

10. Практическое занятие №6 всережимный регулятор «вудвард» ug40tl
Регулятор (рис. 25), устанавливаемый на ГД, всережимный, непрямого действия (гидравлический), работоспособностью 54 Н·м, ЖОС и ИОС. Дополнительно в него встроены механизмы ограничения нагрузки по заданной частоте вращения и давлению наддувочного воздуха, минимальной уставке задания, а также устройство дистанционной остановки двигателя.
Одной из особенностей регулятора является задание частоты вращения разворотом входного вала 29. От него через кривошип 22, промежуточный кулак (на схеме не показан) и палец 21 движение передается зубчатому сектору 19, свободно сидящему на валу 29. В регуляторах UG 40 кривошип отсутствует, а зубчатый сектор крепится к валу жестко. От зубчатого сектора движение передается зубчатой втулке 23, в верхней головке которой закреплена ось О. На оси свободно сидит рычаг 18, жестко связанный болтовым соединением с кулачковым рычагом 17, опирающимся на плунжер 24. В результате движения всех указанных звеньев через плунжер изменяется натяжение конической пружины датчика частоты вращения. В то же время через кулак может происходить движение плунжера 24 относительно втулки 23 в результате разворота рычага 18 при перемещении его свободного конца с серьгой 20, вызванном разворотом кривошипа 16 выходного вала 30.
Профиль кулака рычага 17 цилиндрический (см. узел I) с радиусом г. Ось O1 цилиндрической части кулака может совмещаться с осью О при смещении рычага 17 вдоль овального паза, если ослабить болтовое соединение с рычагом 18. Тогда разворот рычага 18 на оси О, вызванный разворотом выходного вала, приводит к развороту кулака по радиусу г и его скольжению по поверхности плунжера 24 относительно втулки 23 и изменяется натяжение конической пружины, т.е. возрастает действие отрицательной силовой ЖОС и значение статической неравномерности регулятора, а следовательно, АСР. Смещением кулака можно изменять степень неравномерности регулятора в пределах 0—12%.
Рассмотрим действие ЖОС при работе регулятора. На установившемся режиме центробежные силы, действующие на грузы датчика частоты вращения, уравновешиваются силой действия конической пружины, удерживая муфту датчика и золотник 26 в среднем положении. Нижняя полость исполнительного механизма заперта, и поршень 25 через кривошипный механизм удерживает выходной вал 30 в неподвижном состоянии.
С ростом нагрузки ГД частота вращения вала снижается, нарушается равновесие сил в датчике, золотник 26 смещается вниз, и обе полости ИМ сообщаются с напорной масляной магистралью. Так как поршень 25 дифференциальный, то он под действием разности сил движется вверх, разворачивая выходной вал 30, и освобождает тягу ТНВД, которая движется в сторону увеличения подачи топлива. Одновременно с разворотом кривошипа 16 через серьгу 20 разворачиваются относительно оси О рычаг 18 и кулак рычага 17. Плунжер 24, прижатый к кулаку конической пружиной, движется относительно втулки 23 вверх, натяжение пружины уменьшается и снижается сила ее действия на грузы, а вследствие увеличения топливоподачи повышается частота вращения вала ГД и возрастает центробежная сила грузов. В результате этого восстанавливается равновесие сил датчика, грузы возвращаются в первоначальное положение, а золотник 26— в среднее, что приводит к ограничению движения поршня 25 и росту топливоподачи. Однако установившийся режим наступает при меньшей частоте вращения вследствие меньшего натяжения конической пружины датчика, т.е. регулятор работает со статической неравномерностью.
Если же действие ЖОС равно нулю, то при установившихся режимах натяжение пружины остается неизменным. Равновесие наступает при различных значениях нагрузки и неизменной частоте вращения, определяемой только уставкой задания регулятора. Однако с ростом нагрузки возможно снижение частоты вращения, если регулятор не может обеспечить необходимое увеличение подачи топлива. Это может быть следствием ограничения топливоподачи с поста управления главным двигателем или по сигналу механизма ограничения самого регулятора. Особенностью работы механизма ограничения нагрузки по заданной частоте вращения является то, что с увеличением нагрузки ограничивается разворот выходного вала регулятора в сторону увеличения топливоподачи пропорционально уставке задания. Вильчатый рычаг 4, свободно сидящий на оси, контактной пружиной через дифференциальный рычаг 33 прижимает серьгу 34 к пальцу кривошипа выходного вала 30, а серьгу 32 — к пальцу кривошипа 22 входного вала 29.
На установившемся режиме при номинальной нагрузке и определенном положении валов указанные звенья неподвижны. Между регулировочным винтом рычага 4 и штангой 6 имеется зазор α1. По мере роста нагрузки двигателя частота вращения снижается, золотник 26 смещается вниз, и выходной вал 30 разворачивается в сторону увеличения подачи топлива. Движение серьги 34 передается через рычаг 33 рычагу 4, который разворачивается на оси 1, и выбирается зазор α1. При дальнейшем развороте рычага 4 движение передается штанге б и рычагу 5. Разворачиваясь вокруг оси 1, рычаг 5 через толкатель 28 и промежуточный рычаг, разворачивающийся относительно опоры О3, воздействует на палец штока золотника, устанавливая его в среднее положение. Это приводит к ограничению движения выходного вала регулятора и роста топливоподачи, т.е. к ограничению нагрузки двигателя. С ростом нагрузки дальнейшее снижение частоты вращения происходит при неподвижной тяге топливного насоса высокого давления.
Максимально возможный угол разворота выходного вала в сторону увеличения подачи топлива изменяется при изменении уставки задания регулятора. Так, при развороте входного вала 29 (см. рис. 25) в сторону уменьшения задания частоты вращения разворачивается вильчатый рычаг 4, а зазор α1 уменьшается. Тогда с ростом нагрузки требуется меньший угол разворота выходного вала, при котором наступает ограничение топливоподачи.
Следовательно, рассмотренный механизм ограничивает разворот выходного вала регулятора и тяги ТНВД в зависимости от уставки задания регулятора, т.е. является механизмом ограничения нагрузки двигателя по заданной частоте вращения.
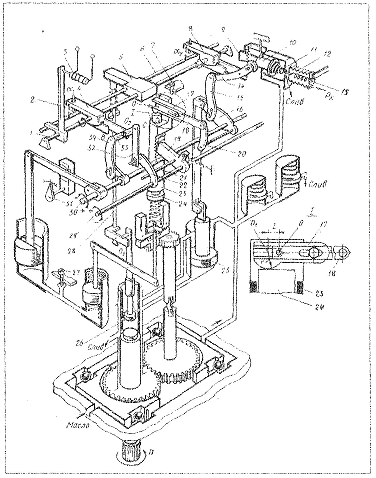
Рис. 25. Регулятор «Вудвард» UG40TL
Методы проверки статической характеристики механизма аналогичны рассмотренным. Если характеристика I механизма (см. рис. 25) по наклону отличается от желаемой III, то изменяют соотношение плеч рычага 33. Для этого ослабляют гайку крепления оси О2 и смещением рычага 33 вдоль его прорези уменьшают плечо ВО2. Если характеристика механизма ограничения нагрузки, заняв положение II, параллельна желаемой III, то необходимо уменьшить зазор α1 вращением регулировочного винта рычага 4. Один оборот винта позволяет сместить характеристику на два условных деления разворота выходного вала регулятора и перемещения h тяги ТНВД.
Проверяют и настраивают механизм ограничения на режиме самого малого хода судна при ручном фиксировании положения тяг ТНВД рукояткой 19. Вращением маховика 20 изменяют уставки R задания регулятора, а по шкале выходного вала снимают соответствующие им значения h. По полученным данным строят график характеристики механизма и сравнивают его данные с требуемыми.
Аналогично работает механизм ограничения нагрузки по давлению наддувочного воздуха. Давление рк наддува подается во внутреннюю полость сильфона 12 (см. рис. 25), на торце которого жестко закреплен клапан II. Клапан управляет сливом масла из правой полости ИМ с дифференциальным поршнем 10, жестко соединенным с профильным кулаком 9. Между клапаном и поршнем установлена пружина силовой ЖОС. Таким образом, устройство представляет собой позиционер, входным сигналом которого является давление рк, а выходным — положение кулака 9.
При установившемся режиме давление рк воздуха, действующее на торец сильфона, уравновешивается суммарной силой действия пружины ЖОС и пружины, встроенной внутрь сильфона. Клапан неподвижен и обеспечивает дросселирование потока масла, поступающего в правую полость ИМ через дроссельную шайбу из напорной магистрали, т. е. дроссельная шайба и клапан образуют делитель давления позиционера.
При разгоне ГД вследствие инерционности газотурбонагнетателей рост давления рк отстает от роста топливоподачи, что может привести к дымному сгоранию топлива. Однако при недостаточном давлении рк позиционер смещает кулак 9 влево и через рычаг 14, опирающийся серьгой 15 на палец кривошипа 16, разворачивает вильчатый рычаг 8. Зазор α2 выбирается, и через рассмотренную кинематическую схему производится установка золотника 26 в среднее положение, а движение выходного вала регулятора в сторону увеличения топливоподачи прекращается. По мере увеличения давления рк ограничение снимается и двигатель постепенно разгоняется. Значение рк, при котором вводится ограничение топливоподачи, задают изменением натяжения пружины сильфона при вращении гайки 13.
Винтом 7 вводится ограничение уставки минимально устойчивой частоты вращения двигателя путем ограничения движения вверх втулки 23. Если входной вал 29 развернут на индекс шкалы «О», то уставка минимальной частоты вращения сохраняется, а между кулаком кривошипа 22 и пальцем 21 появляется зазор. Это позволяет исключить случайную остановку двигателя на режиме самого малого хода в случае чрезмерного уменьшения уставки входного вала регулятора при дистанционном управлении ГД.
Для аварийной (экстренной) остановки ГД через регулятор подают питание на соленоид 3, который через рычаг 2 и кинематическую связь воздействует на золотник 26, устанавливая его в крайнее верхнее положение. Это приводит к сливу масла из-под поршня 2 5 исполнительного механизма и выключению топливоподачи.
ИОС работает так же, как в регуляторе UG8, а ее настройка производится вращением иглы 27 и разворотом рычага 31.