

Коэффициенты гармонической линеаризации.
Базируясь на свойстве фильтра линейной части системы в равенстве

слагаемые
![]()
![]() можно не учитывать. Тогда
можно не учитывать. Тогда
![]() ,
,
где
 ,
,
 .
.
Обозначим
через
 и
и
 .
Пусть далее
.
Пусть далее
![]() ,
тогда значения
,
тогда значения
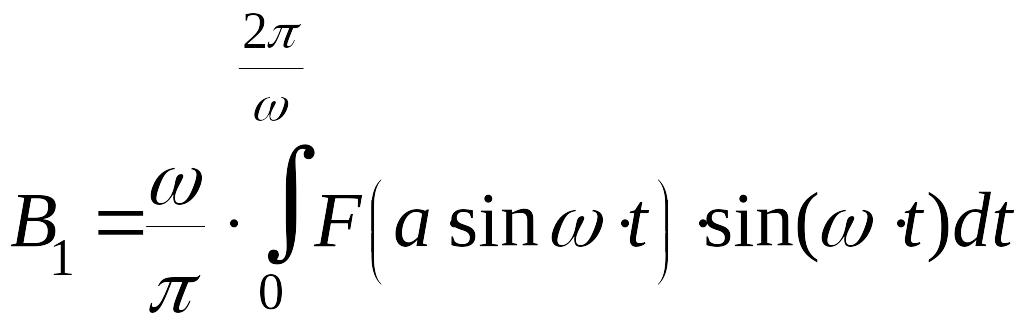
![]() и
и
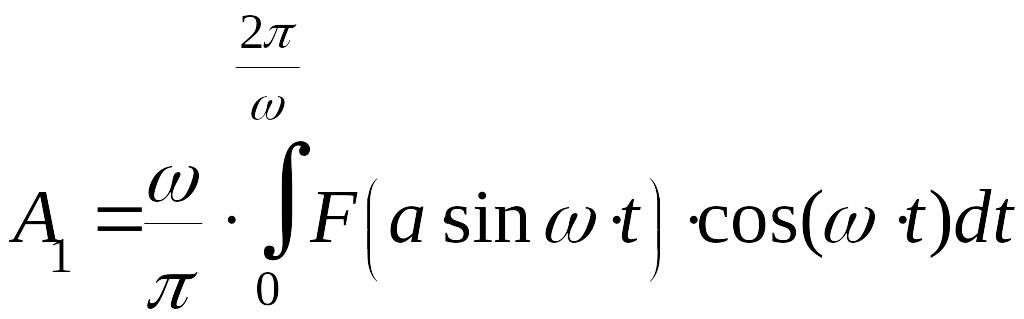
![]() вычисляются по формулам
вычисляются по формулам
 ,
(1)
,
(1)
 .
(2)
.
(2)
Величины и называются коэффициентами гармонической линеаризации.
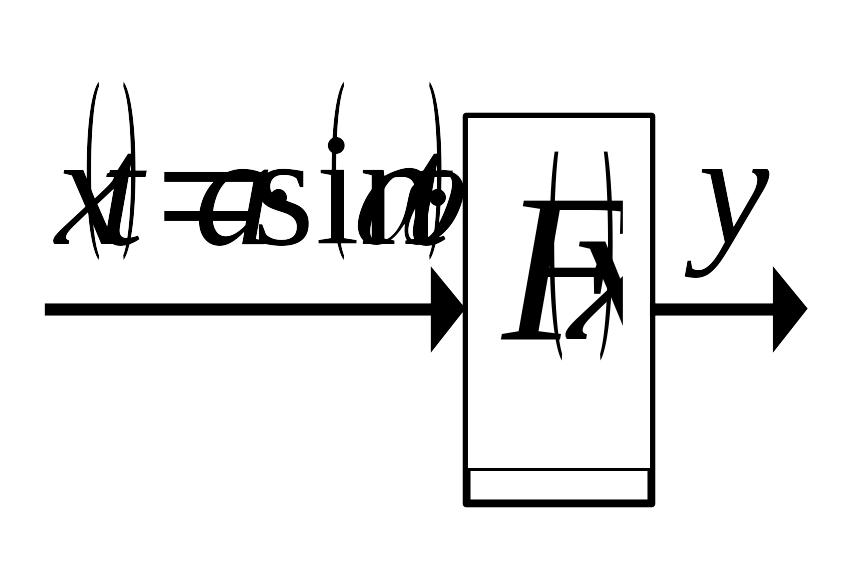
VI. Гармонически линеаризованное нелинейное звено.
С
учетом введенных коэффициентов
гармонической линеаризации
и
равенство
можно переписать следующим образом
![]() ,
но, заметив, что
,
но, заметив, что
![]() получаем
получаем
 ,
,
и, следовательно,
 .
(3)
.
(3)
Представление
(3) называется гармонической линеаризацией
нелинейного звена. Равенство (3) является
линейным относительно переменной
при
![]() ,
т.е. только для данного конкретного
периодического решения
.
Но в целом она сохраняет нелинейные
свойства, т.к. его коэффициенты зависят
от искомого решения, от величины амплитуды
колебаний переменной
.
Эта особенность гармонической линеаризации
и позволяет нам в дальнейшем исследовать
с ее помощью основные свойства и
особенности процессов в нелинейных
системах.
,
т.е. только для данного конкретного
периодического решения
.
Но в целом она сохраняет нелинейные
свойства, т.к. его коэффициенты зависят
от искомого решения, от величины амплитуды
колебаний переменной
.
Эта особенность гармонической линеаризации
и позволяет нам в дальнейшем исследовать
с ее помощью основные свойства и
особенности процессов в нелинейных
системах.
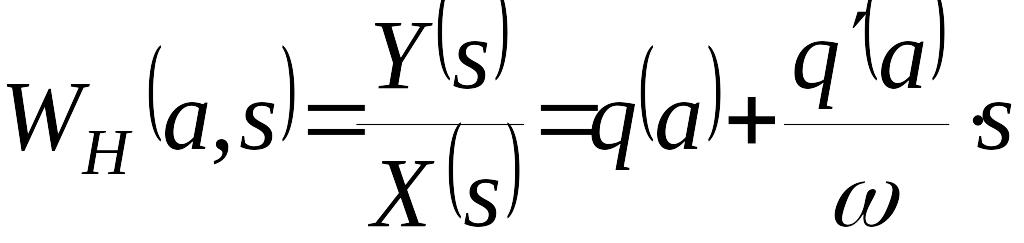
При фиксированном значении и нулевых начальных условиях выполним преобразование по Лапласу равенства (3)
 .
(4)
.
(4)
Таким образом, в результате гармонической линеаризации нелинейный элемент системы автоматического управления заменяется гармонически линеаризованным звеном
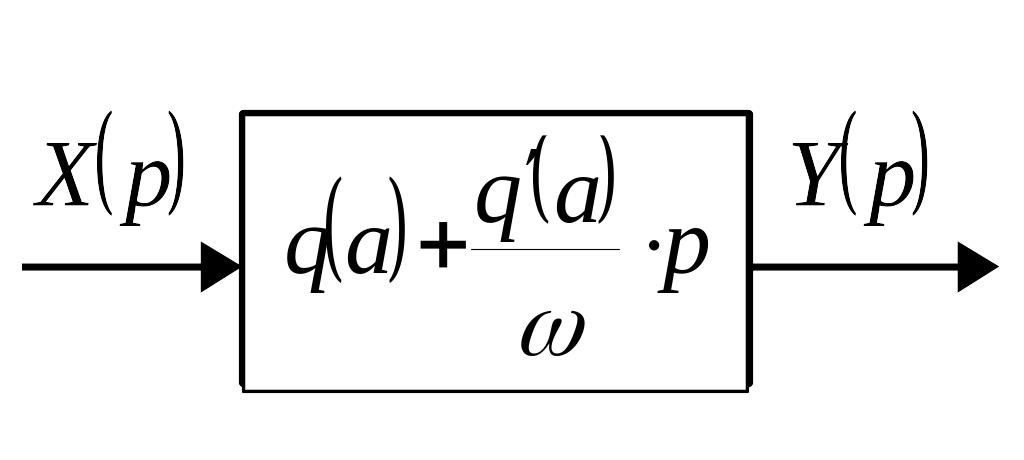
Гармонически линеаризованная периодическая функция нелинейного звена будет иметь вид
 .
.
Амплитудно-фазовая
характеристика нелинейного гармонически
линеаризованного звена получается в
результате формальной перестановки
![]() и имеет вид
и имеет вид
![]() .
Следовательно, амплитудно-фазовая
характеристика нелинейного звена
.
Следовательно, амплитудно-фазовая
характеристика нелинейного звена
![]() зависит только от амплитуды гармонического
сигнала и не зависит от его частоты (в
противоположность характеристикам
линейных звеньев).
зависит только от амплитуды гармонического
сигнала и не зависит от его частоты (в
противоположность характеристикам
линейных звеньев).
Существуют
нелинейности
![]() ,
для которых
,
для которых
![]() ,
,
![]() и
и
![]() будут зависеть от амплитуды
и частоты
.
будут зависеть от амплитуды
и частоты
.
Из сказанного следует алгоритм исследования автоколебаний в нелинейных системах методом гармонической линеаризации.
Исследования автоколебаний в нелинейных системах методом гармонической линеаризации.
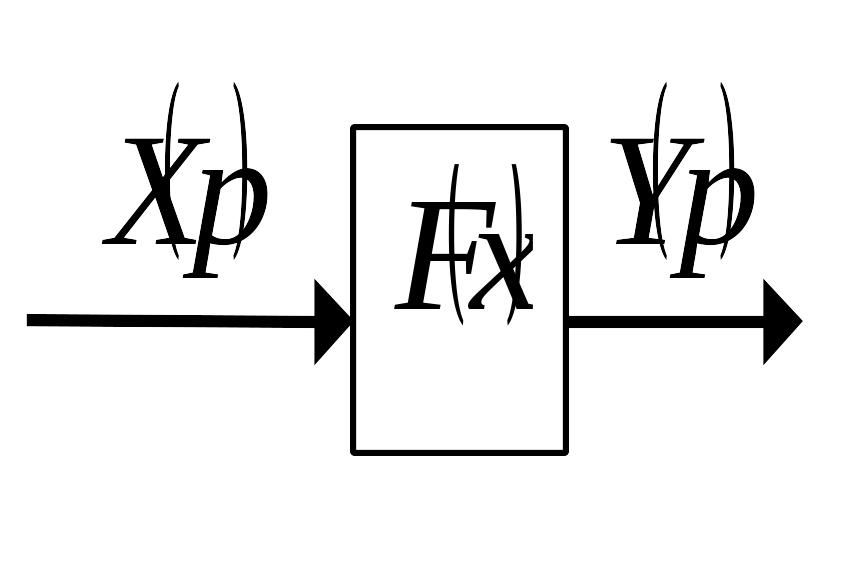
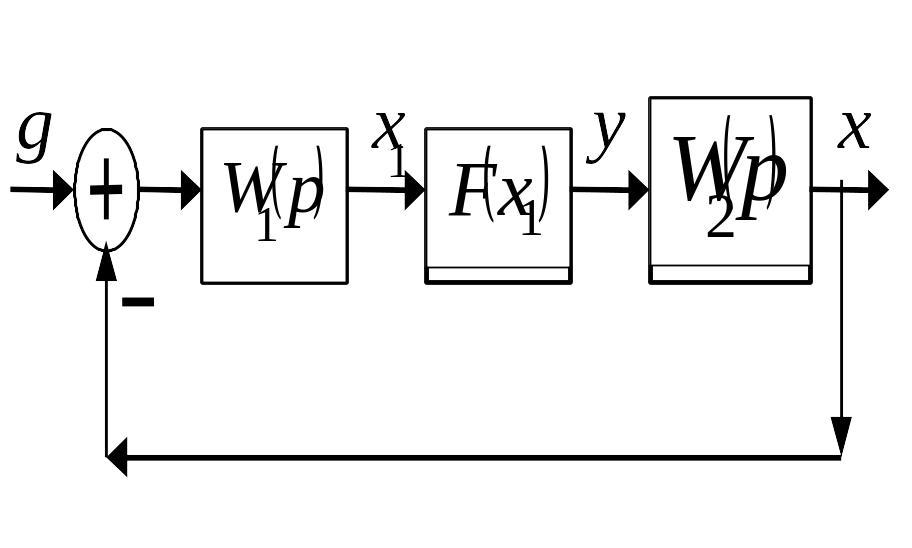
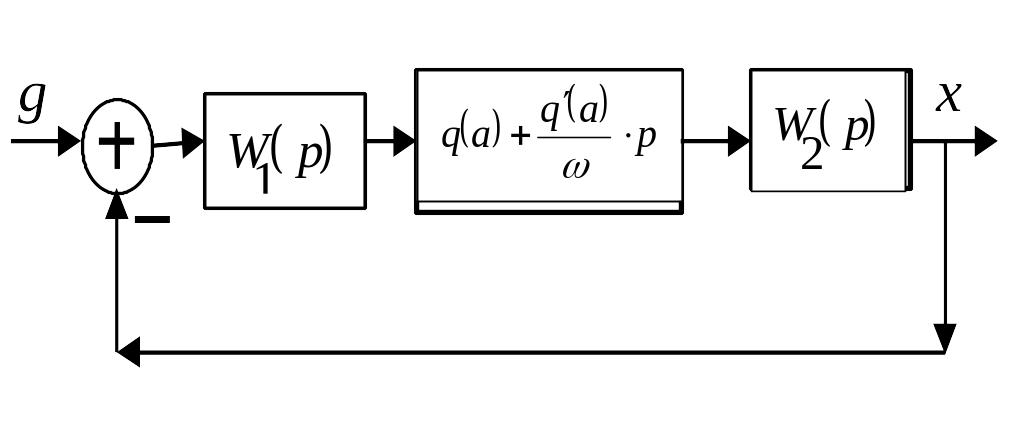
Структурную схему исследуемой системы автоматического управления приведем к виду
,
 ,
,
![]() –
характеристика
нелинейного звена системы управления.
–
характеристика
нелинейного звена системы управления.
Полагают: (условия применения метода гармонической линеаризации)
в исследуемой системе управления возникают автоколебания с частотой и амплитудой .
линейная часть системы обладает свойством фильтра.
Замечание: значения амплитуды и частоты автоколебаний пока неизвестны и подлежат определению.
Вычисляют коэффициенты гармонической линеаризации и по формулам
,
.
Исследуемую нелинейную систему заменяем гармонически линеаризованной системой, структурная схема которой имеет вид
Определяют параметры периодического решения
 –
амплитуду и
–
частоту.
–
амплитуду и
–
частоту.Проводится анализ полученных результатов проверяются гипотезы пункта (2) исследуется устойчивость периодического решения, проводится моделирование процессов в системе на ЭВМ.