замечание. Определение функции (12) упрощается в двух случаях, а именно
<1>
при несимметричной нелинейности и без
внешнего воздействия вместо
(10) имеем
![]()
<2>
при наличии нулевого полюса в передаточной
функции линейной части
![]() ,
вместо (10)
в общем случае получаем
,
вместо (10)
в общем случае получаем
![]() ,
а без внешнего воздействия, при
несимметричной нелинейности
,
а без внешнего воздействия, при
несимметричной нелинейности
![]() .
.
Определение
из уравнения (11) периодической составляющей
![]() , т.е. значений
и
,
упрощается в случае однозначной нечетной
симметричной нелинейности
.
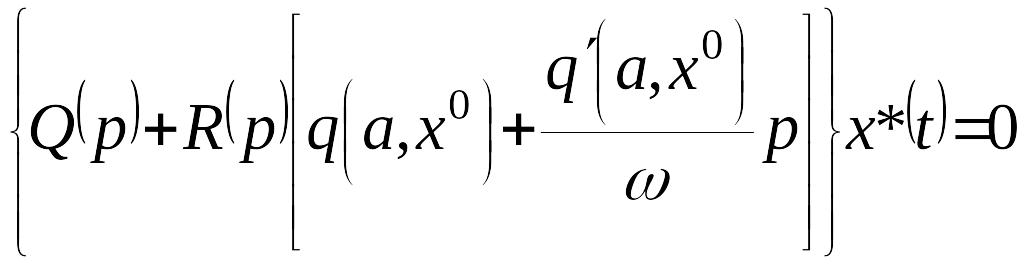
В этом случае, согласно (11) характеристическое
уравнение получает вид
, т.е. значений
и
,
упрощается в случае однозначной нечетной
симметричной нелинейности
.
В этом случае, согласно (11) характеристическое
уравнение получает вид
![]() ,
(14)
,
(14)
а после подстановки придем к уравнениям
 ,
,
![]() .
.
Из этих уравнений (аналогично тому как это было сделано для симметричных автоколебаний) получаем
![]() ,
(15)
,
(15)
где
![]() относится
к симметричным автоколебаниям в той же
системе.
относится
к симметричным автоколебаниям в той же
системе.
Сделав подстановку (12), будем иметь уравнение
![]() ,
(16)
,
(16)
где – новое выражение или график, учитывающий зависимость (12).
Таким
образом, при однозначной нелинейности
частота
,
несимметричных
автоколебаний остается такой же, как и
при симметричных колебаниях, независимо
от величины смещения
.
Амплитуда же несимметричных колебаний
,
определим из уравнения (15), зависит от
смещения
и выражается через амплитуду симметричных
автоколебаний
![]() .
Здесь требуется решать уравнение (11).
.
Здесь требуется решать уравнение (11).