

2.5 Метод настройки Шеделя
Метод основан на принципе каскадного коэффициента демпфирования. Шедель обобщает понятие коэффициента демпфирования на случай системы третьего порядка. Здесь для системы с передаточной функцией вида:
справедливы следующие выражения:
![]() ,
,
![]() .
.
Коэффициенты
ПИД-регулятора настраивают так, чтобы
коэффициенты демпфирования системы
были равны
![]() ,
,
![]() .
.
В случае объекта вида:
совершается переход к следующей форме:
 ,
(12)
,
(12)
где
![]() ,
,
![]() ,
,
![]() .
(13)
.
(13)
Параметры ПИД-регулятора рассчитываются по следующим формулам:
 ,
,
 и
и
 .
(14)
.
(14)
Метод Шеделя сокращает время переходного процесса, незначительно увеличивая перерегулирования (менее 10%).
3. Порядок выполнения работы
3.1 Собрать схему моделирования системы с ПИД-регулятором, представленную на рис.3.
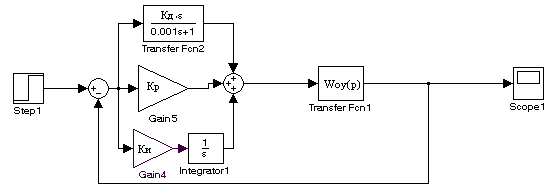
Рис. 3.
3.2 Передаточную функцию первого объекта управления выбрать в соответствии с вариантом в таблице 2.
Таблица 2
Номер варианта |
Передаточная функция объекта управления |
|
|
|
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
|




3.3 Рассчитать коэффициенты настройки ПИД-регулятора по эмпирическому методу Циглера-Никольса.
3.3.1 Перевести систему управления из ПИД-закона регулирования в П-закон регулирования.
3.3.2 Постепенно увеличивая критический коэффициента усиления регулятора добиться незатухающих колебаний в системе и зафиксировать период критических колебаний .
3.3.3 По найденным
и
![]() рассчитать по формулам настройки
ПИД-регулятора.
рассчитать по формулам настройки
ПИД-регулятора.
3.3.4 С помощью функции линейный анализ провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
3.3.5 Повторить пп. 3.3.1-3.3.4 для второго объекта управления.
3.4 Рассчитать коэффициенты настройки ПИД-регулятора по методу Шубладзе с использованием математического пакета Mathcad.
3.4.1 Для первого объекта управления по формулам (2)-(8) рассчитать коэффициенты настройки ПИД-регулятора.
3.4.2 С помощью функции линейный анализ провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
3.4.3 Повторить пп. 3.4.1-3.4.2 для второго объекта управления.
3.5 Рассчитать коэффициенты параметров ПИД-регулятора по методу Куна.
3.5.1 Для первого объекта вычислить суммарную постоянную времени объекта.
3.5.2 Рассчитать параметры ПИД-регулятора с использованием формул нормальной настройки из таблицы 1.
3.5.3 С помощью функции линейный анализ провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
3.5.4 Рассчитать параметры ПИД-регулятора с использованием формул быстрой настройки из таблицы 1.
3.5.5 С помощью функции линейный анализ провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
3.5.6 Повторить пп. 3.5.1-3.5.5 для второго объекта управления.
3.6 Рассчитать коэффициенты настройки ПИД-регулятора по методу Шеделя.
3.6.1 Записать передаточную функцию первого объекта управления в виде (12).
3.6.2 Рассчитать настройки параметров ПИД-регулятора по формулам (14).
3.6.3 С помощью функции линейный анализ провести моделирование системы и получить переходный процесс системы с ПИД-регулятором.
3.6.4 Повторить пп. 3.6.1-3.6.3 для второго объекта управления.
3.7 Проанализировать полученные результате работы и представить их в виде таблицы 3.
Таблица 3
Метод настройки ПИД- регулятора |
Настроечные параметры ПИД-регулятора |
Передаточная функция объекта управления |
Показатели качества переходного процесса
|
||||
|
|
|
|
|
|||
Циглера-Никольса |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Шубладзе |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Куна |
норм. |
|
|
|
|
|
|
быстр. |
|
|
|
|
|
|
|
норм. |
|
|
|
|
|
|
|
быстр. |
|
|
|
|
|
|
|
Шеделя |
|
|
|
|
|
|
|
|
|
|
|
|
|
||