

Лекция 12. Устойчивость периодического решения
Рассмотрим характеристическое уравнение гармонически линеаризованной системы управления
 .
(1)
.
(1)
Пусть
найдены все значения
![]()
![]() ,
которые соответствуют периодическим
решениям. Для того чтобы определить
соответствует ли найденное периодическое
решение автоколебаниям в нелинейных
системах управления, нужно исследовать
их на устойчивость. При практических
расчетах исследование устойчивости
периодического решения проводится
гармонически линеаризованной системы
используя критерии устойчивости,
разработанные для линейных систем
управления.
,
которые соответствуют периодическим
решениям. Для того чтобы определить
соответствует ли найденное периодическое
решение автоколебаниям в нелинейных
системах управления, нужно исследовать
их на устойчивость. При практических
расчетах исследование устойчивости
периодического решения проводится
гармонически линеаризованной системы
используя критерии устойчивости,
разработанные для линейных систем
управления.
Применение критерия Михайлова для исследования устойчивости периодического решения.
Уравнение для построения кривой Михайлова получаем из характеристического уравнения (1) путем подстановки в него , т.е.
![]()
Выделим в последнем равенстве действительную и мнимую части
![]() .
(2)
.
(2)
Известно,
что для случая периодического решения,
т.е. при наличии пары чисто мнимых корней
![]() в характеристическом уравнении, кривая
Михайлова проходит через начало
координат, причем в точке кривой
совпадающей с началом координат, параметр
равняется абсолютной величине мнимого
корня
в характеристическом уравнении, кривая
Михайлова проходит через начало
координат, причем в точке кривой
совпадающей с началом координат, параметр
равняется абсолютной величине мнимого
корня
![]() – частоте периодического решения.
– частоте периодического решения.
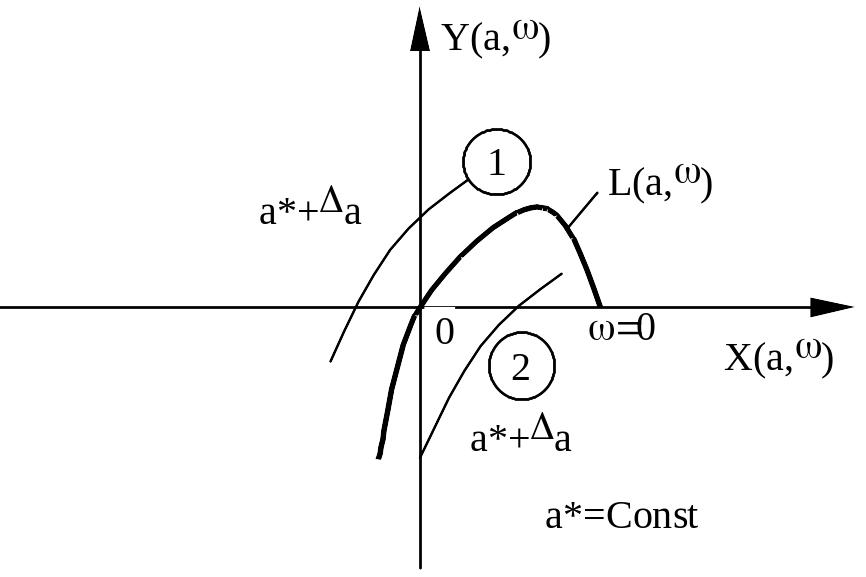
Дадим
малое отклонение амплитуды
![]() .
Вследствие чего изменятся коэффициенты
в равенстве (2) и кривая Михайлова
отклонится от начала координат в ту или
другую сторону. Если кривая Михайлова
займет положение (1) (см. рисунок), то, как
известно из линейной теории управления,
в системе будут затухающие колебательные
процессы. Если кривая Михайлова займет
положение (2) (см. рисунок), то как, известно
из линейной теории управления, в
исследуемой системе будут иметь место
расходящиеся процессы – система
неустойчива.
.
Вследствие чего изменятся коэффициенты
в равенстве (2) и кривая Михайлова
отклонится от начала координат в ту или
другую сторону. Если кривая Михайлова
займет положение (1) (см. рисунок), то, как
известно из линейной теории управления,
в системе будут затухающие колебательные
процессы. Если кривая Михайлова займет
положение (2) (см. рисунок), то как, известно
из линейной теории управления, в
исследуемой системе будут иметь место
расходящиеся процессы – система
неустойчива.
Вывод.
Для устойчивости периодического решения,
т.е. для возможности существования
автоколебаний, требуется, чтобы при
![]() критерий Михайлова удовлетворялся, а
при
критерий Михайлова удовлетворялся, а
при
![]() не удовлетворялся.
не удовлетворялся.
Аналитическая форма критерия устойчивости периодического решения.
Перемещение
точки
![]() кривой Михайлова (2) при малом изменении
можно характеризовать вектором
кривой Михайлова (2) при малом изменении
можно характеризовать вектором
![]() с проекциями
с проекциями
 ,
,
 . (3)
. (3)
Перемещение
точки вдоль кривой Михайлова определяется
вектором
![]() с проекциями
с проекциями
 ,
,
 . (4)
. (4)
В
обеих случаях звездочка соответствует
подстановке конкретных значений
и
![]() исследуемого периодического решения
в частные производные от выражений
исследуемого периодического решения
в частные производные от выражений
![]() и
и
![]() входящие в равенство (2). Эта подстановка
соответствует начальному положению
точки
.
входящие в равенство (2). Эта подстановка
соответствует начальному положению
точки
.
Пользуясь правами векторной алгебры, определим угол между векторами и
 .
(5)
.
(5)
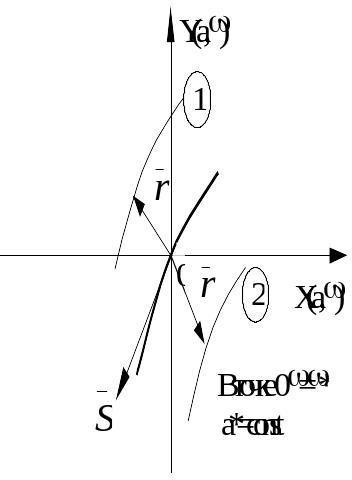
Из
рисунка видно, что если взять
![]() ,
то для выполнения условия устойчивости
периодического решения требуется, чтобы
вектор
был отклонен от вектора
против
часовой стрелки при
и по часовой стрелке при
.
Отсюда, согласно (5) следует
,
то для выполнения условия устойчивости
периодического решения требуется, чтобы
вектор
был отклонен от вектора
против
часовой стрелки при
и по часовой стрелке при
.
Отсюда, согласно (5) следует
 .
.
Поскольку
величины
![]() и
и
![]() положительны (как длины векторов), то
после подстановки (3) и (4), получим, что
для устойчивости периодического решения
требуется
положительны (как длины векторов), то
после подстановки (3) и (4), получим, что
для устойчивости периодического решения
требуется
<1> во - первых выполнение условия
 .
(6)
.
(6)
При
этом производные
![]() и
и
![]() по
,
входящая в неравенство (6) удобно вычислять
в виде
по
,
входящая в неравенство (6) удобно вычислять
в виде
 .
(7)
.
(7)
<2> во - вторых, кроме выполнения условия (6) требуется, чтобы весь ход остальной части кривой Михайлова (за исключением одной точки в начале координат) как показано на рисунке, удовлетворял критерию Михайлова. Последнее условие надо специально проверять только для систем пятого порядка и выше. Для системы третьего и четвертого порядков это условие сводится к простому требованию положительности всех коэффициентов характеристического уравнения системы. Это соответствует тому, что в характеристическом уравнении гармонически линеаризованной системы все остальные корни (кроме исследуемой нами пары чисто мнимых корней) имели отрицательные вещественные части, т.е. чтобы многочлен
удовлетворял критерию Михайлова.