

4. Перечень практических занятий
Таблица 1.
Наименование работы |
Темы занятий |
1. Измерительные устройства |
1. Измерение давления и перепада давления. 2. Измерение температуры. 3. Измерение частоты вращения. |
2. Усилительные органы |
1. Гидравлические усилители. 1.1. Гидравлические усилители со структурным управляющим устройством. 1.2. Гидравлический усилитель одностороннего действия. 2. Пневматические усилители. 2.1. Пневматический безрасходный компенсационный усилитель 2.2. Пневматический безрасходный двухкаскадный усилитель. 3. Комбинированные усилители. 3.1. Электропневматический усилитель 3.2. Электромеханический усилитель |
3. Регулирующие органы |
1. Односедельные клапаны. 2. Двухседельные клапаны. 3. Поворотные заслонки. 4. Трехходовые клапаны. 5. Золотниковые РО. 6. Электрические РО. |
4. Регулятор частоты вращения дизеля ОРН30 |
1. Назначение, устройство, работа. Достоинства и недостатки. |
5. Регулирование частоты вращения дизеля. Всережимный регулятор ВУДВАРД PG |
1. Назначение, устройство, работа при стабилизации частоты вращения. |
6. Регулирование частоты вращения дизеля. Всережимный регулятор ВУДВАРД UG-40TL. |
1. Назначение, устройство, работа на переходных режимах. |
7. Автоматизация топливосжигания в главных котлах. Топочное устройство «Монарх» |
1. Назначение и область применения. Техническая характеристика. Программа подготовки к запуску и запуск топочного устройства «Монарх». Режимы работы на легком и тяжелом топливе. |
5. Практическое занятие №1 измерительные устройства
5.1. Измерение давления и перепада давлений
Давление. В энергетической установке судна давление измеряют в очень широком диапазоне. Воспринимают давление, как правило, упругие и эластичные ЧЭ, деформирующиеся под действием силы от давления среды. Эта сила обычно уравновешивается силой действия пружины СУ. Для измерения малых давлений применяют плоские эластичные и жесткие мембраны (рис. 4, а). Эластичные мембраны изготавливают из аэростатной ткани или дюритовой резины. Ограниченно распространены жесткие мембраны, изготовленные из нержавеющей стали и бериллиевой бронзы, недостатком которых является малый диапазон перемещения. Для увеличения хода применяют мембраны с гофром, направленным вогнутостью в стороны измеряемого давления (рис. 4, б).
а) б) в)

Рис. 4. Схемы действия мембранных чувствительных элементов давления.
Давление p измеряемой среды преобразуется мембранным ЧЭ в усилие
FЧ = pfa,
где fa — часть площади мембраны, передающая усилие и называемая активной площадью.
У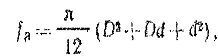 величить
усилие, развиваемое мембраной, можно
применением жесткого центра (рис. 4, в).
Тогда
ее активная площадь
величить
усилие, развиваемое мембраной, можно
применением жесткого центра (рис. 4, в).
Тогда
ее активная площадь
где D — максимальный диаметр подвижной поверхности мембраны;
d — диаметр жесткого центра (не должен превышать 0,8D).
Закономерность работы измерительных устройств в статических и динамических режимах выясним на примере мембранного датчика давления. Входным сигналом датчика (рис. 5, а) является давление р измеряемой среды, а выходным — положение рычага АВ, определяемое перемещением ΔуД точки А. При установившемся режиме сила FЧ, действующая на мембрану от давления среды, уравновешивается суммой сил FП действия пружины 4 и сухого трения FТР в звеньях датчика: FЧ = FП ± FТР.
Р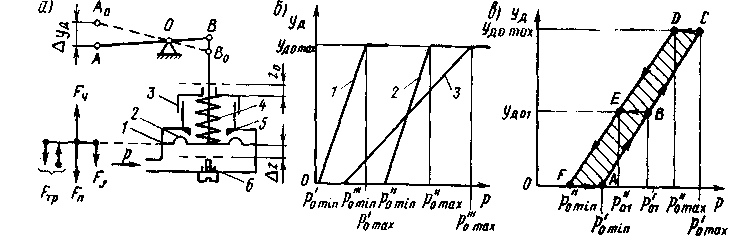 ис.
5. Схемы действия мембранного датчика
давления и его характеристики.
ис.
5. Схемы действия мембранного датчика
давления и его характеристики.
Сила FТР стремится затормозить движение звеньев датчика, действуя с положительным знаком при увеличении силы FЧ и с отрицательным при ее уменьшении (для упрощения в дальнейшем влиянием сил сухого трения будем пренебрегать). Тогда соотношение между силами FЧ и FП для момента страгивания жесткого центра мембраны 2 с упора 6
р0 min fa = c z0,
где р0 min, fa — давление страгивания и активная площадь мембраны;
c, z0 — жесткость и предварительное натяжение пружины.
Жесткость — это сила, необходимая для деформации пружины на единицу длины. Для цилиндрических пружин жесткость постоянна и зависит только от геометрических размеров, числа работающих витков и упругости материала.
Предварительное натяжение z0 пружины 4 устанавливают вращением регулировочной гайки 3 относительно корпуса 1 датчика.
Из соотношения следует, что для каждого датчика давление страгивания мембраны с ограничительного упора пропорционально предварительному натяжению z0 пружины:
p0min
= ![]() z0.
(1)
z0.
(1)
С увеличением давления p0min на значение Δр появляется движущая сила, определяемая разностью между силами FЧ и FП, которая вызывает перемещение Δz мембраны. Согласно второму закону Ньютона эта разность сил уравновешивается силой инерции FJ движущихся масс датчика: FJ = FЧ — FП или
![]() ,
,
где
![]() — масса
подвижных деталей датчика, приведенная
к жесткому центру мембраны;
— масса
подвижных деталей датчика, приведенная
к жесткому центру мембраны;
![]() — ускорение
движения жесткого центра мембраны;
— ускорение
движения жесткого центра мембраны;
![]() = ΔFА
—
изменение силы, действующей на мембрану,
от приращения
= ΔFА
—
изменение силы, действующей на мембрану,
от приращения ![]() давления;
давления;
![]() =
ΔFП
— изменение силы, действующей на мембрану
от дополнительной деформации
=
ΔFП
— изменение силы, действующей на мембрану
от дополнительной деформации ![]() пружины.
пружины.
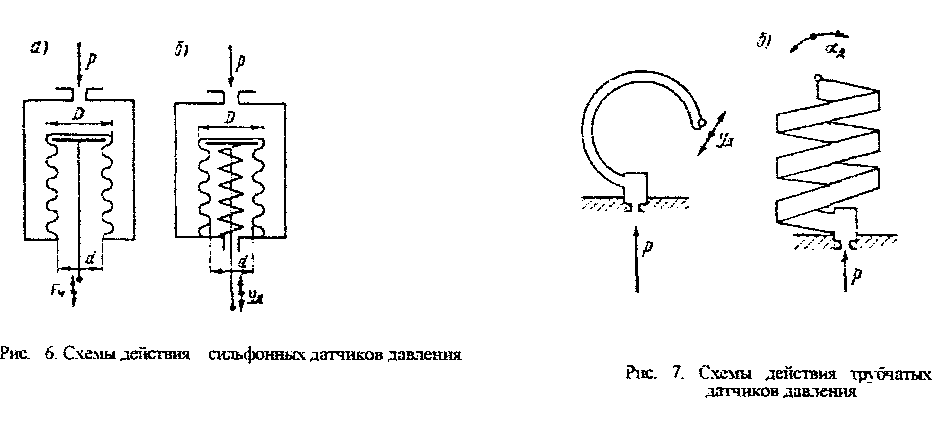
Рис. 6. Схемы действия сильфонных Рис. 7. Схемы действия трубчатых
датчиков давления. датчиков давления.
Сильфонный датчик давления (гармониковая мембрана) представляет собой гофрированную упругую металлическую трубку, закрытую с одного торца, образующего активную площадь (рис. 6, а). Давление р измеряемой среды действует на торец с силой
FЧ = fа р,
где
![]() активная
площадь сильфона.
активная
площадь сильфона.
В датчике эта сила уравновешивается суммой сил упругости сильфона (за счет его собственной жесткости) и дополнительной пружины (рис. 6, б). Выходным сигналом датчика является перемещение ΔуД штока.
Сильфонные датчики применяют для измерения давления различных сред в широком диапазоне (0,01 ÷ 100) 105 Па. При измерении малого давления пружина может отсутствовать, в этом случае действующая сила полностью уравновешивается за счет упругости самого сильфона. Жесткость сильфона зависит от его геометрических размеров, материала, числа гофр и слоев. Для измерения высокого давления необходимо увеличить толщину стенки сильфона, что приводит к повышению его жесткости. В этом случае жесткость можно снизить, сделав сильфон двух - трехслойным в зависимости от необходимой прочности.
Изготовляют сильфоны из тампака и полутампака для низкого и среднего давлений, бериллиевой бронзы и нержавеющей стали для высокого давления. Крепят их с помощью пайки или сварки оловянистыми припоями без применения кислоты.
Манометрическая трубка, или трубка Бурдона (рис. 7, а), представляет собой упругую металлическую трубку эллиптического или прямоугольного сечения, согнутую по радиусу. К неподвижно закрепленному концу трубки подводится измеряемое давление р, которое действует на ее внутренние поверхности, имеющие разные площади, и создает усилие, направленное в сторону поверхности с большей площадью. Это усилие уравновешивается силой упругости самой трубки. Выходной сигнал датчика в виде перемещения ΔуД свободного конца трубки пропорционален изменению давления Δр. При повышении давления трубка выпрямляется, а при снижении — сгибается.
Достоинствами трубки Бурдона являются большая механическая прочность, простота конструкции и широкий диапазон измеряемого давления при линейной характеристике, что позволяет широко использовать ее в контрольно-измерительных приборах и приборах автоматических устройств. Металлические мембраны и трубки Бурдона в рабочей зоне обладают свойствами пружин и практически не имеют остаточной деформации (отсутствует петля гистерезиса). Диапазон измеряемого давления на линейном участке характеристики определяется пределом упругости трубчатой пружины и зависит от конструктивных соотношений размеров и механических свойств материала трубки. Превышение предельных значений вызывает остаточную деформацию пружины, что недопустимо в эксплуатации.
Для измерения давления до 100·105 Па трубчатые пружины изготавливают из латуни или бронзы, для более высокого — из стали.
Г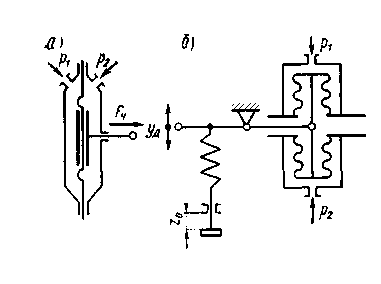 еликоидальная
пружина (рис.
7, б)
представляет собой упругую металлическую
трубку эллиптического
сечения, закрученную по спирали. К
неподвижно закрепленному концу трубки
подводится
измеряемое давление р.
Принципы действия геликоидальной
пружины и трубки Бурдона аналогичны.
Выходным сигналом датчика является
угловое перемещение ΔαД
свободного конца трубки. Геликоидальные
пружины применяют в случаях, когда
требуется получить большие перемещения
выходного
звена датчика при малых изменениях
давления.
еликоидальная
пружина (рис.
7, б)
представляет собой упругую металлическую
трубку эллиптического
сечения, закрученную по спирали. К
неподвижно закрепленному концу трубки
подводится
измеряемое давление р.
Принципы действия геликоидальной
пружины и трубки Бурдона аналогичны.
Выходным сигналом датчика является
угловое перемещение ΔαД
свободного конца трубки. Геликоидальные
пружины применяют в случаях, когда
требуется получить большие перемещения
выходного
звена датчика при малых изменениях
давления.
Рис. 8. Схемы действия датчиков перепада давления.
Перепад давлений. Перепад Δр = р1 — р2 часто измеряют для определения расхода жидкости или газа, а также сопротивления участка трубопровода. Для измерения малых перепадов давления (от 10 до 1600 Па) используют мембранный датчик из эластичной аэростатной ткани, дюритовой резины или фольги (рис. 8, а). Измеряемые давления р1 и р2 подводятся к полости датчика с обеих сторон мембраны, на жестком центре которой создается усилие FЧ, пропорциональное их разности и направленное в сторону меньшего давления. Выходной шток уплотняется в корпусе сальником или сильфоном. Во втором случае приведенная активная площадь мембраны со стороны штока будет меньше на размер активной площади уплотнительного сильфона.
Сильфонный датчик перепада давления (рис. 8, б) имеет измеряемый диапазон значительно шире, чем мембранный. Состоит датчик из двух сильфонов с одинаковой активной площадью, преобразующих измеряемые давления в силы, направленные в противоположные стороны. Разность сил, приведенная к соединительному штоку, уравновешивается силами действия пружины и упругости самих сильфонов. Выходным сигналом датчика является перемещение рычага ΔуД, пропорциональное изменению перепада давлений
Δ(р1 — р2). Двухсильфонные и двухмембранные датчики обладают высокой чувствительностью из-за отсутствия сил сухого трения в уплотнениях штоков.