

Лабораторная работа №10
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ РЕДУКТОРА
Описание экспериментальной установки.
Установка для экспериментального определения КПД редуктора (рисунок 1 и рисунок 2 ) состоит из электродвигателя 1 и редуктора 2, связанных упругой муфтой. Статор электродвигателя не закреплен и может свободно проворачиваться на валу ротора. Со статором жестко связан рычаг, который опирается на динамометр, как показано на рисунке 3. Динамометр состоит: из стальной пластины 1 и индикатора 2а. К ведомому валу редуктора (рисунок 2) присоединен тормозной механизм 4. Схема этого механизма показана на рисунке 4.
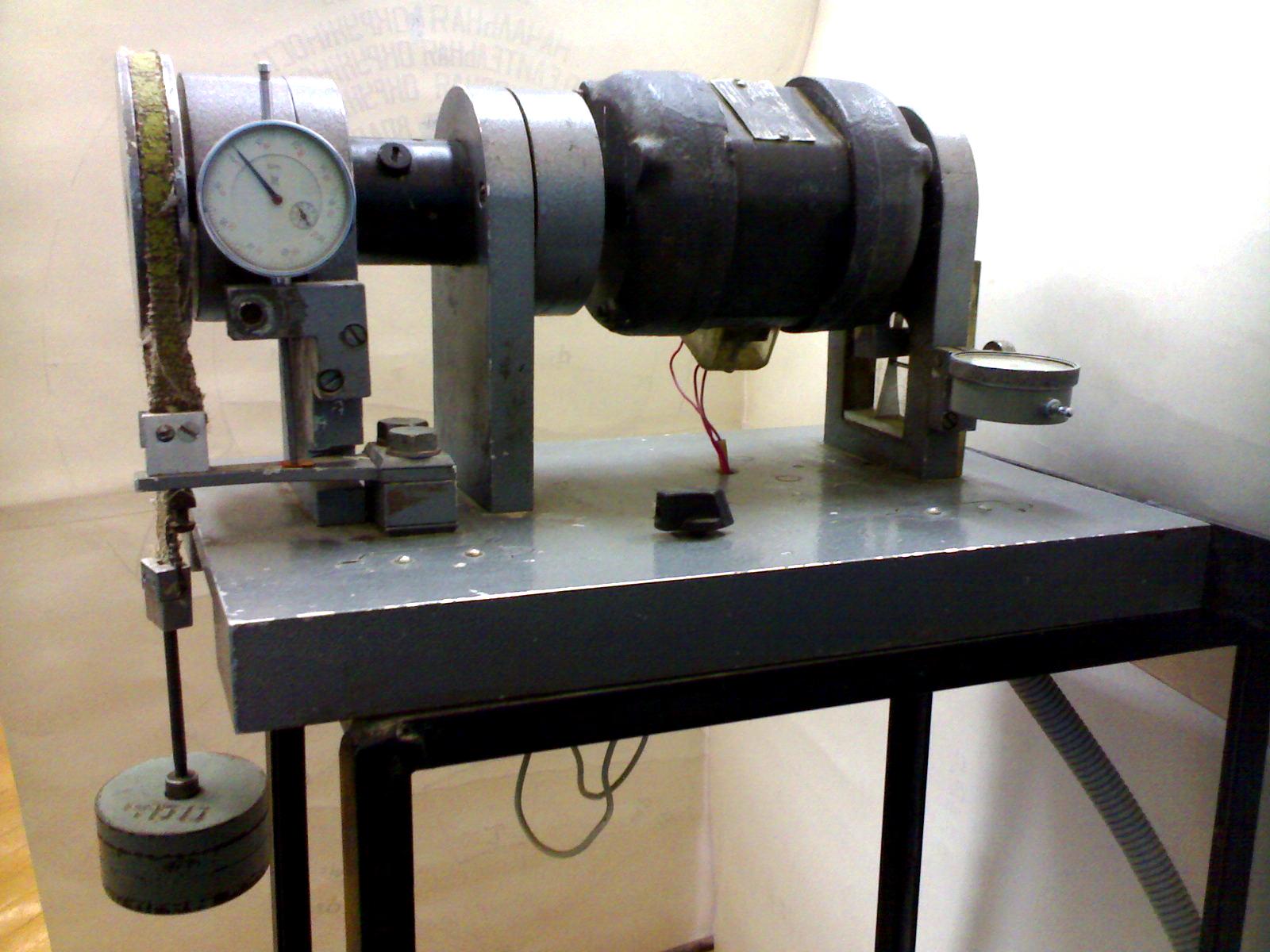
Рисунок 1.
Через тормозной шкив 4 перекинут ремень 5. Натяжение ветвей ремня определяется с одной стороны весом груза и с другой динамометром, состоящим из упругой пластины 1 и индикатора 2б.

Рисунок 2.

Рисунок 3.

Рисунок 4.
2. Методика экспериментального определения кпд редуктора.
Коэффициент полезного действия η для установившегося движения может быть определен как отношение средней мощности сил полезного сопротивления Nпс к средней мощности движущих сил Nд.
![]() (1)
(1)
В данном случае мощность движущих сил равна мощности на валу электродвигателя, а мощность сил полезного сопротивления равна мощности сил трения в тормозном механизме.
Мощность движущих сил можно определить следующим образом
Nд = Мд ·ωд (2)
где Mд - момент на валу двигателя, равный моменту, приложенному к статору;
ωд=ωн - угловая скорость электродвигателя равная угловой скорости оси ведущего звена редуктора.
Мощность сил полезного сопротивления:
Nnc = Мтр ·ω1 (3)
где Мтр - момент сил трения приложенных и ободу тормозного шкива;
ω1 - угловая скорость ведомого звена редуктора.
Подставляя в формулу 1 выражения 2 и 3 после преобразования получим :
![]() (4)
(4)
Из рассмотрения схем изображенных на рис. 2 и рис. 3 можно заключить, что:
Мд=Р·ℓ (5)
где Р - сила, с которой статор давит на динамометр;
ℓ - плечо силы.
Мтр =(S2-S1)·r (6)
где r - радиус тормозного шкива;
S1 - натяжение правой ветви ремня, равное весу груза;
S2 - натяжение девой ветви ремня, измеряемое динамометром.
Натяжение ветвей ремня, огибающих тормозной шкив, связаны формулой Эйлера:
S2=S1·еfα (7)
где е - основание натурального логарифма;
f - коэффициент трения;
α - угол обхвата шкива ремнем в рад.
3. Определение кпд планетарного редуктора аналитически (расчетным методом).
Величина КПД планетарного редуктора зависит от того, передается движение от центрального подвижного колеса к водилу или наоборот, а также от численного значения передаточного отношения.
В таблице 1 сведены формулы для определения КПД планетарного редуктора.
Таблица 1
|
1>U1H>0 |
U1H>1;U1H<0 |
От колеса к водилу |
|
|
От водила к колесу |
|
|
В этих формулах ηH - коэффициент полезного действия при обращенном движении планетарной передачи.
Указанные формулы относятся к определению потерь, возникающих вследствие трения между зубьями. Эти формулы приближенные, т.к. при выводе их мощность в зацеплении определялась без учета потерь на трение во вращательных парах.